VectorCARD 192101, , , .
. 5. VectorCARD 192101– Leadshine ACM601V36-1000. 100, 4 , 36, 4, 11. – 1000 (, , 4000 () A B ).
– DRV8301-HC-EVM Texas Instruments.
– VectorCARD 192101
192101 «» (ARM Cortex-M4F, 100).
, , . 6.
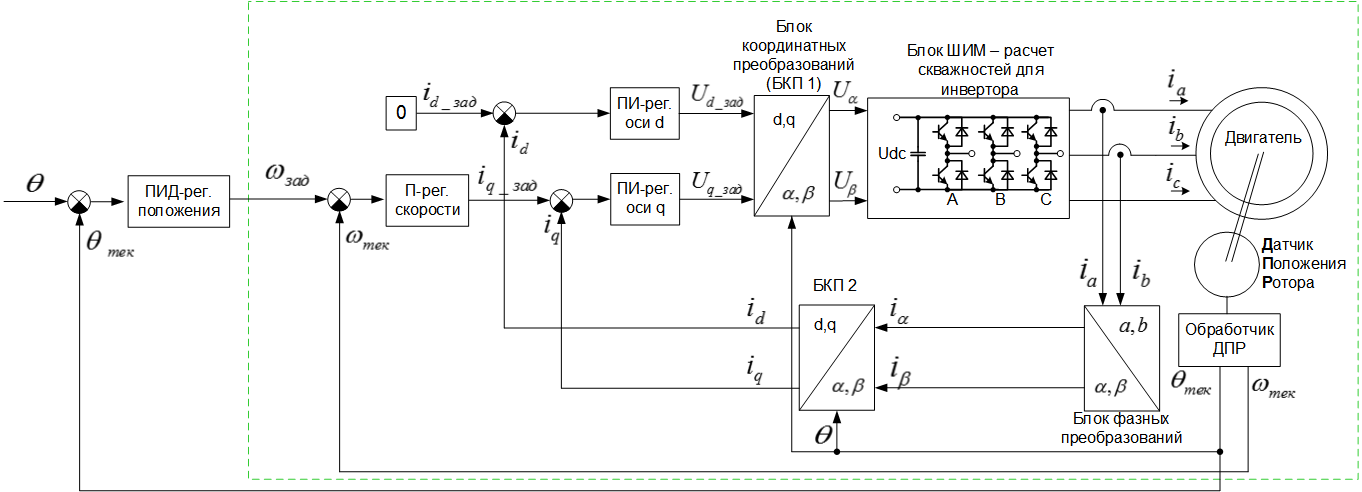 . 6. : (), , .
. 6. : (), , .- , ,
« ». . 1.
20, ( ) – 10. – , . , .