مقدمة
, «» , , . . , , . .
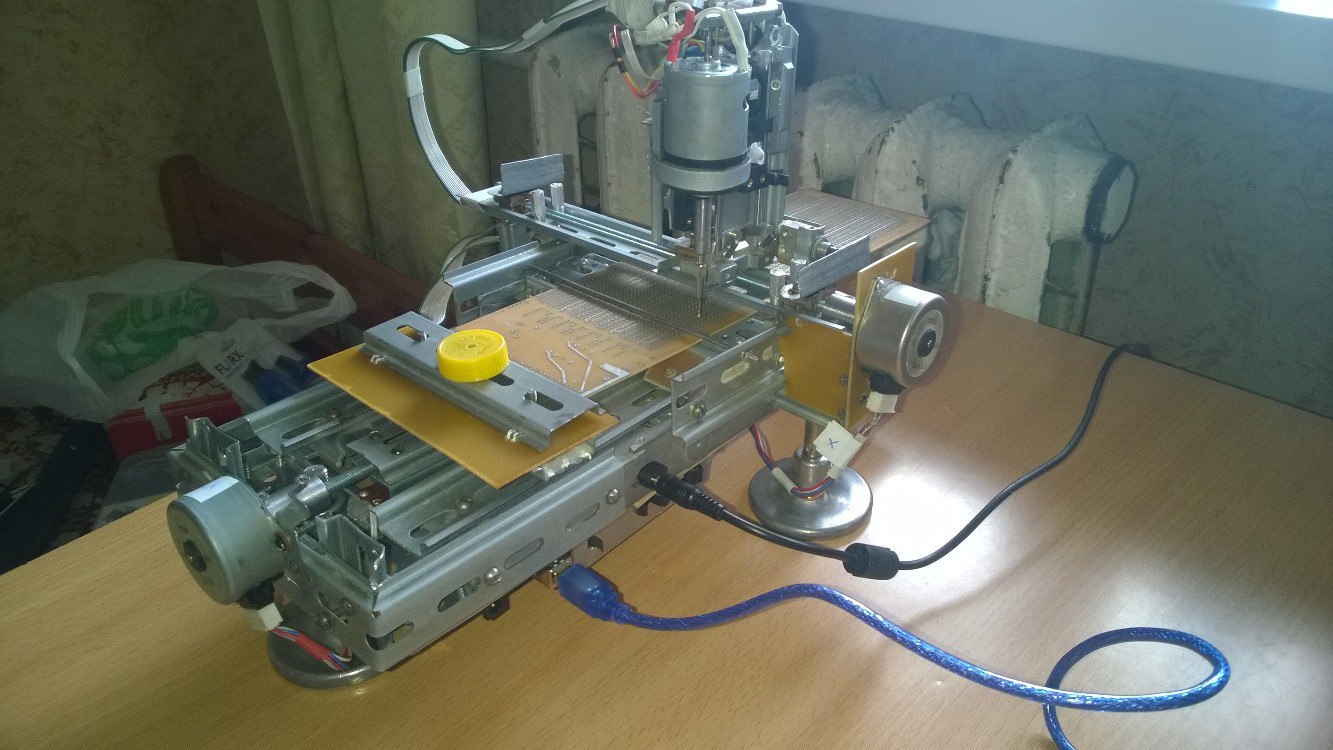
, , . , , - . , .
, ( ), Y . , Arduino. Arduino , .
. . , , , .
Y – . 1 , 1 . , 48 , Z 0,02 . , - . , , , .. , ( ; , ). Y, , DIN-. .
Z . – . .. , , , . , , , , . , , . .

, . .. , () () . .
Arduino USB . 5 Arduino .
75 (19 ; 3,9 ).
(D2, D3) . D1 Arduino . . R9 … R11. 3 , D3, .

1 6 24 . VT1 , .
SB2 … SB7 , / 32 . Y . , SB1 5, .
Arduino, Python GNU/Linux.
. : <method>: [arg1 [arg2 [...]]]\n. . 0 1 (False True).
:
| | |
|---|
| connect: | 2 . res: 1. , COM . , ready: 1. |res: 1 + ready: 1 ;res: 1 + error: 1 |
| touch: | . | res: 1 ; res: 0 |
| move: x y | | res: 1 ; res: 0 ( ; ) |
| drill: x y | | res: 1 ; res: 0 ( move; ) |
| coords: | | res: x y |
:
, , . :
connect , ( )- X Y
error: 1, , ,- , , 0 (False)
, OpenCV, , . , , , , . :
pyserial. (/dev/ttyACM*). connect. res: 1, .
GUI PyQt5.
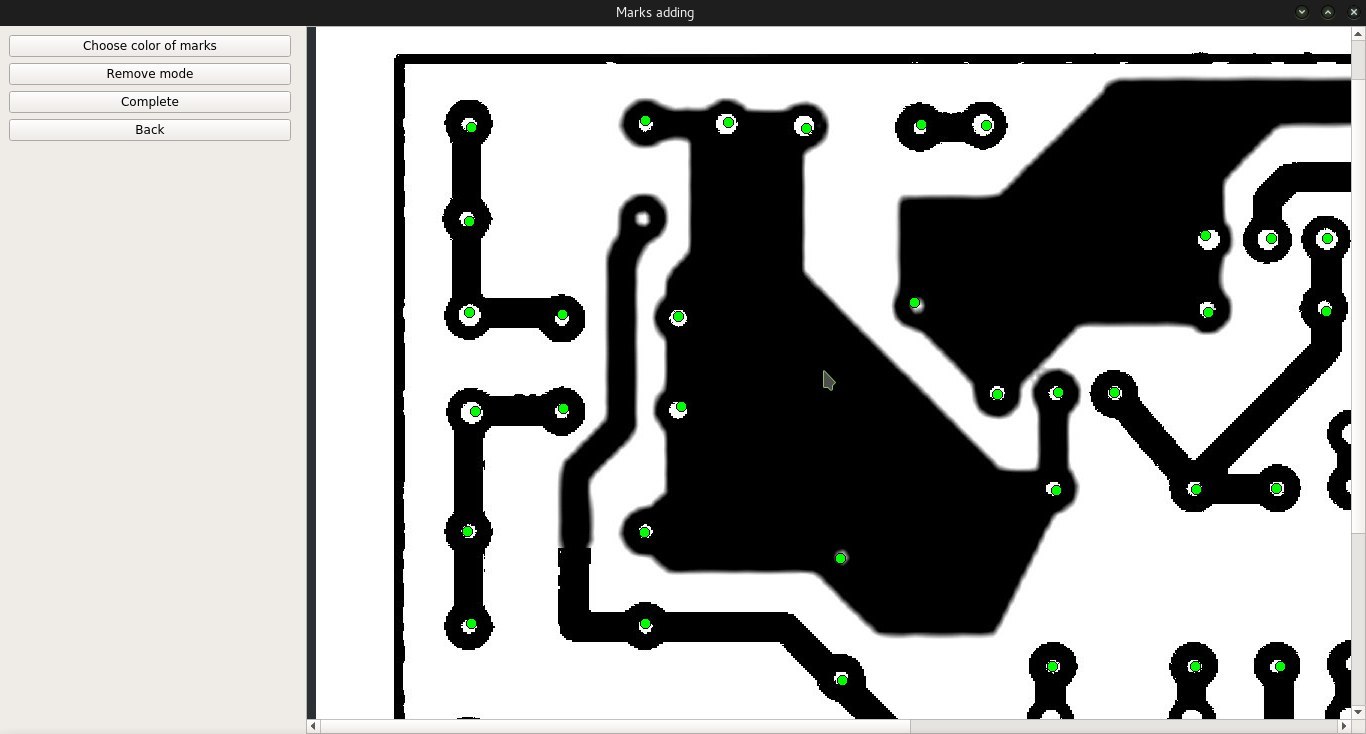
من المخطط إضافة وحدة التعرف التلقائي على النقاط للحفر في تطبيق العميل. في هذه الحالة ، بعد مقارنة الإحداثيات ، سيجد التطبيق تلقائيًا نقاطًا على الرسم ، وسيتعين على المستخدم فقط حذف العناصر الخاطئة وإضافة النقاط غير المعروفة.
رابط المستودع