DIY FPV سباقات الطائرات بدون طيار (الجزء 1) - التجمع
اليوم ، تزداد شعبية السباق على الطائرات بدون طيار بسرعة. ينمو المسافرون الهواة إلى مسابقات دولية جادة ، ويتزايد عدد الأشخاص المشاركين في هذه الهواية. لقد قمت بنفسي مؤخراً بتجميع طائرة رباعية الدفع FPV من الحجم 180 (المسافة بالمليمتر بين محاور المحركات قطريًا) وأسرعت لمشاركة هذه التجربة. كامل عملية تجميع ووضع وصفتها هنا و هنا ، وأدناه هو نسخة معدلة بشكل طفيف تحتوي على مزيد من التفاصيل من مقالاتي السابقة.سأترك مسألة الانضمام إلى هذه الهواية وأذهب مباشرة إلى quadrocopter.
كامل عملية تجميع ووضع وصفتها هنا و هنا ، وأدناه هو نسخة معدلة بشكل طفيف تحتوي على مزيد من التفاصيل من مقالاتي السابقة.سأترك مسألة الانضمام إلى هذه الهواية وأذهب مباشرة إلى quadrocopter.اختيار حجم كوادكوبتر
قبل عام ، كانت الطائرات الرباعية ذات الحجم 250 الأكثر شيوعًا. لكن الآن ، يفضل الطيارون تجميع الأجهزة الصغيرة ، وهو أمر معقول جدًا: الوزن أقل ، لكن القوة هي نفسها. لقد اخترت الحجم 180 ليس لبعض الأسباب العملية ، ولكن كنوع من تحدي التجميع.في الواقع ، هذا النهج في الاختيار ليس صحيحًا تمامًا. من الأكثر حكمة اختيار حجم المراوح أولاً ، وتحتهم بالفعل - أصغر إطار حيث ستناسب المراوح المختارة. وبهذه الطريقة ، يتم رفض التنسيق رقم 180 بشكل عام. احكم بنفسك: يتيح لك تنسيق 210th وضع نفس المراوح مقاس 5 بوصات مثل 250 ، في حين أن الربع الرباعي نفسه أسهل ، وتناسب مراوح 4 بوصة في الإطارات 160. اتضح أن الحجم 180 هو تنسيق متوسط ، وهو "ليس لنا ولا لك." كما يمكن اعتباره مرجحًا رقم 160. ولكن ، مع ذلك ، اخترت ذلك. ربما لأن هذا هو الحد الأدنى للحجم الذي يمكن أن يسحب بشكل أو بآخر كاميرا GoPro أو Runcam بشكل مريح.اكسسوارات
لنبدأ بالمحركات. وتعقّد "الوسطية" من الحجم 180 ، فضلاً عن ثراء تشكيلتها ، الاختيار. من ناحية ، يمكنك أن تأخذ ما يجري على 160 ، من ناحية أخرى ، ما هو مثبت على 210 أو حتى 250. من الضروري الانتقال من المراوح والبطارية (عدد العلب). لا أرى أي سبب لاستخدام بطارية 3S ، وبالنسبة للمراوح ، فإن القواعد العامة هي كما يلي:- تحتاج إلى أقصى دفع ثابت - قم بزيادة قطر المروحة وخفض الملعب (ضمن حدود معقولة)
- تحتاج إلى سرعة عالية - تقليل القطر وزيادة الخطوة (ضمن حدود معقولة)
- تحتاج إلى دفع عالي بقطر صغير - أضف عدد الشفرات (مرة أخرى ضمن حدود معقولة ، لأنه إذا كان الفرق بين المراوح ذات الشفرتين وثلاث شفرات واضحًا ، ثم بين المراوح ذات الثلاث شفرات والأربع شفرات فإنه ليس كبيرًا جدًا)
في حالتي ، لدي حد لحجم المروحة يبلغ 4 بوصات ، لكن ليس لدي حد للمحرك. لذلك ، من المعقول للغاية استخدام مراوح بوللنوسي 4045 ذات ثلاث شفرات. من الصعب تحقيق التوازن ، ولكن عناصر التحكم أكثر استجابة ويمكن التنبؤ بها ، والصوت أكثر هدوءًا. من ناحية أخرى ، مع المراوح ذات الشفرتين ، فإن سرعة quadrocopter أعلى ، لكنني بالتأكيد لست بحاجة إلى ذلك. "بشكل شعبي" في 180s تسود الإعدادات التالية:- خفيفة الوزن بمحركات 1306-3100 كيلو فولت ، مراوح 4045 تقليدية وبطارية 850 مللي أمبير
- ثقيلة وقوية لمراوح بوللنوسي ذات ثلاث شفرات وكاميرا أكشن بمحركات 2205-2600 كيلو فولت وبطارية 1300 مللي أمبير في الساعة
في الواقع ، يسمح لك الإطار بوضع المحركات من 1306-4000KV إلى 22XX-2700KV. بالمناسبة ، لا أعرف السبب ، لكن المحركات 1806-2300KV أصبحت الآن في حالة خزي ولا تستخدم إلا قليلاً.أخذت المحركات الرباعية - RCX H2205 2633KV . أولاً ، كنت أرغب في الحصول على هامش من القوة (على الرغم من مهاراتي التجريبية المتواضعة ، ليس من الواضح لماذا). ثانيًا ، لم تتحول إعداداتي أبدًا إلى ضوء فائق ، بالإضافة إلى أنني أخطط أيضًا لحمل كاميرا الحركة. على وجه التحديد ، تعتبر محركات RCX خيار حل وسط. إنها رخيصة ، ولكن هناك العديد من الشكاوى حول الجودة. في وقت شراء المكونات ، كانت هذه واحدة من عدد قليل من المحركات 2205-2600KV في السوق. الآن (في وقت الكتابة) ، النطاق أكبر بكثير ومن الأفضل اختيار شيء آخر.مع بقية المكونات ، تصرف وفقًا لمبدأ "المزيد من التحدي":- RC180 V2. ( 2-3 ), , 3. , , , , 1-2 .
- FrSky D4R-II. FrSky X4R-SB, , . , . .
- FVT LittleBee 20A — , . - FVT LittleBee 20A PRO Silabs F396 ( , Silabs F330), FVT LittleBee 20A-S, BLHeli_S. LittleBee 20A.
- Foxeer FX799T — , .
- Sony Super HAD CCD 600TVL (IR Block, NTSC, 2.8). Foxeer XAT600M, .
- Diatone.
- -«» BeeRotor -.
- MICRO MinimOSD.
- , . Matek Mini Power Hub, . , 3S, PBD .
- Turnigy nano-tech 1300mAh 4S 45~90C.
- ZG 12Bit WS2812B LED Board. , , - ( ) . .
- DYS 3-blade 4040 Bullnose.
اختيار جهاز التحكم في الطيران
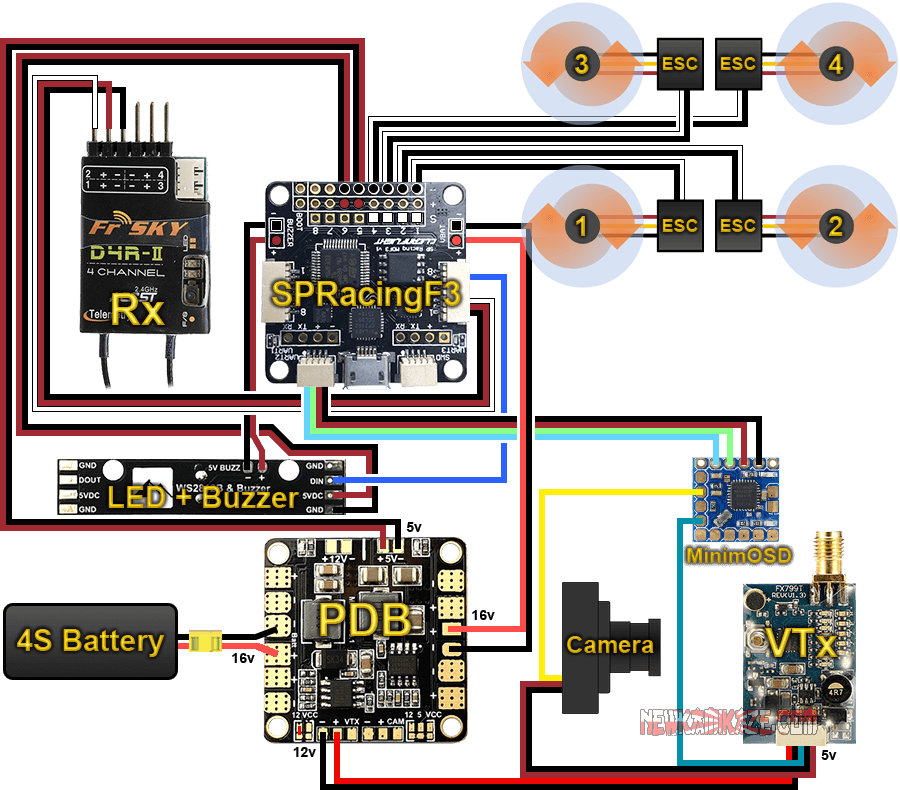
ربما لاحظت أنه لا توجد وحدة تحكم طيران في القائمة. أريد أن أصف اختياره بمزيد من التفصيل. غالبًا ما تتضمن مجموعات البناء منخفضة التكلفة وحدة تحكم CC3D ، لذلك ربما يكون هذا هو أرخص جهاز كمبيوتر في الوقت الحالي. اليوم ، لا يوجد أي نقطة على الإطلاق في شراء CC3D. إنها قديمة ولا تحتوي على أشياء ضرورية مثل مراقبة البطارية و "مكبر الصوت". خلفه ، CC3D Revolution ، منتج مختلف تمامًا بميزات غنية ، ولكن سعره أيضًا يزيد عن 40 يورو.لقد تحولت وحدات التحكم في الطيران الحديثة بالفعل من معالجات F1 إلى F3 ، مما جعل الجيل الأخير من أجهزة كمبيوتر Naze32 وخفض سعره بشكل كبير. الآن هي وحدة تحكم شعبية لديها كل ما تريده الروح بسعر 12 يورو أو أكثر.من الجيل الجديد من أجهزة الكمبيوتر ، يعد Seriously Pro Racing F3 هو الأكثر شيوعًا ، أولاً وقبل كل شيء ، بسبب توافر استنساخ غير مكلف. وحدة التحكم نفسها ليست بأي حال من الأحوال أدنى من Naze32 ، بالإضافة إلى أنها تحتوي على معالج F3 سريع ، وكمية كبيرة من الذاكرة ، وثلاثة منافذ UART ، وعاكس لـ S.Bus. لقد اخترت SPRacingF3 Acro . لم يتم النظر في بقية أجهزة الكمبيوتر الحديثة بسبب السعر ، أو بعض الميزات المحددة (البرامج الثابتة المغلقة ، والتخطيط ، وما إلى ذلك)سألاحظ بشكل منفصل الاتجاه الحالي المألوف لدمج عدة لوحات في لوحة واحدة. في معظم الأحيان ، PC و OSD أو PC و PDB لا أدعم هذه الفكرة مع وجود استثناءات. لا أريد تغيير وحدة التحكم في الطيران بالكامل بسبب OSD محترق. بالإضافة إلى ذلك ، كما تظهر الممارسة ، فإن مثل هذا الاتحاد يجلب أحيانًا مشاكل .مخطط الأسلاك
من الواضح أن جميع المكونات التي تحتاج إلى طاقة 5V أو 12V ستستقبلها من BECs في لوحة توزيع الطاقة. يمكن تشغيل الكاميرا نظريًا مباشرة من بطارية 4S ، لأن جهد الإدخال يسمح بذلك ، ولكن لا ينبغي القيام بذلك بأي حال من الأحوال. أولاً ، جميع الكاميرات معرضة جدًا للضوضاء في الدائرة من المنظمين ، مما سيؤدي إلى تداخل في الصورة. ثانيًا ، تعطي الهيئات التنظيمية ذات الكبح النشط (مثل جهاز LittleBee) ، عند تنشيط هذا الكبح ، دفعة خطيرة جدًا للشبكة الموجودة على متن الطائرة ، والتي يمكن أن تحرق الكاميرا. علاوة على ذلك ، يعتمد وجود النبض بشكل مباشر على تآكل البطارية. الجديد لا يفعل ، لكن القديم يفعل. في ما يلي مقطع فيديو إعلامي حول موضوع تداخل الهيئات التنظيمية وكيفية تصفيتها. لذا من الأفضل تشغيل الكاميرا إما من BEC أو من جهاز إرسال فيديو.أيضًا ، من أجل تحسين جودة الصورة ، يوصى باستخدام ليس فقط سلك إشارة من الكاميرا على OSD ، ولكن أيضًا على الأرض. إذا قمت بلف هذه الأسلاك إلى "ضفيرة" ، فإن "الأرض" تعمل كشاشة لسلك الإشارة. صحيح ، في هذه الحالة ، لم أكن.إذا كنا نتحدث بالفعل عن "الأرض" ، غالبًا ما يتم الجدل حول ما إذا كان سيتم توصيل "الأرض" من المنظمين بجهاز الكمبيوتر أو سلك إشارة واحد فقط. في سباقات quadrocopter التقليدية ، تحتاج بالتأكيد إلى الاتصال. يمكن أن يؤدي غيابه إلى فشل التزامن ( التأكيد ).تحول مخطط الأسلاك النهائي إلى بسيط وموجز ، ولكن مع بعض الفروق الدقيقة:- توريد جهاز تحكم الطيران (5V) من PDB عبر مخرجات للمنظمين
- الطاقة للراديو (5 فولت) من الكمبيوتر عبر موصل OI_1
- مصدر طاقة جهاز إرسال فيديو (12V) من PDB
- طاقة الكاميرا (5V) من جهاز إرسال الفيديو
- OSD متصل بـ UART2. يستخدم العديد من الأشخاص UART1 لهذا ، ولكن كما هو الحال في Naze32 ، فإن هذا الموصل متوازي مع USB.
- Vbat متصل بالكمبيوتر ، وليس بـ OSD. من الناحية النظرية ، يمكن قراءة قراءات جهد البطارية (vbat) على كل من OSD والكمبيوتر الشخصي ، عن طريق توصيل البطارية إما بواحدة أو بأخرى. ما الفرق؟ في الحالة الأولى ، ستكون القراءات موجودة فقط على شاشة الشاشة أو النظارات ولن يعرف الكمبيوتر عنها أي شيء. في الحالة الثانية ، يمكن لجهاز الكمبيوتر مراقبة جهد البطارية وإبلاغ الطيار عنها (على سبيل المثال ، "squeaker") ، وكذلك نقل هذه البيانات إلى OSD ، إلى "الصندوق الأسود" وعن طريق القياس عن بعد إلى جهاز التحكم عن بعد. كما يعد ضبط دقة القراءات أسهل من خلال الكمبيوتر الشخصي. أي أن توصيل vbat بجهاز التحكم في الطيران هو الأفضل كثيرًا.
التجمع
للبدء ، إليك بعض نصائح التجميع العام:- . , .
- , , , . , , . , .
- PLASTIK 71, . , , .
- . .
- «» ().
أفضل أن أبدأ التجميع مع المحركات والمنظمين. هنا فيديو جيد عن تجميع كوادروبرتر صغير ، تبنت منه فكرة ترتيب أسلاك المحركات.أود أيضا أن أقول عن تركيب المنظمين: أين ومع ماذا؟ يمكن تثبيتها على الشعاع وتحته. لقد اخترت الخيار الأول ، حيث يبدو لي أن المنظم في هذا الموقف أكثر حماية (هذه هي تكهناتي ، لم تؤكدها الممارسة). بالإضافة إلى ذلك ، عند تركيبه على شعاع ، يتم تبريد المنظم تمامًا عن طريق الهواء من المروحة. الآن حول كيفية إصلاح المنظم. هناك العديد من الطرق ، الأكثر شيوعًا - شريط مزدوج الوجه + واحد أو اثنين من قدد التسوية. "رخيصة ومبهجة" ، بالإضافة إلى تفكيك الصعوبات لن يسبب. الأسوأ من ذلك ، مع مثل هذا التثبيت ، يمكنك إتلاف لوحة التنظيم (إذا وضعت مقرنة عليه) أو الأسلاك (إذا قمت بربطها). لذلك قررت ربط المنظمين بأنبوب انكماش حراري (25 مم) ولحمهم مع الحزم. هناك تحذير واحد: يجب أن يكون المنظم نفسه في حالة انكماش حراري (تم بيع المنجم فيه) ،حتى لا تتلامس مع ألياف الكربون من الشعاع ، وإلا - ماس كهربائى. من المنطقي أيضًا لصق قطعة من الشريط مزدوج الوجه من الأسفل على كل شعاع على جبل المحرك. أولا ، سوف تحمي المحرك من الغبار. ثانيًا ، إذا كان أحد البراغي مفككًا لسبب ما ، فلن يسقط أثناء الرحلة ولن يضيع.عند تجميع الإطار ، لم أستخدم برغيًا واحدًا من المجموعة ، لأنها كلها قصيرة بشكل غير لائق. بدلاً من ذلك ، حصلت على وقت أطول قليلاً ورأس لمفك فيليبس (هناك مثل هذا التفضيل الشخصي).لم تتناسب الكاميرا مع العرض بين الألواح الجانبية للإطار. عالجت حواف لوحها قليلاً بملف (كان من المرجح أن تطحن الخشونة) ونهضت دون أي مشاكل. لكن الصعوبات لم تنته عند هذا الحد. لقد أحببت حقًا جودة حامل الكاميرا من Diatone ، لكن الكاميرا التي معها لم تتناسب مع ارتفاع الإطار (حوالي 8-10 مم). أولاً ، قمت بتثبيت الحامل على الجانب الخارجي (العلوي) من اللوحة من خلال مخمد النيوبرين ، ولكن تبين أن التصميم غير موثوق به. في وقت لاحق جاءت فكرة التثبيت الأكثر بساطة وموثوقية. أخذت فقط مشبك من جبل Diatone ووضعته على قطعة قضيب بخيط M3. لمنع الكاميرا من التحرك بشكل جانبي ، قمت بإصلاح المشبك مع وصلات النايلون.
من المنطقي أيضًا لصق قطعة من الشريط مزدوج الوجه من الأسفل على كل شعاع على جبل المحرك. أولا ، سوف تحمي المحرك من الغبار. ثانيًا ، إذا كان أحد البراغي مفككًا لسبب ما ، فلن يسقط أثناء الرحلة ولن يضيع.عند تجميع الإطار ، لم أستخدم برغيًا واحدًا من المجموعة ، لأنها كلها قصيرة بشكل غير لائق. بدلاً من ذلك ، حصلت على وقت أطول قليلاً ورأس لمفك فيليبس (هناك مثل هذا التفضيل الشخصي).لم تتناسب الكاميرا مع العرض بين الألواح الجانبية للإطار. عالجت حواف لوحها قليلاً بملف (كان من المرجح أن تطحن الخشونة) ونهضت دون أي مشاكل. لكن الصعوبات لم تنته عند هذا الحد. لقد أحببت حقًا جودة حامل الكاميرا من Diatone ، لكن الكاميرا التي معها لم تتناسب مع ارتفاع الإطار (حوالي 8-10 مم). أولاً ، قمت بتثبيت الحامل على الجانب الخارجي (العلوي) من اللوحة من خلال مخمد النيوبرين ، ولكن تبين أن التصميم غير موثوق به. في وقت لاحق جاءت فكرة التثبيت الأكثر بساطة وموثوقية. أخذت فقط مشبك من جبل Diatone ووضعته على قطعة قضيب بخيط M3. لمنع الكاميرا من التحرك بشكل جانبي ، قمت بإصلاح المشبك مع وصلات النايلون.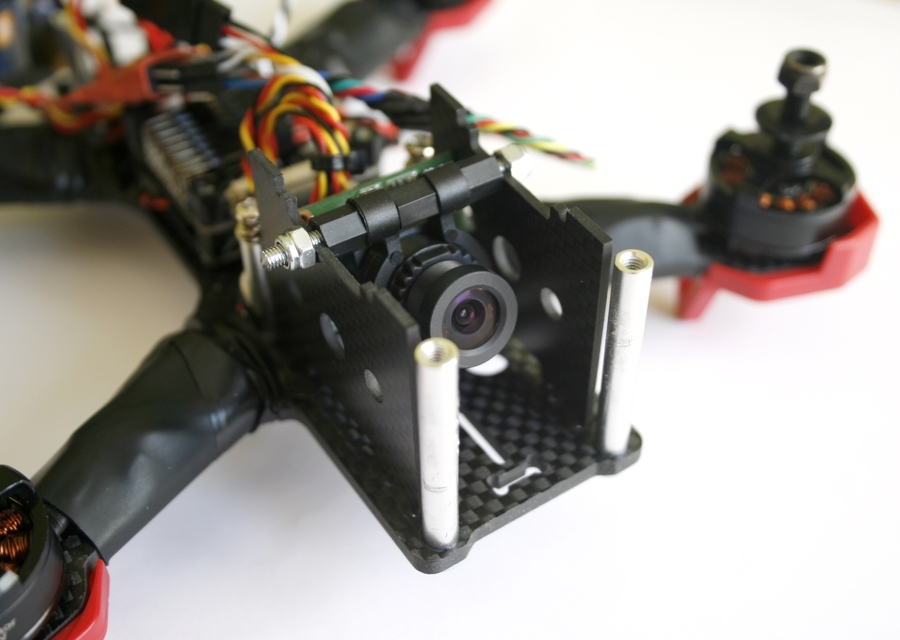 لقد أحببت كثيرًا أنه يجب فقط لحام وصلات الموصلات من الموصلات الموجودة على جهاز الكمبيوتر. لم تتناسب الموصلات الكاملة ثلاثية السن مع طولي ، واضطررت للذهاب إلى الحيلة واستخدام الموصلات ذات الدبوسين. بالنسبة للقنوات الخمس الأولى (4 للمنظمين + 1 "لكل إطفائي") ، قمت بربط الموصلات بلوحة الإشارة و "الأرض" ، بالنسبة للقنوات الثلاث الأخرى - إلى "زائد" و "أرض" بحيث يمكن تشغيل الكمبيوتر نفسه ومنه بالفعل - الإضاءة الخلفية. نظرًا لأن المستنسخات الصينية من أجهزة التحكم في الطيران تخطئ من خلال التثبيت غير الموثوق به لموصل USB ، فقد قمت بلحمه أيضًا. سمة أخرى من سمات استنساخ SPRacingF3 هي موصل مكبر الصوت. كما هو الحال في vbat ، يوجد على الجانب العلوي من اللوحة موصل JST-XH ثنائي السنون ، وعلى الجانب السفلي يتم نسخه بواسطة منصات الاتصال. الحيلةأن استنساخ "الأرض" على الموصل ثابت وعند استخدامه ، سيتم تنشيط "مكبر الصوت" دائمًا. يتم عرض العمل العادي ل "مكبر الصوت" "الأرض" فقط على لوحة الاتصال. يمكن التحقق من ذلك بسهولة من قبل المختبر: "زائد" الموصل يستدعي "زائد" على لوحة الاتصال ، و "ناقص" - لا يتصل. لذلك ، تحتاج إلى لحام أسلاك "مكبر الصوت" في الجزء السفلي من الكمبيوتر.
لقد أحببت كثيرًا أنه يجب فقط لحام وصلات الموصلات من الموصلات الموجودة على جهاز الكمبيوتر. لم تتناسب الموصلات الكاملة ثلاثية السن مع طولي ، واضطررت للذهاب إلى الحيلة واستخدام الموصلات ذات الدبوسين. بالنسبة للقنوات الخمس الأولى (4 للمنظمين + 1 "لكل إطفائي") ، قمت بربط الموصلات بلوحة الإشارة و "الأرض" ، بالنسبة للقنوات الثلاث الأخرى - إلى "زائد" و "أرض" بحيث يمكن تشغيل الكمبيوتر نفسه ومنه بالفعل - الإضاءة الخلفية. نظرًا لأن المستنسخات الصينية من أجهزة التحكم في الطيران تخطئ من خلال التثبيت غير الموثوق به لموصل USB ، فقد قمت بلحمه أيضًا. سمة أخرى من سمات استنساخ SPRacingF3 هي موصل مكبر الصوت. كما هو الحال في vbat ، يوجد على الجانب العلوي من اللوحة موصل JST-XH ثنائي السنون ، وعلى الجانب السفلي يتم نسخه بواسطة منصات الاتصال. الحيلةأن استنساخ "الأرض" على الموصل ثابت وعند استخدامه ، سيتم تنشيط "مكبر الصوت" دائمًا. يتم عرض العمل العادي ل "مكبر الصوت" "الأرض" فقط على لوحة الاتصال. يمكن التحقق من ذلك بسهولة من قبل المختبر: "زائد" الموصل يستدعي "زائد" على لوحة الاتصال ، و "ناقص" - لا يتصل. لذلك ، تحتاج إلى لحام أسلاك "مكبر الصوت" في الجزء السفلي من الكمبيوتر.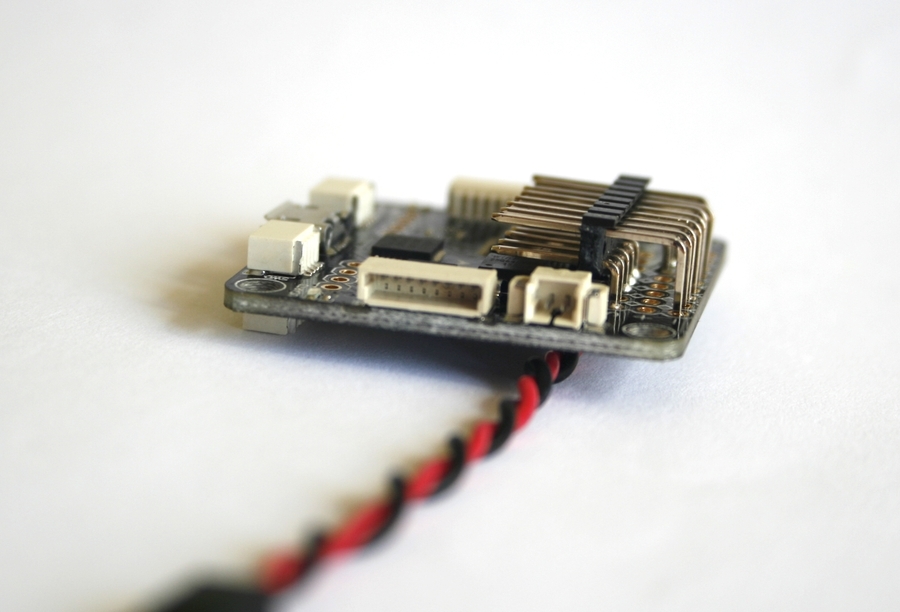 كما يجب استبدال الموصلات الثلاثة للمنظمين. كان من الممكن استخدام أربعة مقابس ذات دبوسين ، ولكن بدلاً من ذلك ، أخذت مقابس ذات أربعة دبابيس وأدخلت جميع وحدات التحكم في "أرض" واحدة ، وسلك إشارة في الثانية (بعد ترتيب توصيل المحركات).
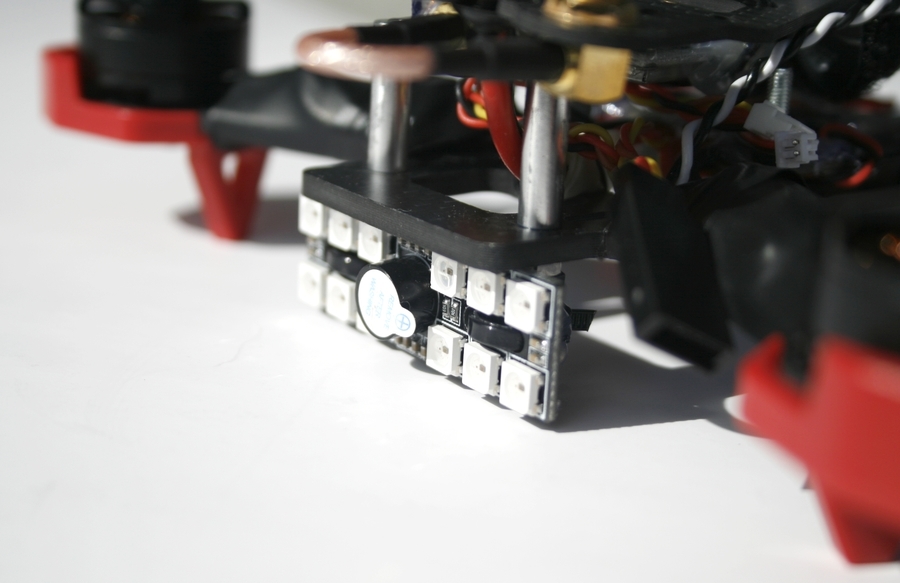
كما يجب استبدال الموصلات الثلاثة للمنظمين. كان من الممكن استخدام أربعة مقابس ذات دبوسين ، ولكن بدلاً من ذلك ، أخذت مقابس ذات أربعة دبابيس وأدخلت جميع وحدات التحكم في "أرض" واحدة ، وسلك إشارة في الثانية (بعد ترتيب توصيل المحركات).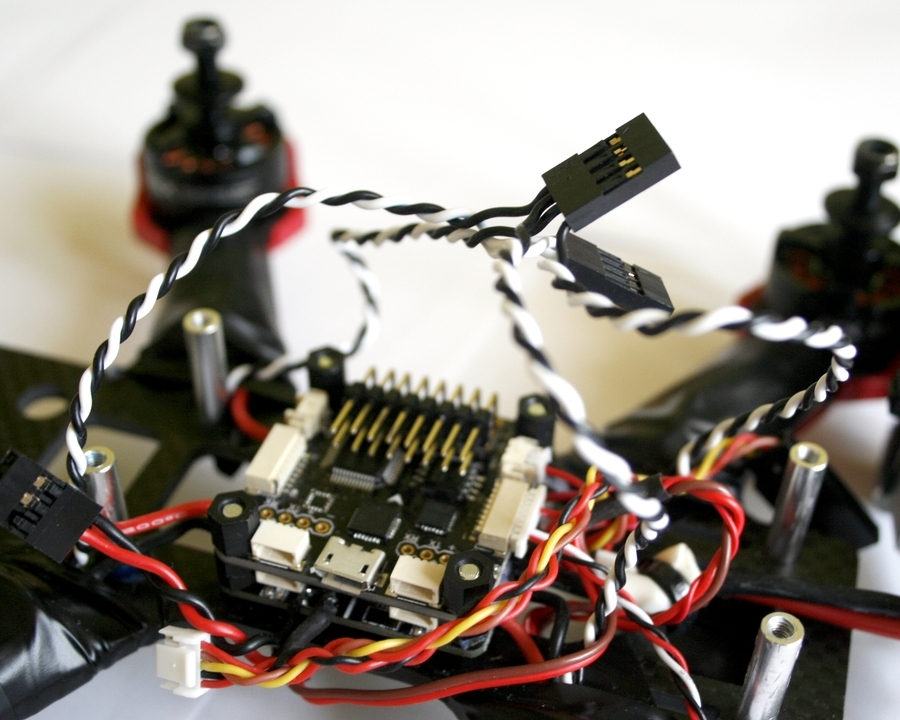 اللوحة الخلفية ذات عرض أوسع من الإطار وتبرز على الجانبين. المكان الوحيد الذي لن تصطدم فيه المراوح هو تحت الإطار. اضطررت إلى المزرعة الجماعية: لقد حملت مسامير طويلة ، وضعت عليها وصلات من النايلون مع فتحات معدة مسبقًا (بحيث يمكن تثبيت الروابط التي تثبت الإضاءة الخلفية) وربطها من خلال اللوحة السفلية في رفوف الإطار. قام بسحب اللوحة المزودة بمصابيح LED إلى الأرجل الناتجة بربطها (الثقوب الموجودة في اللوحة تتناسب تمامًا) وملأ العلاقات بالغراء الساخن. من الجزء الخلفي من الموصلات ملحوم لوحة.بالفعل بعد التجميع ، في مرحلة الإعداد ، اتضح أن هناك خطأ ما في الصرير. مباشرة بعد توصيل البطارية ، بدأت في الصرير رتيبة ، وإذا قمت بتنشيطها من جهاز التحكم عن بعد ، فإن هذا الصرير الرتيب تم فرضه أيضًا على إيقاع. في البداية ، أخطأت على جهاز الكمبيوتر ، ولكن بعد قياس الجهد باستخدام جهاز متعدد ، أصبح من الواضح أين كانت المشكلة بالضبط. في الواقع ، منذ البداية كان من الممكن توصيل LED عادي بأسلاك مكبر الصوت. ونتيجة لذلك ، طلبت عدة مكبرات صوت في وقت واحد ، واستمعت إليهم وأعلى مستوى.
اللوحة الخلفية ذات عرض أوسع من الإطار وتبرز على الجانبين. المكان الوحيد الذي لن تصطدم فيه المراوح هو تحت الإطار. اضطررت إلى المزرعة الجماعية: لقد حملت مسامير طويلة ، وضعت عليها وصلات من النايلون مع فتحات معدة مسبقًا (بحيث يمكن تثبيت الروابط التي تثبت الإضاءة الخلفية) وربطها من خلال اللوحة السفلية في رفوف الإطار. قام بسحب اللوحة المزودة بمصابيح LED إلى الأرجل الناتجة بربطها (الثقوب الموجودة في اللوحة تتناسب تمامًا) وملأ العلاقات بالغراء الساخن. من الجزء الخلفي من الموصلات ملحوم لوحة.بالفعل بعد التجميع ، في مرحلة الإعداد ، اتضح أن هناك خطأ ما في الصرير. مباشرة بعد توصيل البطارية ، بدأت في الصرير رتيبة ، وإذا قمت بتنشيطها من جهاز التحكم عن بعد ، فإن هذا الصرير الرتيب تم فرضه أيضًا على إيقاع. في البداية ، أخطأت على جهاز الكمبيوتر ، ولكن بعد قياس الجهد باستخدام جهاز متعدد ، أصبح من الواضح أين كانت المشكلة بالضبط. في الواقع ، منذ البداية كان من الممكن توصيل LED عادي بأسلاك مكبر الصوت. ونتيجة لذلك ، طلبت عدة مكبرات صوت في وقت واحد ، واستمعت إليهم وأعلى مستوى.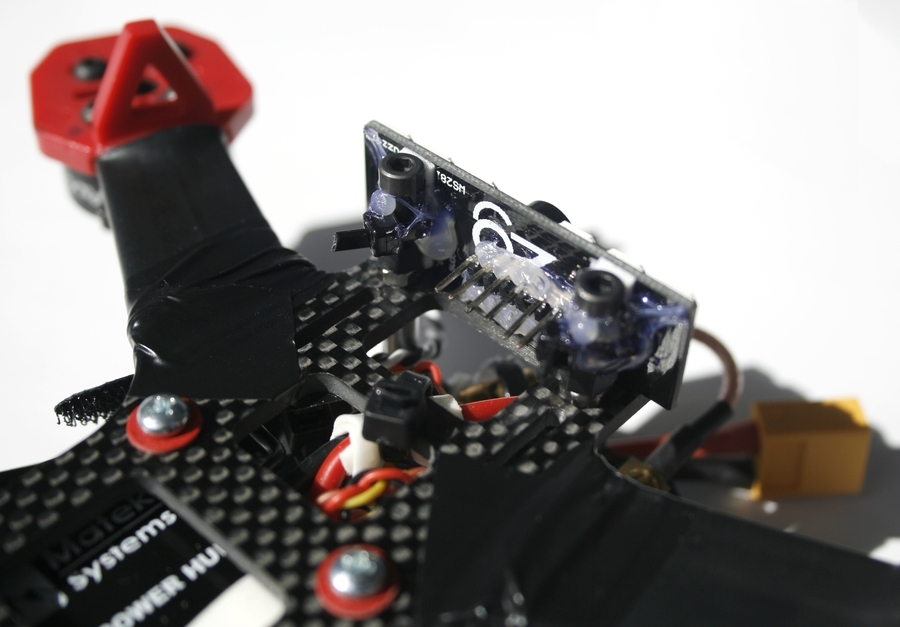
 غالبًا ما يتم توصيل PDB ووحدة التحكم بالإطار بمسامير من النايلون ، لكنني لا أثق في قوتهما. لذلك استخدمت البراغي المعدنية 20 مم ووصلات النايلون. بعد تثبيت PDB ، قمت بتوصيل الطاقة إلى المنظمين (تم لحام الأسلاك الأخرى مقدمًا) وملأت نقاط اللحام بالغراء الساخن. لقد قمت بتثبيت كابل الطاقة الرئيسي المؤدي إلى البطارية بالإطار بحيث لا يتمزق في حالة وقوع حادث.
غالبًا ما يتم توصيل PDB ووحدة التحكم بالإطار بمسامير من النايلون ، لكنني لا أثق في قوتهما. لذلك استخدمت البراغي المعدنية 20 مم ووصلات النايلون. بعد تثبيت PDB ، قمت بتوصيل الطاقة إلى المنظمين (تم لحام الأسلاك الأخرى مقدمًا) وملأت نقاط اللحام بالغراء الساخن. لقد قمت بتثبيت كابل الطاقة الرئيسي المؤدي إلى البطارية بالإطار بحيث لا يتمزق في حالة وقوع حادث.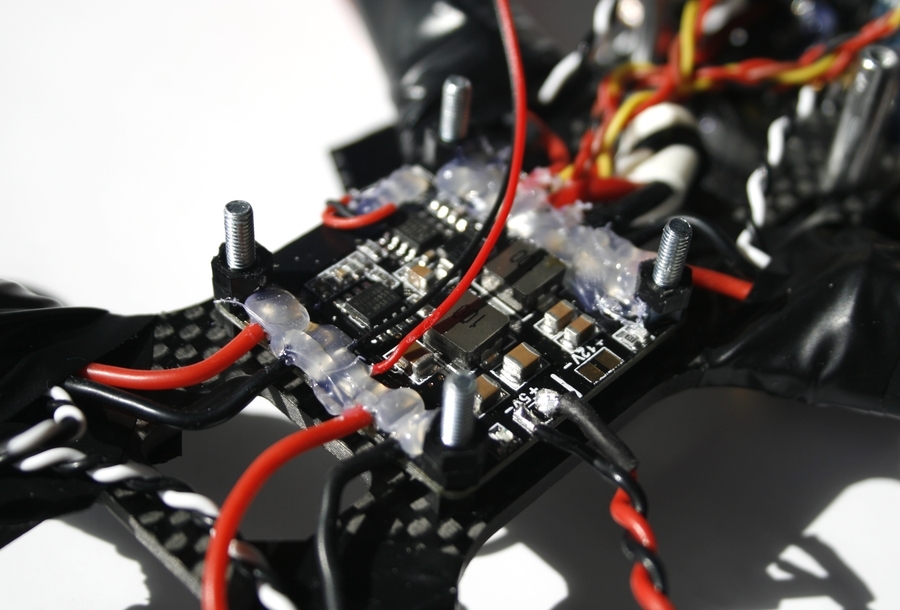 لقد قمت بإزالة جميع الموصلات من جهاز الاستقبال باستخدام كماشة ، باستثناء الثلاثة الضرورية ، وقمت بإزالة الرابط بين القناتين الثالثة والرابعة مباشرة على اللوحة. كما كتبت أعلاه ، سيكون من الحكمة أخذ جهاز استقبال بدون موصلات. كما قمت بنشر هوائيات وانصهرت في انكماش حراري. على الإطار ، يتناسب جهاز الاستقبال بشكل جيد بين PBD والعمود الخلفي. مع هذا الترتيب ، تكون مؤشراته مرئية بوضوح ويمكن الوصول إلى زر الربط.
لقد قمت بإزالة جميع الموصلات من جهاز الاستقبال باستخدام كماشة ، باستثناء الثلاثة الضرورية ، وقمت بإزالة الرابط بين القناتين الثالثة والرابعة مباشرة على اللوحة. كما كتبت أعلاه ، سيكون من الحكمة أخذ جهاز استقبال بدون موصلات. كما قمت بنشر هوائيات وانصهرت في انكماش حراري. على الإطار ، يتناسب جهاز الاستقبال بشكل جيد بين PBD والعمود الخلفي. مع هذا الترتيب ، تكون مؤشراته مرئية بوضوح ويمكن الوصول إلى زر الربط.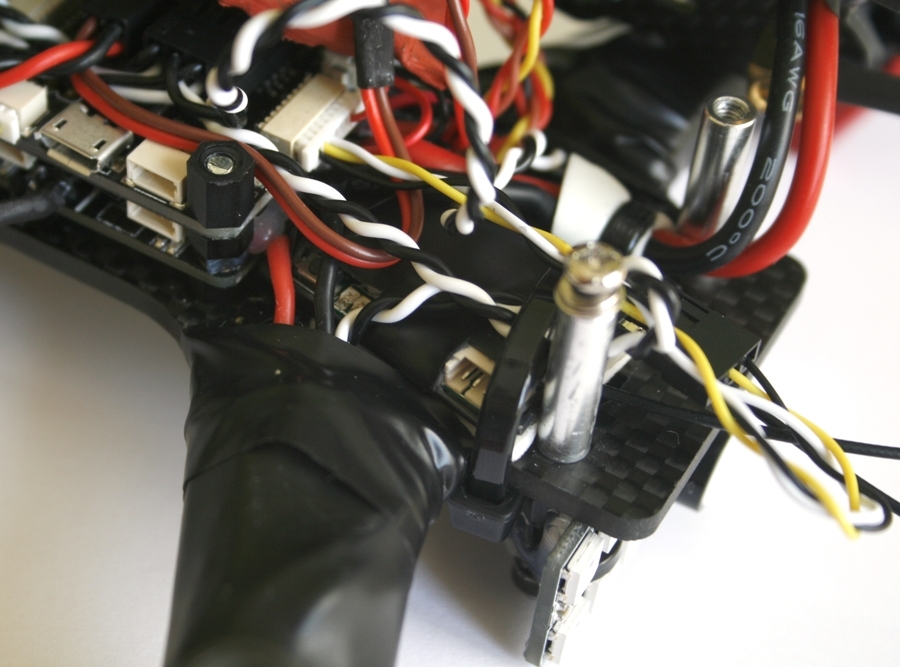 قمت بتثبيت جهاز إرسال الفيديو بعلاقات وغراء ساخن على اللوحة العلوية للإطار بحيث يكون من خلال الفتحة الوصول إلى زر تبديل القناة ومؤشرات LED.
قمت بتثبيت جهاز إرسال الفيديو بعلاقات وغراء ساخن على اللوحة العلوية للإطار بحيث يكون من خلال الفتحة الوصول إلى زر تبديل القناة ومؤشرات LED. يوجد ثقب خاص في الإطار لتوصيل هوائي إرسال الفيديو. ولكن لا تقم بتوصيله مباشرة بجهاز الإرسال. اتضح نوعًا من الرافعة ، حيث يعمل الهوائي كتف واحد ، والمرسل نفسه مع جميع الأسلاك كالآخر ، وستكون نقطة توصيل الموصل هي نقطة ارتكاز ، والتي سيكون لها أقصى حمل. وبالتالي ، في حالة وقوع حادث مع احتمال 100 ٪ تقريبًا ، ينقطع الموصل الموجود على لوحة جهاز الإرسال. لذلك ، تحتاج إلى تركيب الهوائي من خلال نوع من المحول أو سلك التمديد.إلى MinimOSD ، قررت لحام الموصلات ، وليس الأسلاك مباشرة. في المنتديات ، يكتبون أن هذا المنتدى يحترق في كثير من الأحيان ، لذلك من الحكمة الاستعداد على الفور لاستبدال محتمل. أخذت الشريط مع الموصلات في صفين ، ملحومة السفلية إلى منصات مع ثقوب ، وأحضر vIn و vOut إلى العلوي. بعد ذلك ، ملأ أماكن اللحام بالغراء الساخن وعبأ اللوحة بالكامل في تقليص الحرارة.
يوجد ثقب خاص في الإطار لتوصيل هوائي إرسال الفيديو. ولكن لا تقم بتوصيله مباشرة بجهاز الإرسال. اتضح نوعًا من الرافعة ، حيث يعمل الهوائي كتف واحد ، والمرسل نفسه مع جميع الأسلاك كالآخر ، وستكون نقطة توصيل الموصل هي نقطة ارتكاز ، والتي سيكون لها أقصى حمل. وبالتالي ، في حالة وقوع حادث مع احتمال 100 ٪ تقريبًا ، ينقطع الموصل الموجود على لوحة جهاز الإرسال. لذلك ، تحتاج إلى تركيب الهوائي من خلال نوع من المحول أو سلك التمديد.إلى MinimOSD ، قررت لحام الموصلات ، وليس الأسلاك مباشرة. في المنتديات ، يكتبون أن هذا المنتدى يحترق في كثير من الأحيان ، لذلك من الحكمة الاستعداد على الفور لاستبدال محتمل. أخذت الشريط مع الموصلات في صفين ، ملحومة السفلية إلى منصات مع ثقوب ، وأحضر vIn و vOut إلى العلوي. بعد ذلك ، ملأ أماكن اللحام بالغراء الساخن وعبأ اللوحة بالكامل في تقليص الحرارة. اللمسة الأخيرة هي ملصق رقم الهاتف. سيعطي على الأقل القليل من الأمل في حالة فقدان quadrocopter.
اللمسة الأخيرة هي ملصق رقم الهاتف. سيعطي على الأقل القليل من الأمل في حالة فقدان quadrocopter. انتهى التجمع على هذا. اتضح بشكل مضغوط وفي نفس الوقت ، تم الحفاظ على الوصول إلى جميع الهيئات الإدارية الضرورية. يمكن رؤية المزيد من الصور هنا.. كتلة quadrocoprera بدون بطارية 330 جرام ، مع بطارية - 470 جرام. وهذا بدون كاميرا عمل ويتصاعد من أجلها. في المقالة التالية سأتحدث عن البرامج الثابتة وضبط quadrocopter الناتجة.
انتهى التجمع على هذا. اتضح بشكل مضغوط وفي نفس الوقت ، تم الحفاظ على الوصول إلى جميع الهيئات الإدارية الضرورية. يمكن رؤية المزيد من الصور هنا.. كتلة quadrocoprera بدون بطارية 330 جرام ، مع بطارية - 470 جرام. وهذا بدون كاميرا عمل ويتصاعد من أجلها. في المقالة التالية سأتحدث عن البرامج الثابتة وضبط quadrocopter الناتجة. Source: https://habr.com/ru/post/ar395455/
All Articles