تعلم الروبوت لعب ليغو ، يراقب شخصًا
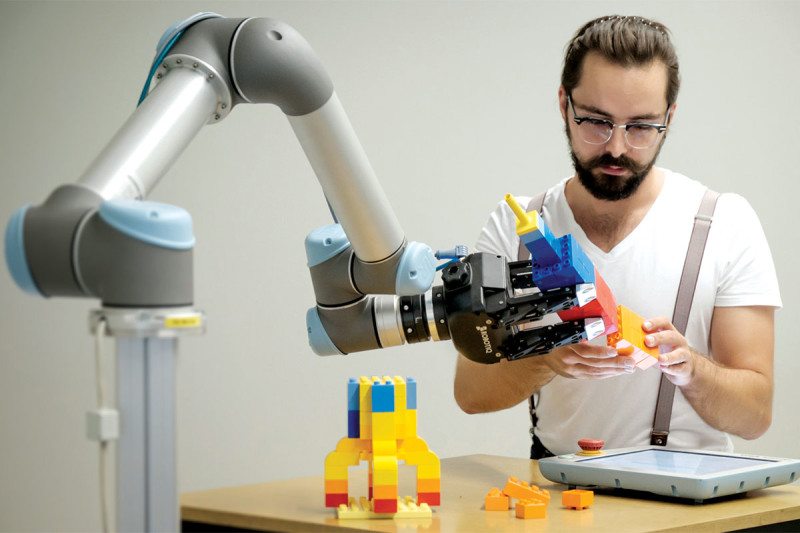 ديفيد فوجت يعلم الروبوت كيفية بناء صاروخ من الطوب ليغو (المصدر: جامعة ولاية أريزونا / TU Freiburg)ديفيد فوجت أستاذ الروبوتات في جامعة فريبرغ للتعدين والتكنولوجيا. لديه ابن يحب لعب Lego ، بالإضافة إلى العديد من التفاصيل حول هذا المنشئ. بمجرد أن جاء عالم بفكرة اختبار إمكانية تدريب الروبوت لتجميع نماذج مختلفة من أجزاء Lego. يقول فوغت : "اعتقدت أنا وابني أنه سيكون من اللطيف إنشاء روبوت يمكنه أن يفعل ما نفعله عندما نلعب " . قرر متخصص مع مجموعة من الزملاء شراء مناور صناعي آلي لمختبره. عند الوصول إلى الأكاديمية ، تم تجهيز الروبوتات بكاميرا Kinect.باستخدام هذه الكاميرا ، يمكن للروبوت مشاهدة الأشخاص الذين يستخدمون علامات لتتبع الحركات ، يجمعون صاروخًا من طوب ليغو. قام الناس بتجميع صاروخ من نفس التصميم عدة مرات ، وتلقى الروبوت تدريجياً المزيد والمزيد من المعلومات حول عملية تجميع هذا الكائن. بعد مرور بعض الوقت ، تمكن من التفاعل مع شريك بشري ، مما ساعد شريكه في تجميع النموذج. في الوقت نفسه ، لم يعثر الروبوت دائمًا على التفاصيل الضرورية حيث يحسب ، لكنه كان يعرف بالفعل كيف يبحث عنها بمفرده. هذا ، وفقًا للخبراء ، هو مجرد مثال واحد لتدريب الروبوتات من خلال توضيح كيفية قيام الشخص بعملية.يتعلم الناس من خلال مراقبة أشخاص آخرين دون الكثير من المتاعب. على سبيل المثال ، يتلقى الأطفال معلومات حول العالم وأفعال الآخرين فقط. لكن برمجة الروبوت لأداء مهمة جديدة أمر صعب للغاية. نحن نفهم بشكل بديهي تمامًا كيفية إكمال مهمة أو أخرى ، ولكن الحدس غير متاح للروبوت - يجب تعيين جميع الإجراءات بدقة باستخدام البرنامج.ولكن الآن ، يحاول أخصائيو الروبوتات إتقان طريقة جديدة لتدريب الروبوتات - وهي طريقة حيث تقوم أنظمة الكمبيوتر بمراقبة الإجراءات البشرية من خلال جمع بيانات المراقبة في قاعدة بيانات. يحاول بعض العلماء التحكم في أفعال الروبوتات باستخدام جهاز كمبيوتر أو هاتف ، في حين يوفر البعض الآخرعنابرهم حرية كاملة في العمل ، مما يسمح لهم بالتعلم من أخطائهم. علاوة على ذلك ، لا يتم تعليم الروبوتات فقط لتجميع الأشياء من Lego. على سبيل المثال ، في العام الماضي ، بدأ علماء من جامعة ماريلاند بتعليم نظامهم للطهي ، مما يسمح لها بمشاهدة مقاطع فيديو الطهي من YouTube. قررتGoogle مؤخرًا إجراء تجربتها الخاصة مع الروبوتات ذاتية التعلم. لهذا ، تم شراء المتلاعبين الصناعيين ، والتي كانت مرتبطة بقاعدة بيانات واحدة. تم تسجيل كل إجراء لأي من الروبوتات ، ثم تمت معالجة هذه البيانات بواسطة شبكة عصبية. بعد التحليل ، تلقى الروبوت تعليمات تصف الخوارزمية المثلى للإجراءات. كان العمل الذي حاولت الأنظمة تدريبه هو فتح باب بمقبض.في إحدى التجارب ، تم توجيه الروبوت لدراسة مجموعة متنوعة من الأشياء. هذه زجاجات مياه ، قرطاسية ، كتب. اعتاد النظام بسرعة على المهمة ونقل المعلومات إلى "الزملاء" حول التسلسل الضروري لأفعالهم. بعد ذلك ، تم إعطاء النظام مهمة جديدة - لنقل كائن معين إلى نقطة معينة. لم يتلق الروبوت أي تعليمات حول خصائص الكائن ، وكانت الكائنات تتغير باستمرار. كما اتضح ، يمكن للروبوتات القيام بهذه المهام بشكل جيد ، باستخدام البيانات المتراكمة أثناء دراسة هذه الأشياء. تمكنت الآلات من حساب عواقب تحريك الجسم على السطح إلى النقطة المطلوبة.أما بالنسبة لفتح الأبواب ، ففي إحدى الحالات قام شخص بمساعدة الروبوتات. تلقت آلات أخرى البيانات اللازمة للتدريب من روبوت يتفاعل مع شريك بشري ، واستخدمت هذه المعلومات لاحقًا لتكرار تصرفات "زميل". كما اتضح ، بمرور الوقت ، تم تدريب الأنظمة بشكل فعال تمامًا عن طريق التجربة والخطأ. بعد أن بدأ المتلاعبون في فتح الأبواب بأنواع مختلفة من المقابض دون مشاكل ، تم تغيير شروط المهمة. على سبيل المثال ، تغير موضع الباب وزاوية فتحه وما إلى ذلك. في التجربة النهائية ، اتضح أن الروبوتات يمكن أن تفتح بابًا وقفلًا دون مساعدة بشرية ، وهو ما لم يواجهوه بعد.يقول أحد مطوري Google: "عندما ننفذ إجراءات معينة ، غالبًا ما نتصرف بشكل حدسي ، ربما يمكننا تمرير هذا الحدس إلى الروبوتات ، ونتيجة لذلك ، نتعلم ونعمل بشكل أسرع".إحدى مشاكل هذا النوع من التدريب على الروبوت هي ترجمة المعلومات إلى نموذج يمكن فهمه بالنسبة للآلة. لا تمتلك معظم الروبوتات أجهزة استشعار تسمح لها بإدراك البيئة والظواهر التي تحدث فيها مثل الإنسان. لذلك ، يجب تكييف هذه المعلومات في كل مرة مع الروبوتات وأنظمة التحكم الخاصة بها. يقول Aude Billard من مدرسة لوزان البوليتكنيك الفيدرالية (سويسرا): "يدرك معلم روبوت جيد أنه يتعامل مع آلة لديها طريقة مختلفة لإدراك الواقع المحيط" .ديفيد فوجت وفريقه واثقون من أن البشر يمكنهم تدريب الروبوتات من خلال إظهار أفعالهم. ربما يمكن استخدام طريقة التدريب هذه في الشركات. وبالتالي ، يمكن تدريب الأنظمة الروبوتية على وظائف جديدة دون استخدام عمل المبرمجين. وهكذا سيكون العامل العادي قادراً على عرض الروبوت ما يجب القيام به ، وسيبدأ في أداء وظيفة جديدة لنفسه.قال فوغت: "من الناحية المثالية ، يجب أن يكون البشر والروبوتات قادرين على القيام بأعمال لا يمكنهم القيام بها بشكل منفصل". سيتم عرض النتائج قريبًا من قبل الأستاذ وزملائه في المؤتمر الدولي للروبوتات البشرية في كانكون بالمكسيك.
ديفيد فوجت يعلم الروبوت كيفية بناء صاروخ من الطوب ليغو (المصدر: جامعة ولاية أريزونا / TU Freiburg)ديفيد فوجت أستاذ الروبوتات في جامعة فريبرغ للتعدين والتكنولوجيا. لديه ابن يحب لعب Lego ، بالإضافة إلى العديد من التفاصيل حول هذا المنشئ. بمجرد أن جاء عالم بفكرة اختبار إمكانية تدريب الروبوت لتجميع نماذج مختلفة من أجزاء Lego. يقول فوغت : "اعتقدت أنا وابني أنه سيكون من اللطيف إنشاء روبوت يمكنه أن يفعل ما نفعله عندما نلعب " . قرر متخصص مع مجموعة من الزملاء شراء مناور صناعي آلي لمختبره. عند الوصول إلى الأكاديمية ، تم تجهيز الروبوتات بكاميرا Kinect.باستخدام هذه الكاميرا ، يمكن للروبوت مشاهدة الأشخاص الذين يستخدمون علامات لتتبع الحركات ، يجمعون صاروخًا من طوب ليغو. قام الناس بتجميع صاروخ من نفس التصميم عدة مرات ، وتلقى الروبوت تدريجياً المزيد والمزيد من المعلومات حول عملية تجميع هذا الكائن. بعد مرور بعض الوقت ، تمكن من التفاعل مع شريك بشري ، مما ساعد شريكه في تجميع النموذج. في الوقت نفسه ، لم يعثر الروبوت دائمًا على التفاصيل الضرورية حيث يحسب ، لكنه كان يعرف بالفعل كيف يبحث عنها بمفرده. هذا ، وفقًا للخبراء ، هو مجرد مثال واحد لتدريب الروبوتات من خلال توضيح كيفية قيام الشخص بعملية.يتعلم الناس من خلال مراقبة أشخاص آخرين دون الكثير من المتاعب. على سبيل المثال ، يتلقى الأطفال معلومات حول العالم وأفعال الآخرين فقط. لكن برمجة الروبوت لأداء مهمة جديدة أمر صعب للغاية. نحن نفهم بشكل بديهي تمامًا كيفية إكمال مهمة أو أخرى ، ولكن الحدس غير متاح للروبوت - يجب تعيين جميع الإجراءات بدقة باستخدام البرنامج.ولكن الآن ، يحاول أخصائيو الروبوتات إتقان طريقة جديدة لتدريب الروبوتات - وهي طريقة حيث تقوم أنظمة الكمبيوتر بمراقبة الإجراءات البشرية من خلال جمع بيانات المراقبة في قاعدة بيانات. يحاول بعض العلماء التحكم في أفعال الروبوتات باستخدام جهاز كمبيوتر أو هاتف ، في حين يوفر البعض الآخرعنابرهم حرية كاملة في العمل ، مما يسمح لهم بالتعلم من أخطائهم. علاوة على ذلك ، لا يتم تعليم الروبوتات فقط لتجميع الأشياء من Lego. على سبيل المثال ، في العام الماضي ، بدأ علماء من جامعة ماريلاند بتعليم نظامهم للطهي ، مما يسمح لها بمشاهدة مقاطع فيديو الطهي من YouTube. قررتGoogle مؤخرًا إجراء تجربتها الخاصة مع الروبوتات ذاتية التعلم. لهذا ، تم شراء المتلاعبين الصناعيين ، والتي كانت مرتبطة بقاعدة بيانات واحدة. تم تسجيل كل إجراء لأي من الروبوتات ، ثم تمت معالجة هذه البيانات بواسطة شبكة عصبية. بعد التحليل ، تلقى الروبوت تعليمات تصف الخوارزمية المثلى للإجراءات. كان العمل الذي حاولت الأنظمة تدريبه هو فتح باب بمقبض.في إحدى التجارب ، تم توجيه الروبوت لدراسة مجموعة متنوعة من الأشياء. هذه زجاجات مياه ، قرطاسية ، كتب. اعتاد النظام بسرعة على المهمة ونقل المعلومات إلى "الزملاء" حول التسلسل الضروري لأفعالهم. بعد ذلك ، تم إعطاء النظام مهمة جديدة - لنقل كائن معين إلى نقطة معينة. لم يتلق الروبوت أي تعليمات حول خصائص الكائن ، وكانت الكائنات تتغير باستمرار. كما اتضح ، يمكن للروبوتات القيام بهذه المهام بشكل جيد ، باستخدام البيانات المتراكمة أثناء دراسة هذه الأشياء. تمكنت الآلات من حساب عواقب تحريك الجسم على السطح إلى النقطة المطلوبة.أما بالنسبة لفتح الأبواب ، ففي إحدى الحالات قام شخص بمساعدة الروبوتات. تلقت آلات أخرى البيانات اللازمة للتدريب من روبوت يتفاعل مع شريك بشري ، واستخدمت هذه المعلومات لاحقًا لتكرار تصرفات "زميل". كما اتضح ، بمرور الوقت ، تم تدريب الأنظمة بشكل فعال تمامًا عن طريق التجربة والخطأ. بعد أن بدأ المتلاعبون في فتح الأبواب بأنواع مختلفة من المقابض دون مشاكل ، تم تغيير شروط المهمة. على سبيل المثال ، تغير موضع الباب وزاوية فتحه وما إلى ذلك. في التجربة النهائية ، اتضح أن الروبوتات يمكن أن تفتح بابًا وقفلًا دون مساعدة بشرية ، وهو ما لم يواجهوه بعد.يقول أحد مطوري Google: "عندما ننفذ إجراءات معينة ، غالبًا ما نتصرف بشكل حدسي ، ربما يمكننا تمرير هذا الحدس إلى الروبوتات ، ونتيجة لذلك ، نتعلم ونعمل بشكل أسرع".إحدى مشاكل هذا النوع من التدريب على الروبوت هي ترجمة المعلومات إلى نموذج يمكن فهمه بالنسبة للآلة. لا تمتلك معظم الروبوتات أجهزة استشعار تسمح لها بإدراك البيئة والظواهر التي تحدث فيها مثل الإنسان. لذلك ، يجب تكييف هذه المعلومات في كل مرة مع الروبوتات وأنظمة التحكم الخاصة بها. يقول Aude Billard من مدرسة لوزان البوليتكنيك الفيدرالية (سويسرا): "يدرك معلم روبوت جيد أنه يتعامل مع آلة لديها طريقة مختلفة لإدراك الواقع المحيط" .ديفيد فوجت وفريقه واثقون من أن البشر يمكنهم تدريب الروبوتات من خلال إظهار أفعالهم. ربما يمكن استخدام طريقة التدريب هذه في الشركات. وبالتالي ، يمكن تدريب الأنظمة الروبوتية على وظائف جديدة دون استخدام عمل المبرمجين. وهكذا سيكون العامل العادي قادراً على عرض الروبوت ما يجب القيام به ، وسيبدأ في أداء وظيفة جديدة لنفسه.قال فوغت: "من الناحية المثالية ، يجب أن يكون البشر والروبوتات قادرين على القيام بأعمال لا يمكنهم القيام بها بشكل منفصل". سيتم عرض النتائج قريبًا من قبل الأستاذ وزملائه في المؤتمر الدولي للروبوتات البشرية في كانكون بالمكسيك.Source: https://habr.com/ru/post/ar398751/
All Articles