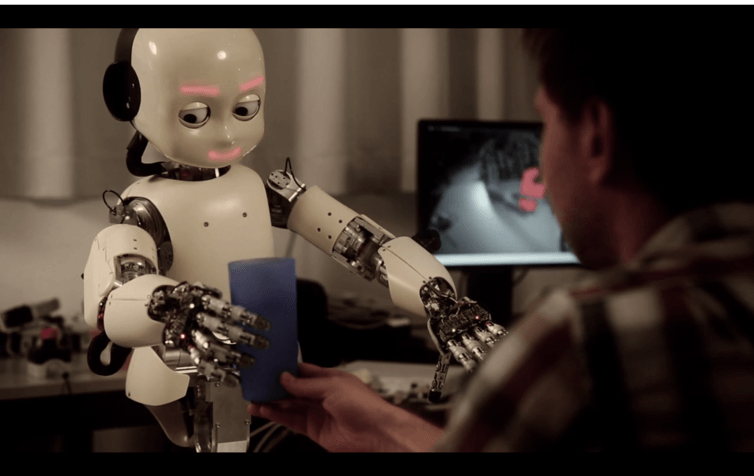
 تخيل أن صديقك يطلب منك المساعدة في تنظيف غرفته المليئة بالأشياء والأثاث المختلفة. لكن تخيل أيضًا أنه لن يساعدك في ذلك ، ولكن ببساطة يصف لك ، ويعرض الصور ، وكيف يرغب في أن تبدو غرفته في النهاية. قد تبدو المهمة مملة ، لكن أي منا سيتعامل معها. عندما كنا أطفالا ، اكتشفنا أشياء جديدة وتعلمنا التعرف عليها وطورنا مهارات في التعامل معها. بدافع الفضول ، طورنا تدريجيًا المعرفة البصرية واليقظة والحسية الحركية ، مما يسمح لنا ، البالغين ، بمعالجة بيئتنا المادية التي نختارها.الروبوتات اليوم ليست مهيأة لمثل هذه المهام. تخيل روبوتًا بشريًا يساعد في ترتيب الغرفة. لنفترض أنك عرضت على الروبوت غرفة في حالة طبيعية ونظيفة ، وعندما تكون هناك فوضى فيها ، فإنك تأمر الروبوت بإزالتها إلى حالتها الأصلية. في مثل هذه الظروف ، سيكون من الصعب جدًا تعليم الروبوت إلى أين يوجه الانتباه وكيفية التعامل مع كل من الأشياء من أجل وضعها في الموضع الصحيح في المكان المناسب ، أو كيفية بناء سلسلة من الإجراءات.وعلى الرغم من ظهور روبوتات جديدة معقدة وخوارزميات متقدمة سنويًا ، إلا أن أداء واجبات معقدة وإيجاد حلول غير معروفة للمهام المختلفة يتطلب برمجة مملة للتفاصيل المتعلقة بالمهارات الحركية ذات المستوى الأدنى. في أحسن الأحوال ، يمكن للروبوتات تعلم مجموعة صغيرة من الإجراءات غير المرنة. بمقارنة الإنجازات الحالية للذكاء الاصطناعي بالذكاء البيولوجي ، سنرى أن الذكاء الاصطناعي لا يزال له قيود في الاستقلالية والمرونة.ستحتاج روبوتات المستقبل إلى أن تكون قادرة على التعلم لفهم محيطها بشكل مستقل ، أي تحديد الأهداف بشكل مستقل واكتساب المهارات بشكل فعال لتحقيقها ، بناءً على اكتساب وتعديل وتعميم وإعادة دمج المعارف والمهارات المكتسبة سابقًا. سيسمح لهم ذلك ، مع القليل من التدريب الإضافي ، بتغيير بيئتهم من الحالة الحالية إلى مجموعة واسعة من الحالات النهائية التي حددها المستخدم كهدف. السؤال هو ، كيف يمكننا إنشاء روبوتات للمستقبل يمكنها التعامل مع مثل هذه المهمة؟
تخيل أن صديقك يطلب منك المساعدة في تنظيف غرفته المليئة بالأشياء والأثاث المختلفة. لكن تخيل أيضًا أنه لن يساعدك في ذلك ، ولكن ببساطة يصف لك ، ويعرض الصور ، وكيف يرغب في أن تبدو غرفته في النهاية. قد تبدو المهمة مملة ، لكن أي منا سيتعامل معها. عندما كنا أطفالا ، اكتشفنا أشياء جديدة وتعلمنا التعرف عليها وطورنا مهارات في التعامل معها. بدافع الفضول ، طورنا تدريجيًا المعرفة البصرية واليقظة والحسية الحركية ، مما يسمح لنا ، البالغين ، بمعالجة بيئتنا المادية التي نختارها.الروبوتات اليوم ليست مهيأة لمثل هذه المهام. تخيل روبوتًا بشريًا يساعد في ترتيب الغرفة. لنفترض أنك عرضت على الروبوت غرفة في حالة طبيعية ونظيفة ، وعندما تكون هناك فوضى فيها ، فإنك تأمر الروبوت بإزالتها إلى حالتها الأصلية. في مثل هذه الظروف ، سيكون من الصعب جدًا تعليم الروبوت إلى أين يوجه الانتباه وكيفية التعامل مع كل من الأشياء من أجل وضعها في الموضع الصحيح في المكان المناسب ، أو كيفية بناء سلسلة من الإجراءات.وعلى الرغم من ظهور روبوتات جديدة معقدة وخوارزميات متقدمة سنويًا ، إلا أن أداء واجبات معقدة وإيجاد حلول غير معروفة للمهام المختلفة يتطلب برمجة مملة للتفاصيل المتعلقة بالمهارات الحركية ذات المستوى الأدنى. في أحسن الأحوال ، يمكن للروبوتات تعلم مجموعة صغيرة من الإجراءات غير المرنة. بمقارنة الإنجازات الحالية للذكاء الاصطناعي بالذكاء البيولوجي ، سنرى أن الذكاء الاصطناعي لا يزال له قيود في الاستقلالية والمرونة.ستحتاج روبوتات المستقبل إلى أن تكون قادرة على التعلم لفهم محيطها بشكل مستقل ، أي تحديد الأهداف بشكل مستقل واكتساب المهارات بشكل فعال لتحقيقها ، بناءً على اكتساب وتعديل وتعميم وإعادة دمج المعارف والمهارات المكتسبة سابقًا. سيسمح لهم ذلك ، مع القليل من التدريب الإضافي ، بتغيير بيئتهم من الحالة الحالية إلى مجموعة واسعة من الحالات النهائية التي حددها المستخدم كهدف. السؤال هو ، كيف يمكننا إنشاء روبوتات للمستقبل يمكنها التعامل مع مثل هذه المهمة؟GOAL- مشروع الروبوتات
, – , (
Laboratory of Computational Embodied Neuroscience, LOCEN), , , (
ISTC-CNR).
"
GOAL-Robots – " [Goal-based Open-ended Autonomous Learning Robots] 11 , 800
EU FET-OPEN call(Future Emergent Technologies) ، وهو جزء من برنامج البحوث Horizon 2020 EU. ستقوم LOCEN ومشرفها البحثي ، Gianluca Baldassarre ، بتنسيق تحالف يضم ثلاث مجموعات بحثية أوروبية مهمة:1. مختبر علم النفس والإدراك (LPP) من فرنسا ، بقيادة كيفين أوريجان ، يعمل في معهد باريس لعلم الأعصاب والعلوم المعرفية يدعى ديكارت ، سيجري التجارب المتعلقة باكتساب المهارات والأهداف لدى الأطفال.2. سيركز معهد فرانكفورت للدراسات المتقدمة (FIAS) في ألمانيا ، تحت قيادة Jochen Triesch ، على تطوير النظم البصرية والمهارات الحركية المشابهة للأنظمة البيولوجية.3.سيقوم فريق من خبراء الروبوتات بقيادة Jan Peters ، جامعة دارمشتات للتكنولوجيا (TUDa) في ألمانيا ، بعرض الروبوتات للمشروع.تتبع GOAL-Robots المشروع الأوروبي السابق IM-CLeVeR ("الروبوتات العالمية التراكمية ذات الدوافع الداخلية") ، حيث درس LOCEN وشركاؤه السابقون دور الدافع الجوهري (VM) في حث التعلم الذاتي في الكائنات الحية وفي الروبوتات. بدأ بحث VM بملاحظة كيفية استكشاف الأطفال والتفاعل مع العالم الخارجي ، بدافع الفضول ، واكتساب المعرفة حول كيفية عمل الأشياء ، واكتساب مجموعة كبيرة من المهارات الحسية الحركية للتفاعل معها. إذا كان الفضول والـ VMs أساسًا للعالمية البشرية والقدرة على التكيف ، فإن الذكاء الاصطناعي مع الهندسة والخوارزمية التي تحاكي VMs يمكن أن تساعد في إنشاء "محرك تحفيزي" يوجه الروبوتات من خلال عملية تعلم مفتوحة مستقلة لا تتطلب برمجة مستمرة وتدريبًا بشريًا.تضيف GOAL-Robots أيضًا مكونًا مهمًا لتطوير تدريب الروبوتات المفتوحة: الأهداف. الهدف هو تمثيل داخلي لشخص حول العالم ، أو حالة جسم أو حدث ، أو مجموعة من الأحداث ، التي لها خاصيتان مهمتان. أولاً ، يمكن للشخص أن يتسبب في هذه الفكرة حتى في حالة عدم إدراك الحالة المقابلة للعالم أو الحدث. ثانيًا ، هذا التحدي له تأثير تحفيزي ، أي أنه يمكن أن يؤثر على الاختيار ، مع التركيز على الشخصية والسلوك ، ويقود عملية التعلم إلى تحقيق الهدف. تعد القدرة على إنشاء أهداف تحفيزية كما تشاء ، وإن كانت مجردة ، واستخدامها لاختيار الإجراءات والتدريب ، عنصرًا رئيسيًا في المرونة السلوكية والقدرة على تدريب الأفراد البيولوجيين. يعتقد المشاركون في المشروعأن تزويد الروبوتات بآليات مناسبة لتشكيل ومتابعة أهداف التدريب سيزيد بشكل كبير من قدرتهم على التعلم المستقل.
إذا كان الفضول والـ VMs أساسًا للعالمية البشرية والقدرة على التكيف ، فإن الذكاء الاصطناعي مع الهندسة والخوارزمية التي تحاكي VMs يمكن أن تساعد في إنشاء "محرك تحفيزي" يوجه الروبوتات من خلال عملية تعلم مفتوحة مستقلة لا تتطلب برمجة مستمرة وتدريبًا بشريًا.تضيف GOAL-Robots أيضًا مكونًا مهمًا لتطوير تدريب الروبوتات المفتوحة: الأهداف. الهدف هو تمثيل داخلي لشخص حول العالم ، أو حالة جسم أو حدث ، أو مجموعة من الأحداث ، التي لها خاصيتان مهمتان. أولاً ، يمكن للشخص أن يتسبب في هذه الفكرة حتى في حالة عدم إدراك الحالة المقابلة للعالم أو الحدث. ثانيًا ، هذا التحدي له تأثير تحفيزي ، أي أنه يمكن أن يؤثر على الاختيار ، مع التركيز على الشخصية والسلوك ، ويقود عملية التعلم إلى تحقيق الهدف. تعد القدرة على إنشاء أهداف تحفيزية كما تشاء ، وإن كانت مجردة ، واستخدامها لاختيار الإجراءات والتدريب ، عنصرًا رئيسيًا في المرونة السلوكية والقدرة على تدريب الأفراد البيولوجيين. يعتقد المشاركون في المشروعأن تزويد الروبوتات بآليات مناسبة لتشكيل ومتابعة أهداف التدريب سيزيد بشكل كبير من قدرتهم على التعلم المستقل.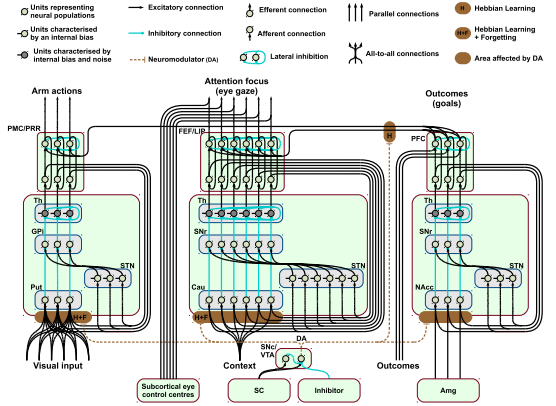
المهام والأفكار
تتكون فكرة المشروع من مزيج من الآليات المتعلقة بآلية تحفيز العضلات وأهداف القوة. على وجه الخصوص ، سوف تحفز VM الروبوتات على اكتشاف الأحداث الجديدة المثيرة للاهتمام التي حدثت بسبب تصرفاتهم بشكل مستقل. سوف تستكشف الروبوتات محيطها تحت تأثير الفضول وتضع بشكل مستقل أهدافًا أكثر تعقيدًا ، وتستخدمها للحصول على مهارات مختلفة بأسلوب مفتوح. تتطلب العملية المفتوحة لاكتساب القدرات آليات معقدة ودمج مكونات معمارية مختلفة. على وجه الخصوص ، ستحتاج الروبوتات إلى اكتساب مهارات جديدة دون كسر المهارات المكتسبة مسبقًا ، وفي الوقت نفسه ، إعادة استخدام المهارات المكتسبة مسبقًا لتسريع اكتساب مهارات جديدة (نقل المعرفة). بالإضافة إلى ذلك ، سيحتاجون إلى تعلم كيفية الجمع بين المهارات المكتسبة مسبقًا لإنشاء مهارات أكثر تعقيدًا. هذه هي أهم تحديات الذكاء الاصطناعي اليوم. لحلها ، سيستخدم المشروع خوارزميات متقدمة ، سواء لمعالجة المعلومات الحسية (على سبيل المثال ، استخدام شبكات التعلم العميق) ولتنظيم واستخدام المعرفة المتعلقة بالمهارات الحركية (على سبيل المثال ، استخدام بدائل الحركة الديناميكية والشبكات العصبية ذات تأثير الصدى [صدى شبكات الدول العصبية]).يجب دمج جميع الآليات المرتبطة بأجزاء مختلفة من عملية التعلم في بنية تحكم واحدة: سيتم دمج عمليات تشكيل الهدف عالية المستوى مع طبقات تحفيزية ، حيث يقوم الروبوت ، بناءً على VM ، بتشكيل وتحديد الأهداف. سيتم ربط الأهداف تدريجيًا مع المستوى الأدنى من وحدات التحكم بحيث يمكن للروبوت أن يتذكر المهارات المكتسبة لتحقيق الأهداف المرجوة وبناء مهارات أكثر تعقيدًا بناءً على مجموعة من الأهداف السابقة. سيتم دمج نقل المعرفة بين المهارات المختلفة مع مراعاة الحاجة إلى القضاء على التدخل المتبادل ، وهلم جرا. هذه الآليات مفيدة ليس فقط لمرحلة التعلم المستقل ، ولكن أيضًا لإمكانية استخدام المعرفة المكتسبة من قبل المستخدم.
تتطلب العملية المفتوحة لاكتساب القدرات آليات معقدة ودمج مكونات معمارية مختلفة. على وجه الخصوص ، ستحتاج الروبوتات إلى اكتساب مهارات جديدة دون كسر المهارات المكتسبة مسبقًا ، وفي الوقت نفسه ، إعادة استخدام المهارات المكتسبة مسبقًا لتسريع اكتساب مهارات جديدة (نقل المعرفة). بالإضافة إلى ذلك ، سيحتاجون إلى تعلم كيفية الجمع بين المهارات المكتسبة مسبقًا لإنشاء مهارات أكثر تعقيدًا. هذه هي أهم تحديات الذكاء الاصطناعي اليوم. لحلها ، سيستخدم المشروع خوارزميات متقدمة ، سواء لمعالجة المعلومات الحسية (على سبيل المثال ، استخدام شبكات التعلم العميق) ولتنظيم واستخدام المعرفة المتعلقة بالمهارات الحركية (على سبيل المثال ، استخدام بدائل الحركة الديناميكية والشبكات العصبية ذات تأثير الصدى [صدى شبكات الدول العصبية]).يجب دمج جميع الآليات المرتبطة بأجزاء مختلفة من عملية التعلم في بنية تحكم واحدة: سيتم دمج عمليات تشكيل الهدف عالية المستوى مع طبقات تحفيزية ، حيث يقوم الروبوت ، بناءً على VM ، بتشكيل وتحديد الأهداف. سيتم ربط الأهداف تدريجيًا مع المستوى الأدنى من وحدات التحكم بحيث يمكن للروبوت أن يتذكر المهارات المكتسبة لتحقيق الأهداف المرجوة وبناء مهارات أكثر تعقيدًا بناءً على مجموعة من الأهداف السابقة. سيتم دمج نقل المعرفة بين المهارات المختلفة مع مراعاة الحاجة إلى القضاء على التدخل المتبادل ، وهلم جرا. هذه الآليات مفيدة ليس فقط لمرحلة التعلم المستقل ، ولكن أيضًا لإمكانية استخدام المعرفة المكتسبة من قبل المستخدم. في كل عام ، سيقدم المشروع "روبوتًا توضيحيًا" ، وستعمل المنصات الروبوتية المعقدة (مثل iCub أو Kuka) على هندسة البنى المطورة في المشروع لحل مشاكل التعقيد المتزايد. لن يظهر هؤلاء المتظاهرون التقدم المحرز في المشروع فحسب ، بل سيصبحون أيضًا معايير لمقارنة التقدم المحرز في تطوير الروبوتات المستقلة.سيتعين على المتظاهر النهائي أن يواجه المهمة التي صيغت في بداية المقال: هل من الممكن للروبوت أن يثبت العالمية والقدرة على التكيف على غرار الإنسان ، والتفاعل مع العالم الحقيقي؟ على وجه الخصوص ، سيتم تكليف الروبوتات بالمهمة: أ) لدراسة موضع العديد من الأشياء الموجودة في الحاويات وعلى الرفوف المقابلة للترتيب ، و ب) إعادة إنتاج هذه الحالة بعد أن يقوم المستخدم بتحريك الأشياء وتبديلها.إذا كان مشروع GOAL-Robots يفي بوعوده ، فلن تحتاج بعد الآن إلى القلق بشأن الأصدقاء الكسولين: عندما يطلبون منك المساعدة ، ما عليك سوى أن تطلب من أصدقائك الاصطناعيين مساعدتهم!
في كل عام ، سيقدم المشروع "روبوتًا توضيحيًا" ، وستعمل المنصات الروبوتية المعقدة (مثل iCub أو Kuka) على هندسة البنى المطورة في المشروع لحل مشاكل التعقيد المتزايد. لن يظهر هؤلاء المتظاهرون التقدم المحرز في المشروع فحسب ، بل سيصبحون أيضًا معايير لمقارنة التقدم المحرز في تطوير الروبوتات المستقلة.سيتعين على المتظاهر النهائي أن يواجه المهمة التي صيغت في بداية المقال: هل من الممكن للروبوت أن يثبت العالمية والقدرة على التكيف على غرار الإنسان ، والتفاعل مع العالم الحقيقي؟ على وجه الخصوص ، سيتم تكليف الروبوتات بالمهمة: أ) لدراسة موضع العديد من الأشياء الموجودة في الحاويات وعلى الرفوف المقابلة للترتيب ، و ب) إعادة إنتاج هذه الحالة بعد أن يقوم المستخدم بتحريك الأشياء وتبديلها.إذا كان مشروع GOAL-Robots يفي بوعوده ، فلن تحتاج بعد الآن إلى القلق بشأن الأصدقاء الكسولين: عندما يطلبون منك المساعدة ، ما عليك سوى أن تطلب من أصدقائك الاصطناعيين مساعدتهم!