لسبب ما ، قلة من الناس في روسيا يعرفون الوضع الحقيقي باستخدام الروبوتات المختلفة في موقع الطوارئ في فوكوشيما NPP. لدى عامة الناس صورة نمطية لا لبس فيها:

في الواقع ، في أعمال مختلفة أثناء تصفية عواقب الحادث في Fukushima NPP (ربما سأكتب المزيد من أجل FAE) ، تم استخدام مئات الوحدات من مختلف الروبوتات التي يتم التحكم فيها عن بُعد ويتم استخدامها. إن نطاق استخدام السيارات التي يتم التحكم فيها عن بعد أكبر بشكل لا مثيل له مما كان عليه في محطة تشيرنوبيل للطاقة النووية ، وذلك للأسباب البسيطة التي تطورت جميع هذه المعدات بسرعة على مدى الثلاثين عامًا الماضية ولأن الحادث في محطة تشيرنوبيل للطاقة النووية منتشر على نطاق أوسع مما كان عليه في محطة تشيرنوبيل للطاقة النووية.
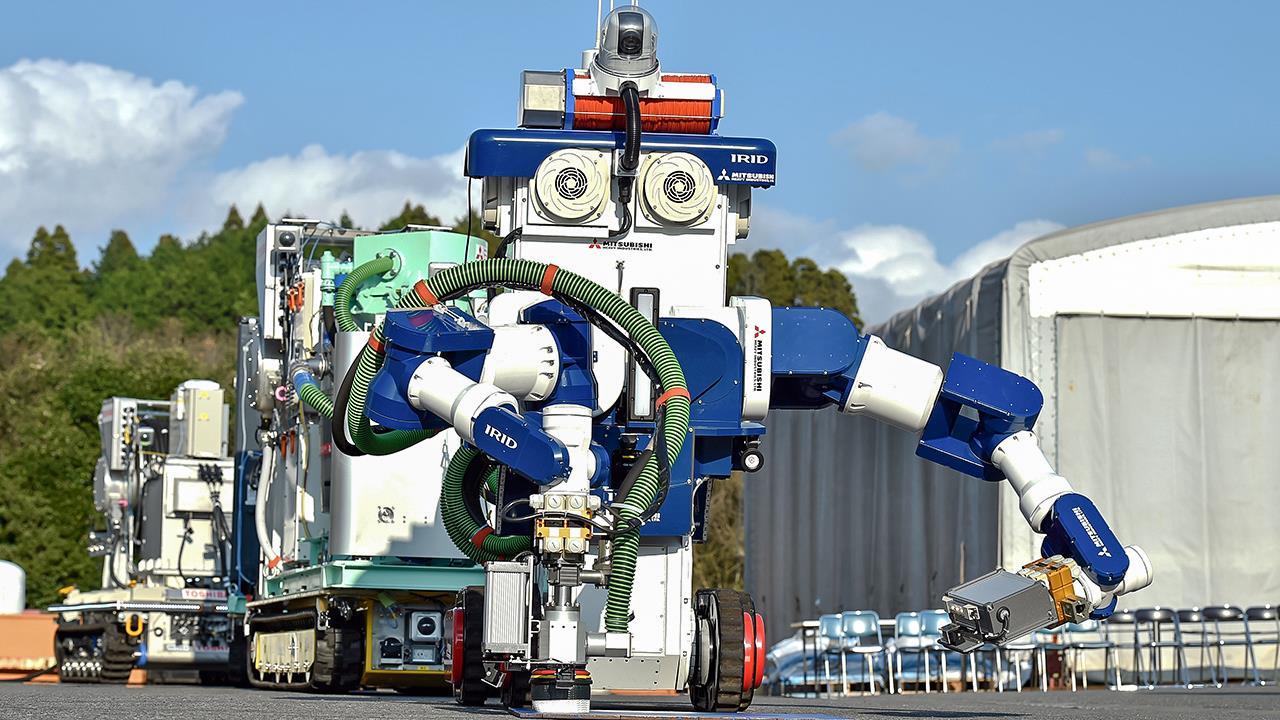 مكنسة كهربائية روبوتية ، الإصدار الياباني لفوكوشيما.
مكنسة كهربائية روبوتية ، الإصدار الياباني لفوكوشيما.قبل النظر إلى الروبوتات ، يجدر على الأقل بشكل عام أن تتخيل أن العمل قد تم في FAES على مدى السنوات الست الماضية منذ الحادث.
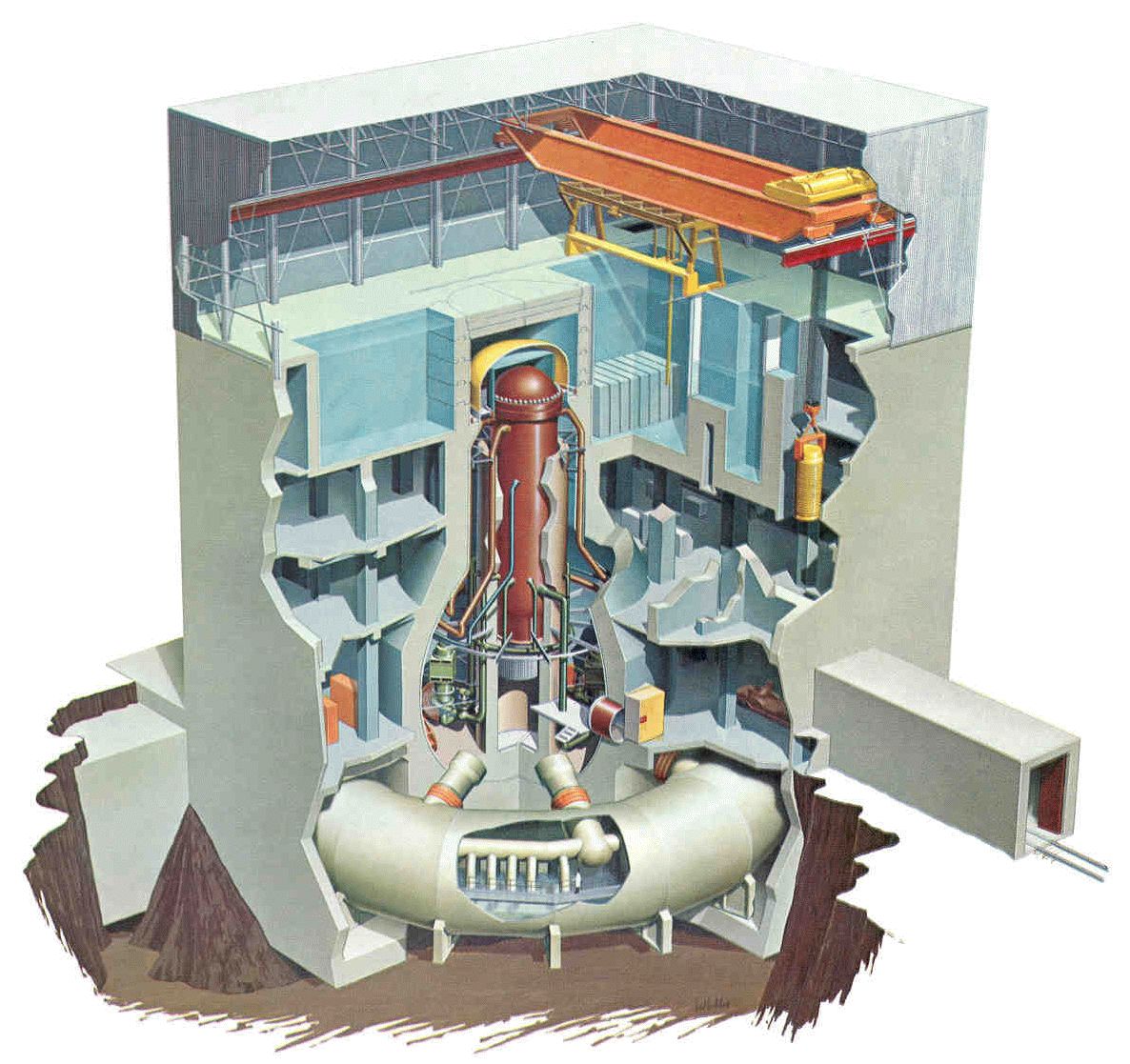 تعطي هذه الصورة المبسطة فكرة عامة عن تصميم كتل Fukushima NPP: يقع المفاعل هنا في الوسط (البني) في وسط حاوية خرسانية على شكل كمثرى ، يوجد داخلها الكثير من المعدات. يوجد في أعلى يمين المفاعل تجمع قابض ، أسفل المفاعل مباشرة توجد غرفة لمحركات التحكم وقضبان الحماية (على عكس PWR ، يتم إدخالها في AZ من الأسفل في BWR ). يوجد أسفل المفاعل وحوله تجمع فقاعات حلقي مصمم لتكثيف البخار في حالة حدوث تمزق كبير في وعاء المفاعل الرئيسي.
تعطي هذه الصورة المبسطة فكرة عامة عن تصميم كتل Fukushima NPP: يقع المفاعل هنا في الوسط (البني) في وسط حاوية خرسانية على شكل كمثرى ، يوجد داخلها الكثير من المعدات. يوجد في أعلى يمين المفاعل تجمع قابض ، أسفل المفاعل مباشرة توجد غرفة لمحركات التحكم وقضبان الحماية (على عكس PWR ، يتم إدخالها في AZ من الأسفل في BWR ). يوجد أسفل المفاعل وحوله تجمع فقاعات حلقي مصمم لتكثيف البخار في حالة حدوث تمزق كبير في وعاء المفاعل الرئيسي.بعد جلب مفاعلات الكتل 1،2،3 إلى حالة "الإغلاق البارد" (أي تبريد الوقود المستهلك في المفاعل إلى 100 درجة مئوية أو أقل) في نهاية 11 عامًا ، تم
صياغة المهام التالية:
- استطلاع حالة الإشعاع في الأماكن التي يصعب الوصول إليها - وعاء المفاعل ، والحاوية ، وكبش توري وغيرها ، حيث لم يكن الوضع معروفًا بحلول نهاية عام 2011 (بشكل أساسي مع بقايا الوقود المنصهر)
- الحد من تدفق الرياح والمياه من النشاط الإشعاعي من المفاعلات - عن طريق إزالة التسربات (بما في ذلك الجدار الجليدي سيئ السمعة) ، وألواح جزء من جدران المباني ، وجمع القمامة الملوثة في حاويات حيث لم يتم ذلك بعد
- تحضير مواقع لتفريغ SNF من برك التخزين لجميع الكتل الأربعة - تنظيف الهياكل المدمرة ، ورسم خرائط الحطام في برك التخزين وتنظيفها ، وتنظيم الهياكل المؤقتة فوق البرك ، وأخيرًا - تفريغ SNF في حاويات
- الحد الأقصى من التلوث للمنشآت (أي تنظيف الملوثات السطحية. يعد هذا ضروريًا بشكل أساسي لصالح أعمال إزالة SNF - لتقليل مستوى جرعة الأفراد الذين سيقومون بهذا العمل
- إغلاق حاويات المفاعل والضخ اللاحق للمياه المشعة من مباني وحدات الطاقة
- تفكيك بقايا الوقود المنصهر عالي الإشعاع (كوريوم) في 1،2،3 كتل
- بعد تحرير الكتل من الأشياء الخطرة النووية والإشعاعية - تفكيك وتنظيم "المنطقة الخضراء"
 الرسوم البيانية من كتل في بداية عام 2016.
الرسوم البيانية من كتل في بداية عام 2016.من المفترض أن يتم تنفيذ الخطة بأكملها في 30-40 سنة ، والأكثر صعوبة هنا هو تفريغ الوقود النووي المستنفد من برك التخزين المليئة بالحطام وإزالة الكوريوم من بقايا أوعية المفاعل. في الوقت الحالي ، يتم تفريغ SNF تمامًا من الكتلة 4 (حيث ، لحسن الحظ ، لم يكن في المفاعل ، ولكن فقط في حوض التخزين - أي ، يمكن تحويل الكتلة 4 إلى حديقة خضراء قريبًا بما فيه الكفاية) ، وبناء قشرة واقية لنهاية التفريغ SNF من الكتلة 3 ، من المخطط أن تبدأ في عام 2017.
مع الكتل 1،2 ، فإن الوضع هو الأصعب - هنا لبناء ملجأ لتنظيف SNF ، من الضروري أولاً تفكيك الحطام وإزالة التلوث جزئيًا لتقليل الحقول ، وهو ما تقوم به TEPCO (مالك محطة الطاقة النووية) الآن.
 منظر عام لموقع فوكوشيما NPP في عام 2016. بالمناسبة ، هناك خطة جيدة تشرح كل هذه الدبابات وبعض المباني.
منظر عام لموقع فوكوشيما NPP في عام 2016. بالمناسبة ، هناك خطة جيدة تشرح كل هذه الدبابات وبعض المباني.لذا ، تشارك الروبوتات في جميع الأعمال الموصوفة أعلاه على الإطلاق. نعم ، بالطبع ، هذه كلها آلات يتم التحكم فيها عن بعد ، خاصةً الكابلات ، لن أخوض في المناقشة حول المصطلحات هنا ، واعتبر هذه المعدات روبوتات ، أو مستقلة فقط ، وسأطلق عليها الروبوتات.
 iRobot Packbot 510 هو الأول من بين تلك المستخدمة في FAES.
iRobot Packbot 510 هو الأول من بين تلك المستخدمة في FAES.منذ الأيام الأولى للحادث ، الذي لا يزال من جانبه النشط ، نشأ السؤال عن الاستخبارات الإشعاعية. تمتلك شركة TEPCO بعض أسطول الروبوتات iRobot Packbot - وهي آلة كبيرة الحجم ومناسبة تمامًا لهذه الأغراض. يضعون مقاييس الجرعات على pakbots (يبدو أن هذا هو أحد الخيارات القياسية بشكل عام) ، وكاميرات غاما ، والضغط ، ودرجة الحرارة ، وأجهزة استشعار الرطوبة ، وإرسالها إلى وحول الكتل التي دمرتها الانفجارات. لسوء الحظ ، كان كل شيء سيئًا مع pakbots أثناء التحرك حول السلالم ، وأجروا استطلاعًا في الطابق الأرضي وخارج الكتل.
تدريب أبريل في موقع FNPP مع الروبوت المحارب iRobot.بعد مرور بعض الوقت ، تمت إضافة العديد من الروبوتات (ذات التصميم المماثل) التي طورها مركز FuRO وجامعة Chiba - Quince و Hibiscus و Sakura ، وما إلى ذلك ، وفقًا للمطورين الذين لديهم أفضل ذكاء / ميكانيكي عند التحرك حول التضاريس الصعبة. في الواقع ، سمحت هذه الروبوتات بالفعل في أبريل ومايو 2011 باستكشاف الطوابق العليا من الكتل ، وفقد اثنان منهم بسبب انقطاع الكابلات.
سفرجل في الاستطلاع داخل الوحدة الثانية في فوكوشيما الحزب الوطني الجديد ، أبريل-يوليو 2011.بالإضافة إلى ذلك ، تم استخدام طائرة بدون طيار واحدة على الأقل من هانيويل T-HAWK قدمها الجيش الياباني للاستطلاع والمراقبة الجوية. كان الجيش والعديد من الروبوتات الزاحفة الأخرى مثل تالون سخية أيضًا. هذه نسخة أثقل وأكثر أمانًا في إيديولوجية Packbot.

بالإضافة إلى الاستطلاع ، على الفور تقريبًا ، في الأسابيع الأولى ، لإزالة الأنقاض ، بدأ استخدام معدات البناء المعاد التحكم بها المعاد تشكيلها - العديد من الحفارات والجرافات والشاحنات ، والتي نجحت في تنظيف الممرات بين الكتل من الحطام المشع.
 الروبوتات المستخدمة لتنظيف النفايات المشعة في المربع 3 في مايو ويونيو 2011. بما في ذلك اثنين التقليدية للصناعة النووية Brokk'a
الروبوتات المستخدمة لتنظيف النفايات المشعة في المربع 3 في مايو ويونيو 2011. بما في ذلك اثنين التقليدية للصناعة النووية Brokk'aتم العثور على تطبيق مثير للاهتمام لمضخات الخرسانة الروبوتية Putzmeister - صب الماء من فوق الكتل ومراقبة الوضع من طفرة 70 مترا. تمت إدارة هذه الآلات عبر الهواء من غرف متنقلة محمية بالرصاص ، تم تركيبها بالقرب من مكان العمل.
 بوتزميستر التي يتم التحكم فيها عن بعد مع طفرة 62 مترًا ، بداية أبريل 2011 ، المهمة هي الاستطلاع وإمدادات المياه إلى أعلى الكتلة المدمرة.
بوتزميستر التي يتم التحكم فيها عن بعد مع طفرة 62 مترًا ، بداية أبريل 2011 ، المهمة هي الاستطلاع وإمدادات المياه إلى أعلى الكتلة المدمرة.أعتقد أن المظهر الفوري لهذه المعدات على موقع FNPP يرجع إلى حقيقة أنه على مدى السنوات العشر الماضية أصبح من الشائع إضافة إمكانية التحكم الخارجي من جهاز التحكم عن بعد إلى آلات البناء ، أي بشكل أساسي تحكم إلكتروني بالكامل في الداخل ، والذي يسهل بالفعل إحضاره إلى نصف الكرة الأرضية الآخر على الأقل. مع وجود مثل هذه التقنية ، يكفي تعليقها بالكاميرات وتجهيزها بقناة الاتصالات الصحيحة ، ويكون الروبوت الذي يتم التحكم فيه عن بعد جاهزًا. لسوء الحظ ، في عام 1986 ، لتحقيق هذه النتيجة ، كان من الضروري أن نعذب أنفسنا ، وفي الواقع لم يتم حل المشكلة - اتضح أن السرعة في القضاء على عواقب الحادث أكثر أهمية من حمولة جرعة الناس.

وأخيرًا ، منذ عام 2011 ، تم أيضًا استخدام التكنولوجيا البعيدة المقاومة للإشعاع ، وهي معيار للصناعة النووية ، في موقع FAES: روبوتات BROKK الثقيلة (أكثر من طن!) ومناورات عربات التسوق المتنقلة Walischmiller - بشكل أساسي مرة أخرى على تفكيك النفايات المشعة ، والعمل في سخونة النقاط.
من الغريب أن كل هذه المعدات لم يكن لديها مشاكل محددة مرتبطة بالإشعاع - حسنًا ، أو تم تكتمها بطريقة أو بأخرى (وهذا أمر مشكوك فيه). ومع ذلك ، تم استخدام الروبوتات غير المحمية في الحقول المنخفضة (لا تزيد عن 15 الأشعة السينية في الساعة) ، وللحالات الأكثر شدة ، تم وضع الحماية من الرصاص في بعض الأحيان على الإلكترونيات (على سبيل المثال ، 3 مضخات خرسانية تعمل بالتحكم عن بعد بوتزميستر ، والتي كانت قريبة من الكتل التي دمرتها الانفجارات وسكب الماء من فوق)
 حالة الإشعاع بتاريخ 23/3/2011 - بعد أسبوع من انتهاء المرحلة النشطة من الحادث. أكبر رقم قدره 130 ملي سيفرت هو 13 R / h ، مقارنة مع ~ 1000 R / h في موقع تشيرنوبيل في 6 مايو.
حالة الإشعاع بتاريخ 23/3/2011 - بعد أسبوع من انتهاء المرحلة النشطة من الحادث. أكبر رقم قدره 130 ملي سيفرت هو 13 R / h ، مقارنة مع ~ 1000 R / h في موقع تشيرنوبيل في 6 مايو.ومع ذلك ، ينبغي ملاحظة نقطة مهمة واحدة هنا. لم يتم إرسال المعدات التسلسلية أو شبه المتسلسلة إلى وعاء المفاعل أو إلى أسفل الحاوية ، حيث تم قياس الحقول التي تصل إلى 50000 دورة / ساعة في وقت لاحق. لمثل هذه المهام ، وغيرها من المهام المحددة ، مثل إزالة التلوث بكميات كبيرة ، والاستطلاع تحت الماء ، وإزالة الحطام من برك تخزين الوقود المستهلك ، قادت الشركات اليابانية منذ عام 2011 تطوير مجموعة متنوعة من الآليات ، يتم تشغيل العديد منها اليوم فقط. دعونا نلقي نظرة عليها:
 عداء المسح و FRIGO-MA
عداء المسح و FRIGO-MAلنبدأ بإصدار أكثر إحكاما من حركيات Pakbot - عداء استبيان TOPY. ومع ذلك ، ليس روبوتًا مثيرًا للاهتمام للغاية ، زحف إلى أقبية الكتل في عام 2012. تم استخدام نسخة أصغر من هذا المخطط تسمى FRIGO-MA ، بالإضافة إلى روبوت غريب بأربع أرجل من توشيبا يمكن أن ينتج استطلاعًا مسطحًا منفصلًا ، للتحكم في التسرب من أنابيب أنابيب المفاعل (لفترة طويلة من الوقت كانت مهمة العثور على أماكن لتسرب مياه التبريد مهمة للغاية للمصفين).
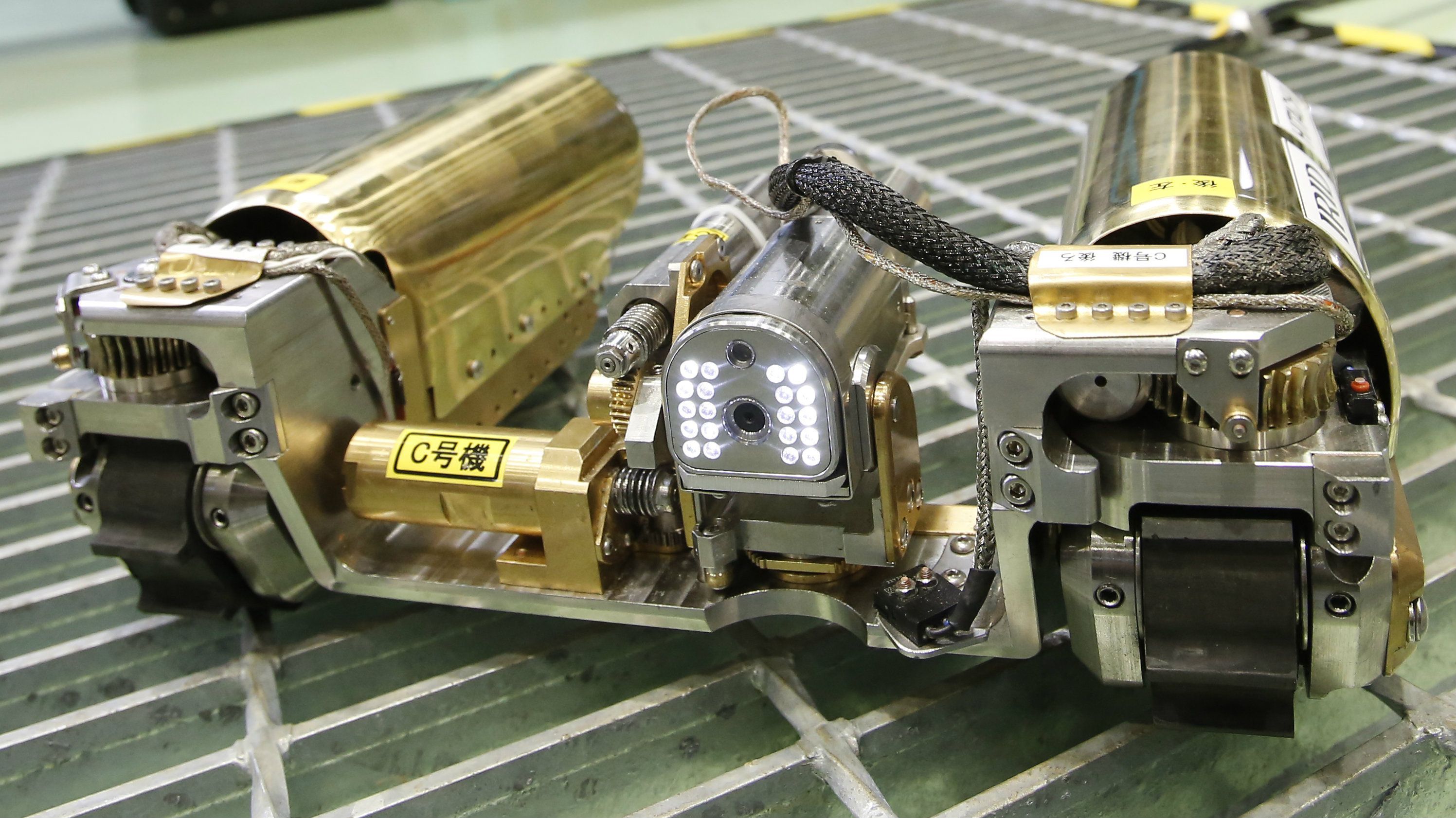
قام العقرب ، وهو كشافة أصغر وأكثر قوة ، بتطوير توشيبا - ودخل هذا الروبوت إلى الفقاعات ومفاعلات الحاويات (ويبدو أن أحد العقارب أصبح أول روبوت يتم نسخه بواسطة وسائل الإعلام).
اختبار "العقرب" على تخطيط قالب المحتوى 2. من المثير للاهتمام أنه تم بناء الكثير من النماذج المختلفة لإرسال الروبوتات ، التي أعادت إنتاج العديد من عناصر تصاميم محطات الطاقة النووية بشكل موثوق.بالمناسبة ، إلى مسألة الكشافة الصغيرة. أحببت صورة هذا الروبوت - خمن ما يستخدم ككاميرا

كان منافس Toshiba Scorpion هو مغير شكل هيتاشي ، وهو تصميم مذهل إلى حد ما مع حركيات مثيرة للاهتمام. تم إرسال روبوتين من هذا الإصدار إلى الجزء السفلي من الحاوية ، وأجروا الاستطلاع في مجالات ~ 500 r / h (5 Sv / h) ، ووجدوا هناك رذاذًا من الكوريوم.

هم الذين أصبحوا بطل أخبار العام الماضي "أرسلت TEPCO الروبوتات إلى المفاعل ، وماتوا من الإشعاع" - في الواقع ، الروبوت الأول عالق للتو ، لكن الثاني وصل بالفعل عبر قطعة من SNF بحقل 5000-8000 دورة / ساعة ورفضت الإلكترونيات (سخرية القدر هنا هي أن مصطلح "البقاء واعيًا" في سيارة تبين أنه مشابه جدًا لشخص ما). بالمناسبة ، على الرغم من الموت ، اكتشفت هذه الروبوتات شيئًا مهمًا إلى حد ما - في حاوية الحاوية للوحدة 1 ، يكون الماء على مستوى عالٍ إلى حد ما ، مما يعني أنه ضيق.
تم تصوير الفيديو من قبل أحد هؤلاء الكشافة.ومع ذلك ، على عكس الشخص ، فإن المهندسين لديهم الفرصة ، في مواجهة مشكلة ، في محاولة حلها عن طريق ابتكار خيار جديد. تختبر توشيبا الآن نسخة من نفس كشافة العقرب الصغير ، وهي مزودة بقرص صغير وسكين صغير لدفع قطع من الكوريوم. بشكل عام ، تقترب السيارات الجديدة وأقرب إلى المنطقة الرئيسية غير المستكشفة - أماكن اختراق وعاء المفاعل وكوريوم الحاوية ، ورسم خريطة موقع الكوريوم تحت المفاعل في الكتل 1،2،3.
في الوقت الحالي ، وبفضل الطرق غير البعيدة ، تمكنت شركة TEPCO فقط من خفض الكاميرا المقاومة للإشعاع في الكتلة رقم 2 إلى الكوريوم وقياس DER عند 530 Sv / h (أي 53000 r / h). لا يسمح لنا معدل الجرعة هذا بالأمل في أن تكون مهمة الاستطلاع / رسم الخرائط بسيطة - تصبح الإلكترونيات الحالية ، حتى المقاومة للإشعاع ، غير موثوق بها للغاية في مثل هذه الظروف ، ومن المستحيل حمايتها في روبوت صغير.
بالمناسبة ، في إطار ITER ، يتم تطوير خط من الدوائر الدقيقة المقاومة للإشعاع (ADC ، DACs ، الواجهات الرقمية ، المنطق) في أوروبا لظروف العمل هذه تقريبًا. مثال آخر على كيفية تحقيق مشروع "عديم القيمة" نتائج ملموسة.
بعد الانتهاء من موضوع الاستطلاع ، تجدر الإشارة إلى أن TEPCO استخدمت العديد من الروبوتات التسلسلية المستقلة تحت الماء وقارب صغير يتم التحكم فيه عن بُعد لاستطلاع الأقبية المليئة بالمياه.
كانت المهمة الرئيسية الثانية لجيش الروبوتات TEPCO وهي تحليل الانسدادات ، في المقام الأول في إطار إزالة SNF. كما كتبت أعلاه ، استخدمت FAEC في البداية منتجات BROKK و Walischmiller القياسية للصناعة النووية ومعدات البناء التي يتم التحكم فيها عن بعد. ومع ذلك ، سرعان ما طورت هيتاشي روبوتًا خاصًا يشبه BROKK (أي روبوت مجنزر ثقيل مع قوة ذاتية من محرك احتراق داخلي) روبوت ASTACO-SoRa.
تحت ستار ASTACO-SoRa ، هناك شيء من صور الأنمي اليابانية.كانت مهمته هي تفكيك حطام الكابلات - وهو كائن معقد لتفكيك الأسلحة الآلية القياسي ، والذي يوجد غالبًا في محطات الطاقة النووية. إلى جانب ASTACO-SoRa و BROKKs المقاومة للإشعاع ، تم استخدام الروبوتات المفككة Husqvarna DXR-140 و DX-250 و DX-310. كيف لم تعرف أن husqvarna تنتج المدمرات؟
 قبول هوسكفارن في عام 2012 في محطة فوكوشيما للطاقة النووية.
قبول هوسكفارن في عام 2012 في محطة فوكوشيما للطاقة النووية.لماذا تحتاج مثل هذه الأجهزة؟ دعني أذكرك أنه في إطار الحدث الرئيسي لهذا اليوم ، وهو استخراج الوقود النووي المستهلك من برك التخزين ، من الضروري تفكيك الحطام حول البرك ، وبناء الملاجئ ، والاستعداد بشكل عام. وليس في كل مكان تسمح البيئة الإشعاعية للناس بالقيام بذلك ، لذا فإن التحول الكبير لهذه المهام إلى تفكيك الروبوتات أمر مفهوم ، على الرغم من أن وتيرة العمل تنخفض بشدة.
 مرة أخرى ، في هذه المهمة ، إلى جانب جميع أنواع الروبوتات الخرقاء والبطيئة ، تعمل معدات البناء التي يتم التحكم فيها عن بعد.
مرة أخرى ، في هذه المهمة ، إلى جانب جميع أنواع الروبوتات الخرقاء والبطيئة ، تعمل معدات البناء التي يتم التحكم فيها عن بعد.بالمناسبة ، عن الوتيرة ، القليل من الانحدار. في عام 1986 ، تحركت الروبوتات بشكل أبطأ ، وكانت أقل دقة وموثوقية ، وكل يوم تأخير مع دفن SNF من سطح وحدة Chernobyl NPP 4 أدى إلى إزالة النويدات المشعة الإضافية - عن طريق الرياح والمياه. لهذا السبب ، في محاولة لإكمال مهام التنظيف باستخدام الروبوتات ، والتأكد من أنها بطيئة جدًا ، عاد مصفيو حادث تشيرنوبيل إلى تحقيق هذه المهمة من قبل الناس. أصبح بطء وعدم موثوقية الروبوتات السبب الرئيسي لاستخدامها الصغير ، وليس الإشعاع و "الظروف الرهيبة" ، كما يحب مطورو تلك الروبوتات القول. كدليل ، سأقدم جزءًا من فيديو وثائقي:
ولكن نعود إلى فوكوشيما. إلى جانب تفكيك الحطام وشحن النفايات المشعة الصلبة في حاويات على كتل ملوثة ، كانت هناك (ولا تزال) مهمة أخرى غير سارة - إزالة التلوث من الجدران والأرضيات والأسقف ، وما إلى ذلك - جميع العناصر الهيكلية التي لا يمكن إزالتها ببساطة من مكان العمل المستقبلي. استقرت النويدات المشعة خلال المرحلة النشطة من الحادث على هذه الأسطح - في مكان ما يمكن غسلها فيه ، وفي مكان ما يجب نزعه. الخيار الجيد هو السفع بالجليد - قصف الأسطح بجزيئات الجليد الجاف (من ثاني أكسيد الكربون) ، متبوعًا بالشفط على مرشح كل ما حدث. ومع ذلك ، فإن النظام نفسه لمثل هذا التنظيف مرهق إلى حد ما - بادئ ذي بدء ، حاولوا تثبيته على نفس Husqvarna DXR-140 بوزن 985 كجم ، لكن النتيجة لم تكن جيدة جدًا. لكننا في اليابان! وطن الروبوتات الغريبة! وتجاوزت النتيجة كل التوقعات.
يتكون القطار الآلي من أربع عربات ، أولها مجهز بمضرب للتطهير ، في حين يحمل الباقي نظامًا لتوليد الثلج الجاف ، ومكنسة كهربائية ، ومرشحات ، وسوائل تنظيف متنوعة ، إلخ.بشكل عام ، تم إنشاء حوالي 12 آلية متخصصة لمهمة إزالة التلوث ، بما في ذلك الأسهل لتنظيف الأرضية والأغرب لتنظيف السقف. في الوقت نفسه ، بقدر ما يمكنك أن تفهم ، فإن نتائج الاختبارات لا ، ولكن العمل الحقيقي على الكتل لا يزال متواضعًا إلى حد ما ويشبه نفس الاختبارات ، فقط في العالم الحقيقي. بما في ذلك ، لم يتم تشغيل قطار megarobo الموضح أعلاه إلى كتل (على ما يبدو).
تقنية إزالة التلوث - معالج مثبت على نهاية سلم قابل للسحب يتم التحكم فيه عن بعد؟
مثال آخر لآلة تطهير غريبة.
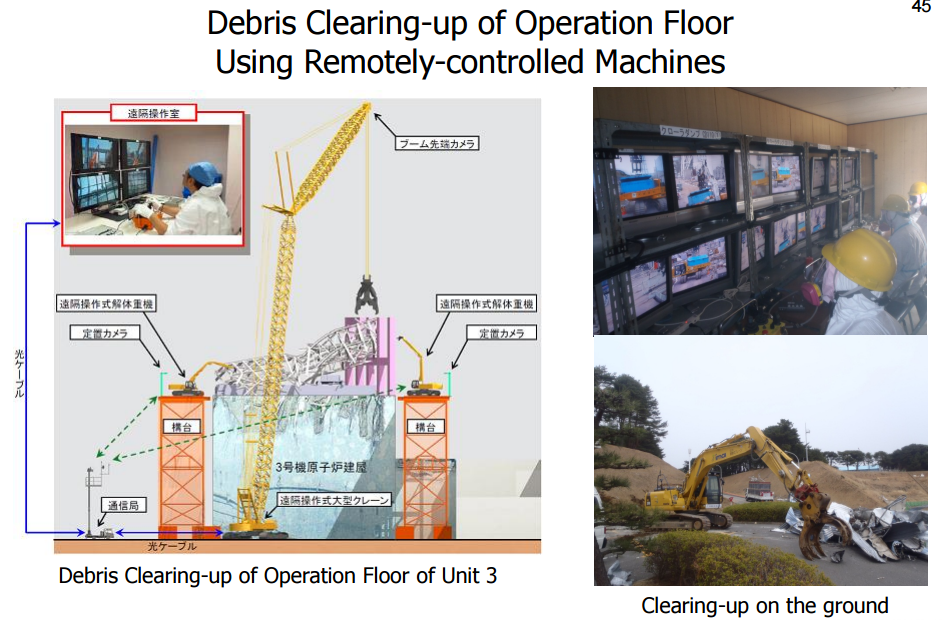
وأخيرًا ، فإن آخر مهمة مهمة يقوم اليابانيون بتصميم الروبوتات التي يتم التحكم فيها عن بُعد هي إزالة تجمعات التعرض. هذه المهمة هي الأكثر صعوبة بسبب هنا ، بالإضافة إلى الهياكل غير المستقرة في المياه الموحلة ، يجب على المرء التعامل مع حقول الإشعاع الكبيرة (خاصة التقاط القمامة من الرفوف بالوقود النووي المستهلك) وخطر تفشي سلسلة من التفاعلات - على سبيل المثال ، إذا أسقطت مجموعة وقود واحدة على أخرى ، فمن الممكن تمامًا.
مقطع فيديو تم التقاطه بواسطة مركبة تحت الماء في مجموعة التعرض للكتلة الثالثة. تحت هذه القمامة هناك مئات الأطنان من الوقود المستهلك!لحل هذه المشكلة ، تم إنشاء مجمع كبير نوعًا ما من روبوت متحكم فيه عن بعد تحت الماء مع اثنين من المتلاعبين معلقة على رافعة علوية وأجهزة رفع مختلفة. تخطط TEPCO لبدء استخدام هذا المجمع بالفعل في عام 2017 عند إزالة الوقود المستهلك في الوحدة الثالثة ، حيث يجب أن يبدأ تفريغ SNF في 2018.
للتلخيص ، أود أن أشير إلى ما يلي:
1 - أصبحت تصفية نتائج الحادث الذي وقع في محطة فوكوشيما للطاقة النووية مكانا للاستخدام المكثف للمعدات التي يتم التحكم فيها عن بعد ، ولا سيما في مهام الاستطلاع ورسم الخرائط.
2. لا تستطيع الروبوتات التسلسلية الموجودة أن تتعامل مع مهام التصفية نفسها (والاستطلاع في الأماكن الصعبة). لمدة عامين أو ثلاثة بعد وقوع الحادث ، تم تطوير العديد من متغيرات المعدات الجديدة - من الواضح أن البحث جار عن نماذج ناجحة وفعالة للعمل في ظروف الحوادث الإشعاعية في المنشآت الصناعية. بالمجموع ، بالمناسبة ، أحصيت 43 نوعًا من السيارات التي يتم التحكم فيها عن بُعد والتي سقطت في إطارات تقارير TEPCO.
3. عمل آلات التحكم عن بعد أبطأ بكثير من مساعدة الناس. , , : , ( ).
PS , - - — .