
في المقالة ، نعتبر الجزء الإلكتروني من Quadoscopter Geoscan Pioneer الجديد ، المصمم لتعليم الروبوتات. سنتحدث عن إنشاء مروحية ، أو بالأحرى ، ما الخبرة التي اكتسبناها والتغييرات التي أدخلناها على المشروع. في النهاية - شارك خطط المستقبل.
1. لماذا إنشاء quadrocopter للتدريب في Geoscan
لحل العديد من المشاكل التطبيقية ، يتم استخدام المركبات الجوية غير المأهولة (UAVs) ، على وجه الخصوص ، الأنظمة متعددة الدوار. يمكن رؤية وجودها في العديد من المجالات ، على سبيل المثال ، في التصوير الجوي ، توصيل البضائع ، تصوير الفيديو من الجو ، مراقبة الأشياء ، وكذلك في السباقات (سباق الطائرات بدون طيار).
ومع ذلك ، في صناعة الطائرات بدون طيار سريعة النمو هناك نقص في الموظفين المحترفين. من الأفضل إعداد الموظفين الفنيين ابتداء من المدرسة. فقط المراحل السابقة: من التصميم إلى التشغيل والتحديث - يمكن أن يصبح محترفًا حقيقيًا في مجاله ويعطي جولة أخرى في تطوير الصناعة ، من حيث التكنولوجيا ومن حيث إشراك عدد متزايد من المجالات ذات الصلة في الصناعة وحل عدد متزايد من المشاكل التطبيقية .
يمكن القول أن استخدام الطائرات الرباعية من قبل أطفال المدارس والطلاب والهواة كرجل آلي طائر لتعلم أساسيات تطوير وتشغيل وتحديث الطائرات بدون طيار هو موضوع مثير للاهتمام بالنسبة لنا. ونتيجة لذلك ، يمكن أن يؤدي ذلك إلى إنشاء قاعدة لمعيار تعليمي جديد.
نعتقد أن الموضوعات التالية هي الأكثر إثارة للاهتمام للدراسة:
برمجة أنظمة التحكم ، إنشاء خوارزميات التوجيه والملاحة في الفضاء ، التعرف على البيئة ؛
الإلكترونيات - توصيل أجهزة الاستشعار ودراسة مبادئ عملها ، ودراسة هيكل أنظمة الطائرات ؛
تصميم الإطار والميكانيكا ، وكذلك دراسة المعلمات الكهربائية والميكانيكية للمروحية لتحسين أوضاع الطيران عند حل المشكلات المختلفة ؛
التحكم في المروحية في كل من الوضع التجريبي وفي وضع تشغيل الطائرات بدون طيار. أي يدوياً أو تلقائياً.
وبالتالي ، يتم تشكيل الكثير من المهام المثيرة للاهتمام والتي يمكن تركها لحلها لجيل الشباب في إطار الدوائر التعليمية والمسابقات والأولمبياد.
بناءً على ما سبق والخبرة الحالية في إنشاء الطائرات بدون طيار في Geoscan ، قررنا وضع هذه الأفكار موضع التنفيذ من خلال إنشاء برنامج ومنصة إلكترونية.
تجدر الإشارة إلى أنه من أجل برمجة روبوت طائر ببساطة ، تحتاج إلى نظام ملاحة. وإذا تم حل هذه المشكلة في الشارع باستخدام الملاحة عبر الأقمار الصناعية ، فإن هذه المشكلة في الداخل ليس لها حل واضح. نظرًا لأنه ليس من الممكن دائمًا العمل في الشارع بسبب الطقس أو التضاريس المحيطة أو السلامة ، أصبح التنقل الداخلي أمرًا ضروريًا. أي نظام ملاحة اخترناه سيتم وصفه أدناه.
2. النسخة الأولى من إلكترونيات المروحية "المدرسة"
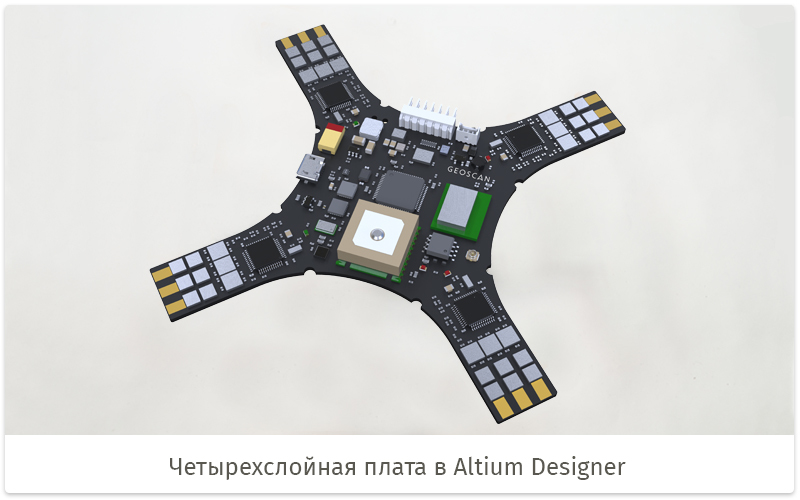
لإنشاء مروحية صغيرة ، من الضروري تقليل كتلة وأبعاد الإلكترونيات إلى الحد الأدنى. للقيام بذلك ، من المنطقي تطبيق حل لوحة واحدة تحتوي على طيار آلي (AP) مع أجهزة استشعار ، ووحدات تحكم المحرك ، والاتصالات اللاسلكية ، وإمدادات الطاقة والموصلات اللازمة. يبسط "اللوح الواحد" الجمع بين الإلكترونيات والإطار ويقلل عدد الأسلاك إلى الحد الأدنى.
يتم استخدام المحركات الخالية من الفرشاة بسبب عدد من المزايا مقارنة بالمحركات الخالية من الفرش. هذه المحركات أكثر كفاءة وموثوقية ، ويسمح لك عزم الدوران الكبير خفيف الوزن نسبيًا بالتخلي عن استخدام علبة التروس على المسمار. هناك صعوبة معينة تتمثل في تطوير وحدات التحكم في السرعة للمحركات الخالية من الفرشاة. ولكن بفضل الخبرة في تطوير الطائرات بدون طيار "الكبار" ، لم تصبح هذه مشكلة كبيرة. من السلبيات لمجموعة المحركات المروحة المختارة ، يمكن ملاحظة تكلفة المحركات والمنظمين فقط ، ولكن يتم تبريرها بوقت الرحلة ، وخصائص السرعة الجيدة للمروحية ، والقدرة على نقل حمولة أكبر ، ولديها أيضًا القليل من القلق بشأن شراء واستبدال المحركات الفاشلة.
وهكذا ، اقتربنا من إنشاء لوحة نموذجية لمروحية صغيرة. لن نولي اهتمامًا كبيرًا لهذا المجلس ، ولكننا نلاحظ فقط عيوبه الرئيسية ، التي ليست قليلة ، ويرجع ذلك أساسًا إلى وقت التطوير المتواضع للغاية الذي يبلغ ثلاثة أسابيع.
في التصميم الأولي ، أردت تجربة أقصى قدر من الوظائف للمروحية ، لذلك تم وضع مقياس المغناطيسية ووحدة التنقل عبر الأقمار الصناعية على اللوحة ، والتي تبين أنها غير قابلة للتشغيل بسبب التوافق الكهرومغناطيسي غير الكافي مع اللوحة. كان مقياس المغناطيسية قريبًا جدًا من موصلات الطاقة ، وعندما مر التيار عبر الموصل ، أعطى مقياس المغناطيسية معلومات غير صحيحة. نظرًا لعدم كفاية مساحة الشاشة لهوائي السيراميك ، وجد جهاز استقبال GPS عددًا غير كافٍ من الأقمار الصناعية للملاحة.
لسهولة توصيل quadrocopter بكمبيوتر ، تم استخدام مودم Wi-Fi. يعد استخدام هذه الواجهة للقياس والتحكم عن بعد مشكلة إذا كان من المفترض أن يعمل في بيئة صاخبة ، على سبيل المثال ، في المعارض أو الأحداث العامة الأخرى حيث يوجد الكثير من الأجهزة بتردد 2.4 جيجا هرتز. بالإضافة إلى ذلك ، أظهرت الوحدة تشغيل شبكة غير مستقر.

من وجهة نظر العملية ، لم يعمل كل شيء بسلاسة تامة. أولاً ، يجب أن تكون أسلاك الطور للمحركات ملحومة على اللوحة ، حيث لا توجد موصلات لها. تكمن الصعوبة في الحاجة إلى امتلاك مهارات في العمل مع حديد لحام والقدرة على خلط ترتيب الأسلاك ، مما يؤدي إلى الاتجاه الخاطئ لدوران المحرك ، كما يعقد عملية التجميع والتفكيك. ثانيًا ، لم يكن من الممكن عمل ثقوب تركيب ملائمة على اللوحة ، مما أثر سلبًا على موثوقية وعملية تثبيت اللوحة على الإطار. ثالثًا ، موصل الواجهة على شكل "دبابيس" قياسية مع ميل 2 مم ليس مناسبًا دائمًا للاستخدام عند توصيل أجهزة متعددة.
من بين أمور أخرى ، كانت أبعاد اللوحة أكبر من المتوقع بسبب التثبيت الأحادي للعناصر (باستثناء عدد صغير من عناصر المنظم على الجانب السفلي).

ومع ذلك ، تبين أن المروحية عامل. تم نقل الطيار الآلي والبرامج الثابتة من
المروحية "الكبيرة" الخاصة بنا . بعد تعديل معاملات حلقات التحكم بشكل طفيف ، جعلنا المروحية تقوم بعمل ممتاز في مهمتها الرئيسية - الطيران. مع محركات 1306 3100 كيلو فولت ، ومسامير 5 بوصة وبطارية LiPo 2s 1300 mAh ، تطير المروحية لمدة 15-16 دقيقة ، ومع GoPro3 (80 جم) - حوالي 10 دقائق.
تم تنفيذ رحلة في نظام ملاحة بالموجات فوق الصوتية (الولايات المتحدة) من
Marvelmind . يتكون النظام من نوعين من منارات الموجات فوق الصوتية: الثابتة والمتنقلة. في الوقت نفسه ، يعطي المنارة المتحركة للنظام المثبت على المروحية 3 إحداثيات موقع للطيار الآلي بدقة منخفضة بما فيه الكفاية (± 5-10 سم) ونظام التحكم الذي أنشأناه يجمع بين هذه البيانات مع بيانات الجيروسكوب ومقياس التسارع ، ويتحكم في الموقع المكاني للمروحية.
3. أفكار لإنشاء نسخة جديدة
عند الاقتراب من الإصدار الجديد من اللوحة ، أصبح من الواضح لنا أن هناك حاجة إلى عدد من التحسينات. فكرنا في مفهوم المشروع بمزيد من التفصيل ، حيث ظهرت رؤية كاملة لمناطق وطرق استخدام المروحية. كانت الفكرة الرئيسية هي قرار ترك المكونات الضرورية فقط على اللوحة وإنشاء نوع من "اللوحة الأم" ، التي سيتم توصيل الوحدات التي تحدد الغرض الوظيفي للمروحية. مثال على هذه الوحدة هو جهاز استقبال الأقمار الصناعية مع بوصلة للملاحة في الشوارع.
الآن تحتوي اللوحة الجديدة على وحدة تحكم AP الرئيسية مع أجهزة استشعار - مقياس التسارع والجيروسكوب ومقياس الضغط. هناك حاجة إلى البارومتر لوضع احتجاز الارتفاع ، والذي يبسط بشكل كبير التحكم في المروحية مع التحكم اليدوي. لتخزين سجلات الطيران ومعلمات الطيار الآلي ، نستخدم شريحة ذاكرة فلاش منفصلة.
يتم تشغيل جميع المكونات الإلكترونية الموجودة على اللوحة ووحدات التوسع من خلال ثلاثة محولات جهد: 5 فولت (للوحدات ، ومصابيح LED ، وأجهزة استقبال PPM / SBUS) ، و 3.3 فولت (للوحدات والدوائر الصغيرة على اللوحة) ، و 3.3 فولت أخرى على حدة لأجهزة الاستشعار. جهد الدخل من 6 فولت إلى 14 فولت ، والذي يتوافق مع بطارية ليثيوم بوليمر مع اثنين إلى ثلاثة "بنوك" (2s-3s).

يتم الاتصال بالكمبيوتر عبر قناة راديو أو USB. لتقليل وقت التطوير ، استخدمنا وحدة راديو راديوي
كرافت جاهزة 868 ميجا هرتز
بطاقة 25 ميجاوات.
يتم تزويد وحدة الراديو بهوائي رقاقة على اللوحة ، بالإضافة إلى موصل لتوصيل هوائي خارجي. ومع ذلك ، لاستخدام موصل الهوائي الخارجي ، يجب عليك العمل مع مكواة لحام. من المفترض أن مستخدم الرقاقة سيكون لديه ما يكفي من هوائيات الرقائق. لتوصيل جهاز الكمبيوتر بالمروحية عبر الراديو ، تحتاج إلى استخدام مودم USB المتبادل المرفق في المجموعة.

تعمل مصابيح WS2812B RGB التي يتم التحكم فيها كمؤشرات للأحداث المختلفة. من الممكن توصيل مصابيح LED إضافية ، باستثناء تلك الموجودة على اللوحة.

أجهزة التحكم في سرعة المحرك قادرة على تحمل تيار 20 أمبير ولديها القدرة على الفرامل بنشاط ، مما يؤثر بشكل إيجابي على ديناميكيات التحكم في المروحية.
يقع جهد الإمداد في بطاريات LiPo 2s-3s. يتم توصيل المنظمين إلى AP عبر UART ، وليس من خلال إشارة PWM. هذا له تأثير جيد على مناعة الضوضاء. يتم تقليل حجم المنظمين ، مقارنة بالإصدار الأول ، بسبب الحالات الأكثر تعقيدًا للمكونات الإلكترونية. بالإضافة إلى ذلك ، قمنا بتركيب المكونات في اتجاهين ، مما سمح لنا أيضًا بتقليل حجم اللوحة.

الآن توجد ثقوب تركيب "بشرية" على اللوح لسهولة التركيب على الإطار.
هناك موصلات أكثر فائدة. الآن لا تحتاج إلى لحام أسلاك المحركات إلى اللوحة. يتم توصيل وحدات التمدد عبر موصلين أعلى اللوحة ، ولا يمكنك الخلط بين موضع الوحدة بسبب العدد المختلف من المسامير وتصميم الموصل نفسه. تم اختيار
موصلات TE Micro-MaTch للحماية من التلف الميكانيكي. على عكس دبابيس 2.54 مم ، لا تتلف بسهولة إذا أسقطت أو أسيء التعامل معها. يمكنك أيضًا توصيل الوحدات النمطية من خلال كبل تمديد للسماح بتنفيذ الوحدة ، على سبيل المثال ، أسفل المروحية. يتم توصيل الواجهات التالية بهذه الموصلات: UART و SPI و I2C والعديد من GPIOs وإشارة لتوصيل مصابيح LED ذات تحكم إضافي ومصدر طاقة 3.3 فولت و 5 فولت. المستوى المنطقي للواجهات هو 3.3 فولت افتراضيًا ، ولكن يمكن تغييره إلى 5 فولت إذا رغبت في ذلك.
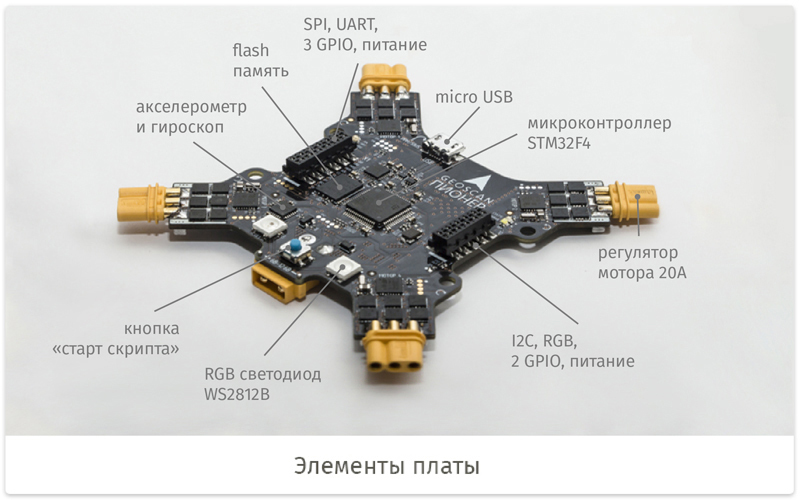
يتم برمجة الزر بواسطة المستخدم أو استخدامه افتراضيًا لتشغيل البرنامج النصي.
القليل عن مكون البرنامج في النظام الأساسي. برنامج STM32F4 الطيار الآلي متحكم في لغة C ++ ويعمل على RTOS
NuttX . تم إغلاق البرنامج الثابت ، ولكن يمكن للمستخدم كتابة
رمزه بلغة البرمجة النصية
Lua .
بشكل عام ، اخترنا من العديد من لغات البرمجة النصية: Python و JavaScript (
IoT.js ) و Lua. من الصعب استخدام تطبيق Python القياسي تحت MK ، نظرًا لحجمه الكبير جدًا. نظرنا في الخيار مع MicroPython ، لكنه لم ينجح بسبب إمكانية الوصول المباشر إلى تعليمات المجمّع. ولا نريد أن نوفر لهم الوصول العادي للمستخدم العادي. جافا سكريبت لها وظائف زائدة ، ولإزالة الفائض ، يجب أن تعمل. Lua هي لغة شائعة جدًا ، قابلة للتوسيع بسهولة باستخدام C ++ ، ولديها تطبيقات مناسبة لنا.
قد يحتوي البرنامج النصي على خوارزميات تحكم أو مجرد سلسلة من الإجراءات ، وتلقي ومعالجة البيانات من أجهزة الاستشعار ، وإدارة الحمولة ، وما إلى ذلك بشكل عام ، يتم توفير مجموعة واسعة من وظائف التفاعل مع الروبوت الطائر ، والتي يمكن استخدامها في مهام البحث أو المنافسة أو الهواة. يمكن كتابة البرنامج النصي وتحميله إلى المروحية باستخدام تطبيق خاص ، ولكن يمكنك أيضًا إنشاء رمز باستخدام
Google Blockly .
يمكنك تنزيل البرنامج النصي عبر سلك USB أو قناة راديو. يعرض التطبيق على جهاز الكمبيوتر معلومات القياس عن بعد ، والتي تسمح لك بالحكم على حالة المروحية. وبالطبع ، هناك ضوابط وإعدادات للروبوت.
الإطار ، في الوقت الحالي ، مصنوع من ألياف الكربون أو الألياف الزجاجية عن طريق صفائح الطحن. يتم تجميعها من عدد قليل من الأجزاء ولها حجرة بطارية.
اختياريًا ، يمكنك وضع الهيكل والحماية اللولبية. الآن في تطوير إطار مصنوع من البلاستيك ، والذي سيتم تصنيعه باستخدام تقنية الحقن.

4. نقوم بتوسيع الوظائف مع الوحدات
كما ذكر أعلاه ، فإن اللوحة لديها القدرة على التوسع باستخدام المكونات الإضافية. الوحدات الرئيسية هي التالية:
وحدة التنقل هي جهاز استقبال لنظام تحديد المواقع الخاص بها للموجات فوق الصوتية الداخلية.
 وحدة GPS
وحدة GPS - تحديد مواقع الأقمار الصناعية في الشارع. كما أن لديها مقياس مغناطيسي على متنها لتوجيه الدورة.
 وحدة ToF
وحدة ToF - تستقبل معلومات من عدة
مستشعرات مسافة
ToF موجهة في اتجاهات مختلفة ، مما يسمح لكشف العوائق.
 وحدة تحميل
وحدة تحميل - مجهزة بآلية الحمل الكهرومغناطيسي ومصابيح LED للإشارة وتأثيرات الإضاءة.
 وحدة Marvelmind
وحدة Marvelmind هي محول لنظام تحديد المواقع Marvelmind.
 وحدة OpenMV
وحدة OpenMV هي محول للكاميرا لرؤية الكمبيوتر
OpenMV .
وحدة السونار - توفر القدرة على الحصول على الارتفاع باستخدام مستشعر الموجات فوق الصوتية.
وحدة WiFi - تضيف واجهة WiFi.
وحدة Bluetooth - تضيف واجهة Bluetooth.
بالطبع ، العديد من الوحدات الأخرى التي نخطط لإنشاءها في المستقبل ممكنة.
5. التطبيق العملي والخطط المستقبلية
الفيديو الترويجي Geoscan Pioneerقمنا بتسليم العديد من الولادات لمؤسسات تعليمية مختلفة. تم إجراؤها على أساس الإصدار الأول من اللوحة ، لذلك كانت عمليات التسليم أكثر تجريبية في الطبيعة. ومع ذلك ، كانت المروحية مناسبة تمامًا كمصمم تجميع ولتعليم مهارات القيادة.
تم عقد المسابقات التجريبية بمشاركة الرواد في Alferievo خلال مؤتمر
Aeronet 2016 .
كيف جذب الروبوت الطيار بايونير الانتباه في مهرجان
Robofiniste للروبوتات. هناك اختبار برحلة من ثمانية ، في الواقع ، تعامل المروحية بنجاح. عمل النظام على أساس الملاحة من خلال الموجات فوق الصوتية.

تم إنشاء منصة مع مساحة آمنة على شكل إطار مع شبكة ، حيث أتيحت الفرصة لجميع زوار المهرجان للسيطرة على المروحية. في الوقت نفسه ، لم يسمح نظام التحكم بإخراج المروحية من المنطقة المسموح بها.
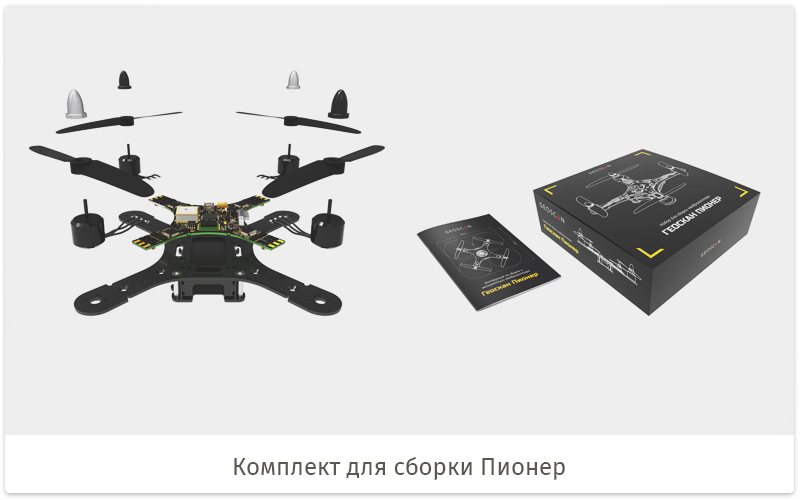
اليوم نحن نعمل على إنتاج الدُفعات الأولى من الرواد ، ونقوم بتطوير وحدات توسعة جديدة ، ونقوم بتصميم إطار بلاستيكي للقولبة ونكمل إنشاء نظام الملاحة بالموجات فوق الصوتية. ومن المخطط أيضًا تقديم عرض رائدنا. يمكنك معرفة المكان والزمان على موقع Geoscan.