منذ بعض الوقت ، تعثرت على الإنترنت في المقالات ومقاطع الفيديو حول المروحيات ، اعتقدت أنه كان صعبًا وغير متاح للجميع. لكن الرغبة في أن تصبح دليل طيران كانت رائعة ، وبعد دراسة كتلة المواد حول هذا الموضوع ، استنتج لنفسه أنه ليس من الضروري شراء نسخة منتهية لبناء طائرة رباعية ، أي البناء من الصفر ونفسه. الآن أريد أن أشارككم تجربتي في بناء quadrocopter على MultiWii SE v2.5. في المقالة سأحاول أن أصف بالتفصيل العملية برمتها لبناء quadrocopter من صفر إلى الرحلة الأولى إلى مبتدئ مطلق في هذا الموضوع ، وهو نفسه كان منذ بعض الوقت.
القليل من النظرية حول طيران كوادكوبتر
سنقوم بتجميع المروحية على الإطار الكلاسيكي للشكل "X". إدارة المروحية ليست سهلة كما قد تبدو للوهلة الأولى ، ليس لها أمامي وخلفي مثل السيارات التي يتم التحكم فيها عن طريق الراديو. مع الأمر "للأمام" ، لا تطير الطائرة الرباعية إلى حيث ينظر الطيار ، ولكن حيث يشير أنف الرباعي (هناك
سهم مقابل على وحدة التحكم في الطيران) ، هذا خطر كبير للمبتدئين ، لأنه من الأرض ، قد يكون من الصعب تحديد مكان أنف المروحية ، لذلك عند بنائه تحتاج إلى وضع علامة عليه بطريقة أو بأخرى ، على سبيل المثال ، بأشعة ذات لون مختلف أو عن طريق وضع مصابيح LED. السيطرة على المروحية ، أي لتحديد وتعيين اتجاهه في الفضاء ، سنقوم بزحزحة ، ولفة وزاوية + الصعود. يتم تحقيق رحلة المروحية في الاتجاه الضروري عن طريق تغيير هذه الزوايا الثلاث. على سبيل المثال ، لكي يطير إلى الأمام ، يجب على المروحية أن تثني أنفه على الأرض (الملعب).
خنق - غاز ، تسلق
الجنيح - لفة ، الجنيح (لفة)
مصعد - مصعد ، الملعب (الملعب)
الدفة - الدفة ، ياو (ياو)
المحركات:
LFW - يسار أمامي ، دوران باتجاه عقارب الساعة
RFC - أمامي يمين ، دوران عكس عقارب الساعة
LBC - خلفي يسار ، دوران عكس عقارب الساعة
RBW - الخلفية اليمنى ، دوران في اتجاه عقارب الساعة

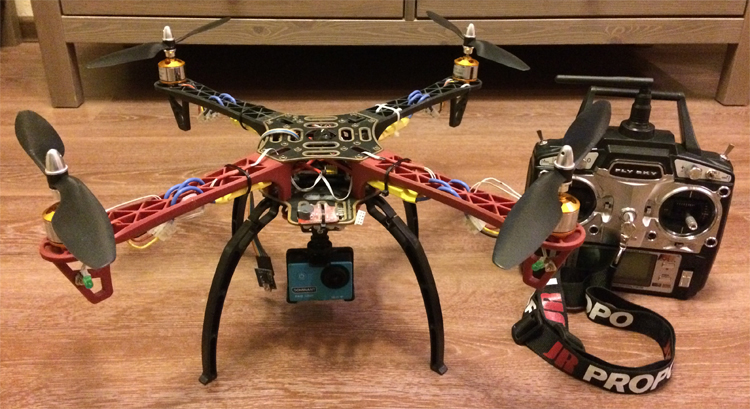
المكونات الضرورية:
جهاز التحكم في الطيران CRIUS MultiWii SE v2.5
مبرمج FTDI
إطار HJ450
المحركات 2212-1000KV - 4 قطع.
ESC 30A تحكم سرعة - 4 قطع.
البطارية 11.1V 2200Mah 3S 40C Li-Po ( مثال )
شاحن بطارية B3 AC 2S-3S 7.4V 11.1V Li-Po Battery Balancer
T-Plug سلك البطارية
المشابك البلاستيكية
FlySky FS-T6 2.4G 6CH معدات التحكم كاملة مع جهاز الاستقبال
مراوح 1045 (10x4.5) CW / CCW - 2 قطعة. دوران عقارب الساعة + 2 قطعة. دوران عكس اتجاه عقارب الساعة تأخذ المزيد من المراوح ، لأن أثناء تعلم كيفية التحكم في المروحية ، عندما تسقط ، ستنكسر مرة واحدة
اختياريًا:
الساقين الهبوط
اختبار البطارية Li-Po مؤشر جهد البطارية اختبار الجهد المنخفض (سيشير عند تفريغ البطارية)
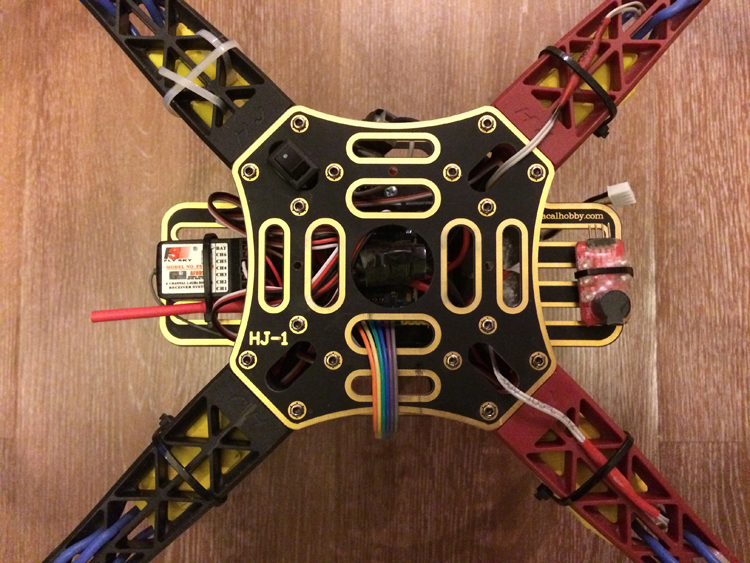
مخطط التجميع:

قبل التجميع ، من الضروري معايرة وحدات التحكم في ESC ، وتكون العملية على النحو التالي: نقوم بتوصيل المحرك بالمنظم ، وربط المنظم بقناة الغاز على جهاز الاستقبال (CH3) والبطارية ، ورفع عصا الغاز على معدات التحكم حتى التوقف ، وتشغيل appu - يتم إصدار صوت مميز ، وخفض عصا الغاز لأسفل على طول الطريق - يتم إصدار صوت مميز ، ثم نقوم باختبار - رفع / خفض عصا الغاز - التحقق من العملية ، وإيقاف التطبيق - يتم معايرة المنظم ؛ باستخدام هذا التشبيه ، قم بمعايرة جميع المجالس الاقتصادية والاجتماعية (
فيديو مناسب للوضوح).
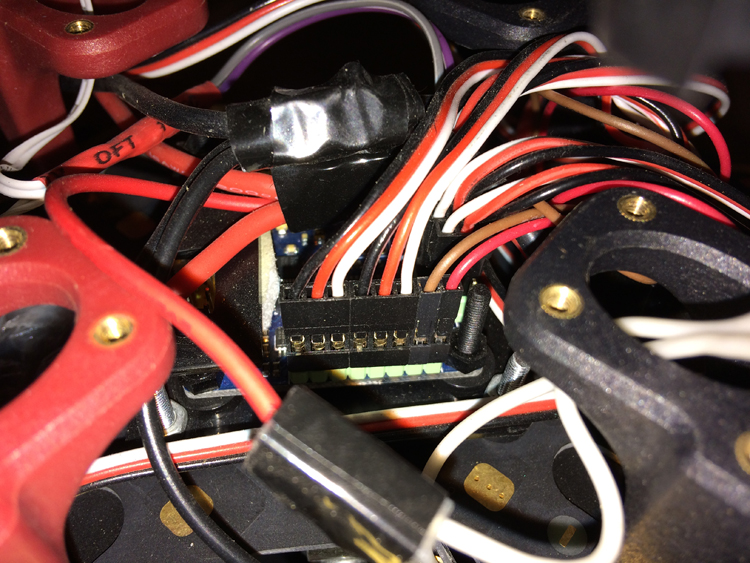
نقوم بتجميع الإطار ، وتثبيت MultiWii ، وتركيب المحركات ، وتوصيل وحدات التحكم في ESC: بالمحركات ، و MultiWii والمراكم (نقوم بتوصيل "الإيجابيات" و "السلبيات" من المنظمين وربطها بالبطاريات "+" و "-" ، على التوالي). تنبيه ، لتغيير اتجاه دوران المحرك ، تحتاج فقط إلى تبديل أي سلكين من الثلاثة القادمة من المحرك إلى ESC. من المستحسن تثبيت MultiWii على الإطار من خلال المنصة (أنا فعلت ذلك
بنفسي ، ولكن يمكنك شرائه) من أجل تجنب الدوائر القصيرة على العلبة ودقة البيانات ؛ لقد صنعت أيضًا "مزرعة جماعية" صغيرة لمقياس الضغط الجوي - أغلقتها بمطاط رغوي لتقليل الخطأ في البيانات.
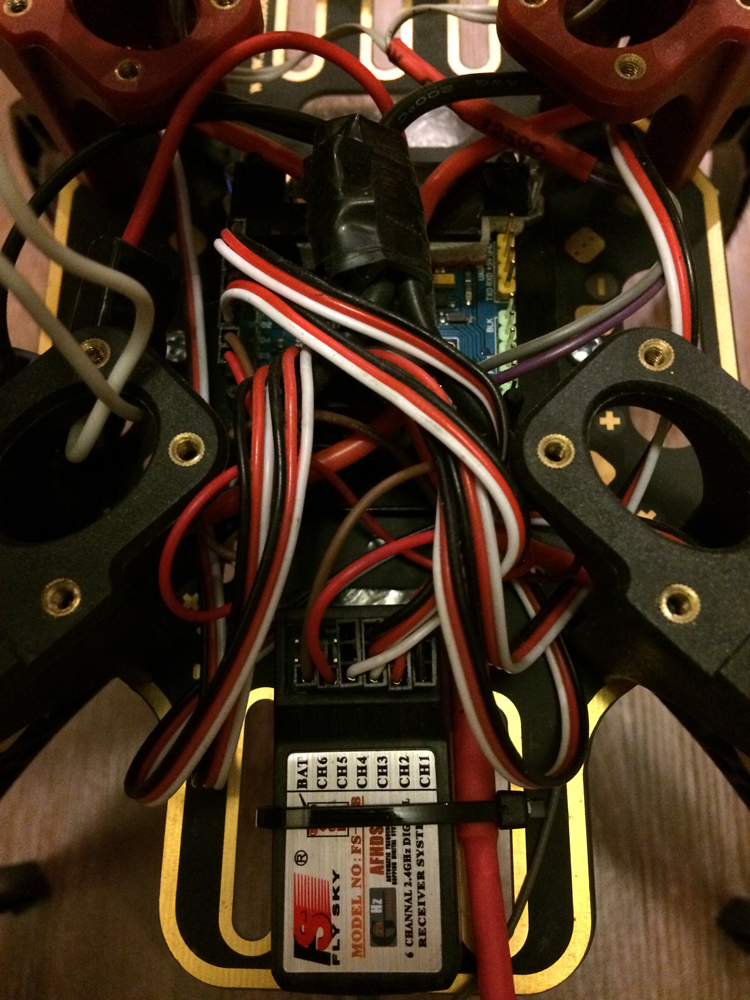
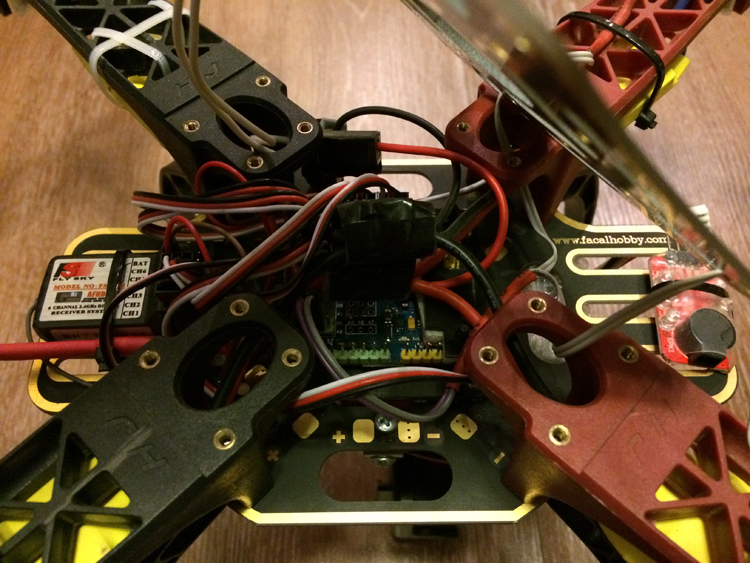
يمكن استخدام القناتين الإضافيتين CH5 و CH6 لتمكين الوظائف: احمل الارتفاع والعودة إلى المنزل والتحكم في انحراف الكاميرا وما إلى ذلك ، يمكنك قراءة المزيد في هذه
المقالة . ترتبط الثنائيات الخاصة بي بـ "+" و "-" على A2. مبرمج FTDI متصل بموصل FTDI المطابق على اللوحة.






بعد تجميع كل شيء وتوصيله ، تحتاج إلى ملء البرنامج الثابت في MultiWii ، تحتاج إلى القيام بذلك من خلال برنامج Arduino IDE (يمكنك تنزيل الإصدار الحالي
هنا ). نقوم بتوصيل MultiWii بالكمبيوتر عن طريق مبرمج FTDI ، وبدء Arduino IDE ، وتحديد منفذ COM الذي يتصل به اللوحة في القائمة ، وكذلك تحديد نوع اللوحة في القائمة ، وفتح البرنامج الثابت (الرابط في نهاية المقالة) ، وفتح ملف MultiWii.ino ، سترى أعلاه عدة علامات تبويب ، سنكون مهتمين فقط بـ config.h ، حيث نحتاج إلى تكوين البرنامج الثابت - اعتمادًا على الإعدادات الضرورية التي تحتاج إلى إلغاء تعليقها (حذف "//") أحد الأسطر في القسم المطلوب (رابط لملف config.h مع الإعدادات الخاصة بي في النهاية المقالة) ، بعد الإعداد ، قم بملء البرنامج الثابت في MultiWii.
الآن نحن بحاجة إلى مواصلة تكوين المروحية عبر واجهة المستخدم الرسومية ، لذلك سنستخدم برنامج MultiWiiConf (الرابط في نهاية المقالة). نقوم بتوصيل MultiWii بالكمبيوتر عن طريق مبرمج FTDI ، وتشغيل MultiWiiConf ، وتحديد منفذ COM الذي يتم توصيل اللوحة به في القائمة ، والضغط على زر START (يجب أن تظهر القيم على الرسم البياني) ، قبل تحرير المعلمات - اضغط على READ ، لحفظ المعلمات - اضغط WRITE. بعد تحديد المنفذ والضغط على START (ترى أن الرسم البياني قد وصل إلى الحياة ، وتصل البيانات) ، تحتاج إلى معايرة المستشعرات: لمعايرة مقياس التسارع ، وتعيين المروحية الموازية للأفق والضغط على زر CALIB_ACC ، سيتجمد واجهة المستخدم الرسومية لبعض الوقت ، ثم تأكد من أن محوري ROLL و PITCH متوازيين ؛ لمعايرة مقياس المغناطيسية (البوصلة) - اضغط على زر CALIB_MAG وقم بتدوير المروحية في جميع المحاور أو ضع المروحية بالتناوب على الأضلاع لمدة 30 ثانية. أيضا ، بعد توصيل برنامج التهيئة بنجاح إلى المروحية الخاصة بك ، في الجزء العلوي الأيمن سترى أشرطة زرقاء تظهر قنوات جهاز التحكم عن بعد ، حرك العصي للتأكد من أن كل شيء يعمل بشكل صحيح. يجب أن تظهر العصا في الموضع الأدنى قيمة 1000 ، في وسط 1500 وفي أقصى 2000 ؛ إذا لم يكن الأمر كذلك ، فقم بتقليم جهاز التحكم عن بعد وفقًا للتعليمات الخاصة به (الرابط في نهاية المقالة). تذكر أن الشرائط يجب أن تتحرك وفقًا لحركات العصي ، أي إذا قمت برفع عصا الخنق ، فيجب أن يرتفع الشريط (بالمثل للقنوات الأخرى) ، إذا لم يكن الأمر كذلك ، قم بعكس قنوات جهاز التحكم عن بعد. أيضا في واجهة المستخدم الرسومية ، يمكنك تعيين الوظائف لإضافتها. القنوات ، مثل الاحتفاظ بالارتفاع (BARO). يجب دائمًا تمكين وظيفة المحاذاة الأفقية (LEVEL)! هنا
فيديو مناسب لتوضيح تشغيل برنامج MultiWiiConf.
عدد قليل من الاستطلاعات حول الموضوع
لا تتوقع أن تحتفظ الوظيفة بارتفاع (BARO) للتحليق الصعب عند نقطة ما يتم استخدام بارومتر لهذا الغرض - سيحاول المروحية بالتأكيد الحفاظ على الارتفاع الذي قمت بتنشيط الوظيفة فيه ، ولكنه سيسبح ضمن دائرة نصف قطرها ± بضعة أمتار ، فقط من أجل دقة البيانات من البارومتر وحمايته من التأثيرات الخارجية ، قمت بإنشاء "مزرعة جماعية" مع المطاط الرغوي. تذكر أنه يجب تنشيط الاحتفاظ بالارتفاع على غاز التمرير ، أي ثم عند استخدام عصا الغاز للتأكد من تثبيت المروحية في نفس الارتفاع وليس من المستحسن لمس الغاز بعد تنشيط الوظيفة. للحصول على تحليق أكثر دقة عند نقطة ما - من الأفضل استخدام وحدة GPS الاختيارية.
وظيفة الاحتفاظ بالدورة (MAG) متقلبة للغاية ، وانتهى استخدامها بشكل مؤسف ، بعد التنشيط والإقلاع ، بدأ المروحية في الدوران مثل قمة الغزل وسرعان ما ابتعد عني ، وكانت محاولات تحديد أنف المروحية وإعادتها إلى الدورة التدريبية غير ناجحة ، لم يكن لدي خيار كيفية إلقاء الغاز والركض نحو نقطة تسقط من السماء. هنا
فيديو وصورة قصيرة بعد السقوط. ربما يكون هذا السلوك ناتجًا عن بوصلة غير دقيقة أو تداخل مغناطيسي ، أو أي شيء آخر ؛ بشكل عام ، اقرأ المعلومات على الإنترنت قبل الاستخدام وكن حذرا.
للمستقبل ، قد يكون من المفيد لك عدم حمل كمبيوتر محمول مع برنامج MultiWiiConf معك على الرحلات - يمكنك توصيل وحدة بلوتوث HC-05 بوحدة تحكم MultiWii (تتصل بموصل UART) ومن خلال تطبيقات Android (
تكوين MultiWii ومحطة
EZ-GUI الأرضية ) عبر البلوتوث يتصل المروحية ، ويقوم بعمل الإعدادات اللازمة ، مثل تلك الموجودة في MultiWiiConf.
الإجراء لبدء تشغيل المحركات هو كما يلي: قم بتشغيل الطاقة على المروحية (صرير) ، قم بتشغيل التطبيق ، خذ عصا الغاز من الموضع السفلي إلى اليمين - تبدأ المحركات (التغذية) وتدور في وضع الخمول ، الآن لإخراج الغاز بسلاسة ؛ لإيقاف المحركات ، خذ عصا الخنق من الموضع السفلي إلى اليسار - توقفت المحركات ، أوقف تشغيل قوة المروحية ، أوقف تشغيل التطبيق.
هذا كل شيء ، آمل أن تكون مقالتي مفيدة لك ، ولكن الآن يمكنك تثبيت المراوح وإعادة توجيه ، في حالتنا ، لأعلى ، حظًا سعيدًا وقلة سقوط.
فيديو قصير لرحلاتي الجوية
روابط التحميل:
الأرشيف - البرامج الثابتة MultiWii + برنامج MultiWiiConf
ملف Config.h بإعداداتي
دليل FlySky FS-T6
ملاحظة - تابع هنا:
"تثبيت FPV والقياس عن بعد على كوادروكوبتر"