الغرض الرئيسي من الوحدة هو التحكم في
المحركات المتزامنة الخالية من الفرشاة (BLDC ، BLAC ، PMSM ...) بجهد
شبه منحرف أو
جيبي ،
مع مستشعرات وضع السرعة أو
بدون مستشعرات . بالإضافة إلى ذلك ، تحتوي الوحدة على أبعاد صغيرة ، ومجموعة واسعة إلى حد ما من جهد الإمداد ، ومجموعة متنوعة من قنوات التصحيح ، والاتصالات السلكية واللاسلكية.
يمكن أن تكون قوة المحركات التي تتحكم فيها الوحدة في بضع مئات من الواط والجهد حتى 30 فولت. هذه محركات لآليات وأجهزة مختلفة ، مثل: الطابعات ثلاثية الأبعاد ، والأبواب الأوتوماتيكية ، والمصاريع الأوتوماتيكية ، والمضخات المستقلة ، والمراوح ، والأقفال ، والأدوات الكهربائية ، والمثبتات ، والمحركات والآليات المؤازرة لنماذج RC ، والروبوتات ، إلخ.
لكن هذا لا يقتصر على استخدام الوحدة. يمكن استخدامه مع الإضافات البسيطة للتحكم في الملفات اللولبية ، ومحركات السائر ، للتحكم في الإضاءة ، كشاحن قوي ، كمنظم للجهد ، كمصدر قوي للإشارات الصوتية ، كمحول عالي الأمبير مع عداد حالي ، وببساطة كمنصة تصحيح أخطاء.
باختصار ، يمكن أن تكون هذه الوحدة في منزل المهندس مفيدة جدًا.
يتم الحصول على جميع هذه الخصائص للوحدة بفضل دائرة نصف الجسر الكلاسيكية ثلاثية الطور مع مستشعرات التيار والجهد وجهاز التحكم الدقيق القوي.
(اضغط للتكبير)لتسريع عملية تطوير دائرة وحدة الطاقة ، تم أخذ أحد التصميمات القياسية التي اقترحتها TI كأساس.
استقرت على تصميم
لوحة TIDA-00901 .
(اضغط للتكبير)تتميز اللوحة بخصائص جيدة: التيار حتى 20 أمبير ، قوة المحرك حتى 200 واط ، الفولطية المقدرة 12 فولت. مصممة للتشغيل في السيارة.
كسائق لمفاتيح الطاقة ، يتم
استخدام رقاقة
DRV8305 . وقد أدت بعض عمليات البحث إلى استنتاج أن هذه هي واحدة من أفضل رقائق السائق لهذه التطبيقات.
من وثائق التطوير المفيدة للغاية
التصميم المرجعي لمحرك محرك BLDC للسيارات 12 فولت 200 واط (20 أمبير) .
تحتوي اللوحة على شكل دائري محدد ، يتم استخدام وحدة تحكم C2000 LaunchPad كعنصر تحكم. لسوء الحظ ، البرنامج غير مفتوح بالكامل فيما يتعلق بمكتبات التحكم في المحركات. يعتمد C2000 LaunchPad على عائلة معالج DSP F2802x Piccolo. إن عائلة المعالج هذه متخصصة في تطوير محولات الطاقة البسيطة ، ولا تختلف في العالمية والموارد.
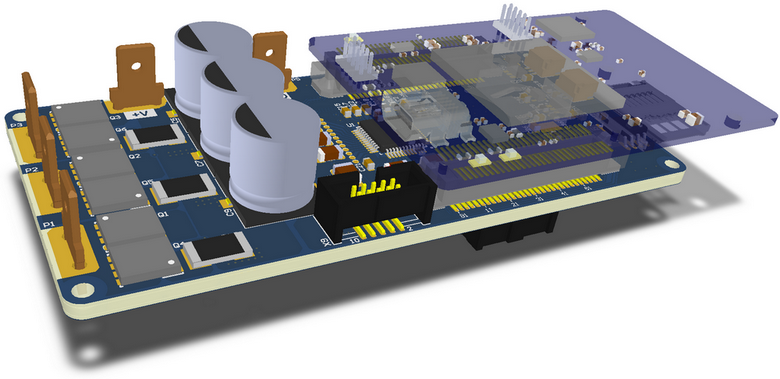
معمارية الوحدة.
في هذا المشروع ، تقرر تنفيذ الوحدة في شكل مركب مركب من لوحين. تحتوي اللوحة الرئيسية على مشغل طاقة ونظام فرعي للطاقة وبعض الوظائف الطرفية. يتم تثبيت لوحة المعالج على اللوحة الرئيسية. حسب اختيار المعالج
لوحة مشروع
K66BLEZ1 (المزيد من المقالات حول هذا المشروع -
1 ،
2 ،
3 ،
4 ) مع وحدة
تحكم دقيقة لعائلة NXP
Kinetis تعتمد على
نواة ARM Cortex-M4 . (
180 ميجاهرتز ، ذاكرة فلاش 2 ميجابايت ، ذاكرة وصول عشوائي سعة 256 كيلوبايت + بطاقة SD صغيرة ، ساعة ذاتية التشغيل ذاتيًا ، جهاز USB / سرعة عالية للمضيف ، شريحة Bluetooth LE 4 / ZigBee منفصلة )
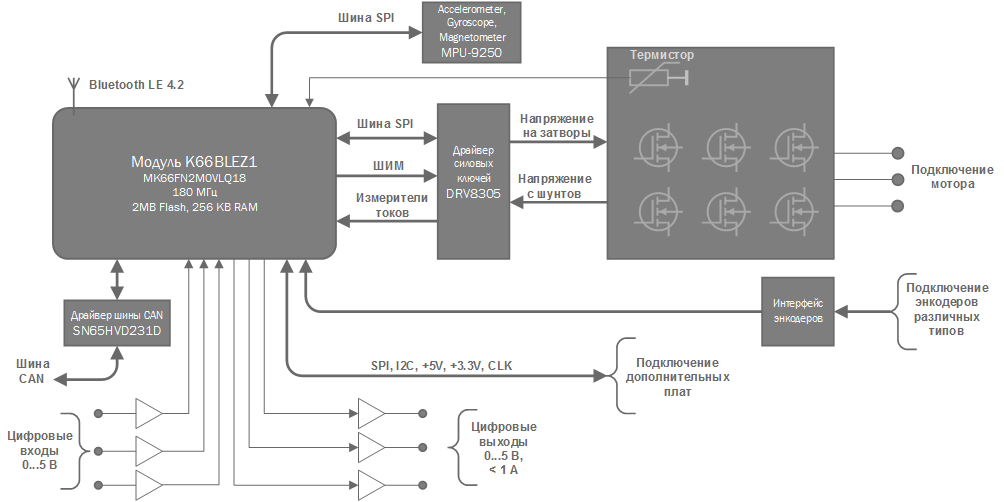
(اضغط للتكبير)يتم تشغيل الوحدة في نطاق الجهد
من 8.5 إلى 30 فولت. العديد من أجهزة استشعار درجة الحرارة - في وحدة التحكم الدقيقة ، بالقرب من مفاتيح الطاقة وواحد خارجي يحمي الوحدة والمحرك من ارتفاع درجة الحرارة الخطير. يتم اختيار القاعدة الأولية بالكامل للتشغيل عند
درجات حرارة تصل إلى -40 درجة. قتم تصميم مفاتيح التشغيل للتحكم في المحرك
لتيار نبضي يصل إلى 200 أمبير. يتم إجراء القياس الحالي من خلال تحويلات مقاومة مع 0.001 أوم. بفضل المضخمات القابلة للضبط المدمجة في رقاقة سائق DRV8305 ، فإن الوحدة قادرة على
قياس التيارات من 300 أ إلى 0.1 أ.يتيح ناقل CAN دمج العديد من هذه الوحدات النمطية في شبكة متزامنة مشتركة.
تعد رقاقة
MPU-9250 مفيدة إذا كنت بحاجة إلى التحكم في اتجاه الوحدة في الفضاء والملاحة بالقصور الذاتي ، وكذلك لمراقبة الاهتزازات والصدمات.
تم تصميم محول بجهد خرج 5 فولت مدمج في وحدة DC-DC
للتيارات حتى 3.5 أمبير. تستهلك الوحدة نفسها من هذا المحول ما لا يزيد عن 150 مللي أمبير ، ويمكن إعطاء ما تبقى من التيار الحالي لتحميل خارجي من الموصل X4. يعتبر موصل X4 مناسبًا لتوصيل عناصر الإضاءة والمؤشرات ، مثل شرائط RGB LED استنادًا إلى شرائح
WS2812B وما شابه ذلك. يدعم المعالج تكوين أجهزة بتات بروتوكول التشفير الرقمي بتنسيق
WS2812B ، بالإضافة إلى تشفير PPM و PCM و PWM. وبالمثل ، يمكن للوحدة استقبال إشارات PPM و PCM دون صعوبة مع أقل حمل للمعالج.
حساب الحد الأقصى لتردد التبديل والأساس المنطقي لاختيار ترانزستورات الطاقة
نقوم بإعادة فحص جدول مقارنة الترانزستور المقترح في
الوثيقة من TI . تتم إعادة كتابة جميع المعلمات من أوراق البيانات.
(اضغط للتكبير)هنا ، مثل متخصصي TI ، اخترت CSD1854Q5B. من حيث الحد الأقصى الحالي ، هذا هو الخيار الأفضل. ويتجاوز تردد التحويل البالغ 122 كيلوهرتز الحد المعقول الذي يمكن تحقيقه بالتحكم من عائلة كينيتيس.
حساب الحد الأقصى للتموج الحالي والأساس المنطقي لاختيار مكثفات المرشح
تؤثر التموجات الحالية بشكل مباشر على تسخين المكثفات وفترة خدمتها ، وخاصة المكثفات الإلكتروليتية. لذلك ، من الضروري اختيار المكثفات حسب النوع والتصنيف ، مع مراعاة عمر الخدمة المقدر والحد الأقصى للتيارات.
باستخدام هذه الصيغة ، يجب عليك التحقق مما إذا كانت الوحدة قادرة على التحكم في هذا المحرك دون تجاوز الحد الأقصى لتيارات المكثف.
كما حسب خبراء TI ، مع المكثفات الموضحة في الرسم البياني ، يمكن لوحدة بتردد PWM 40 كيلو هرتز أن تزود محركًا مغلقًا بتيار من خلال اللفات أكثر من 80 أمبير لفترة طويلة.
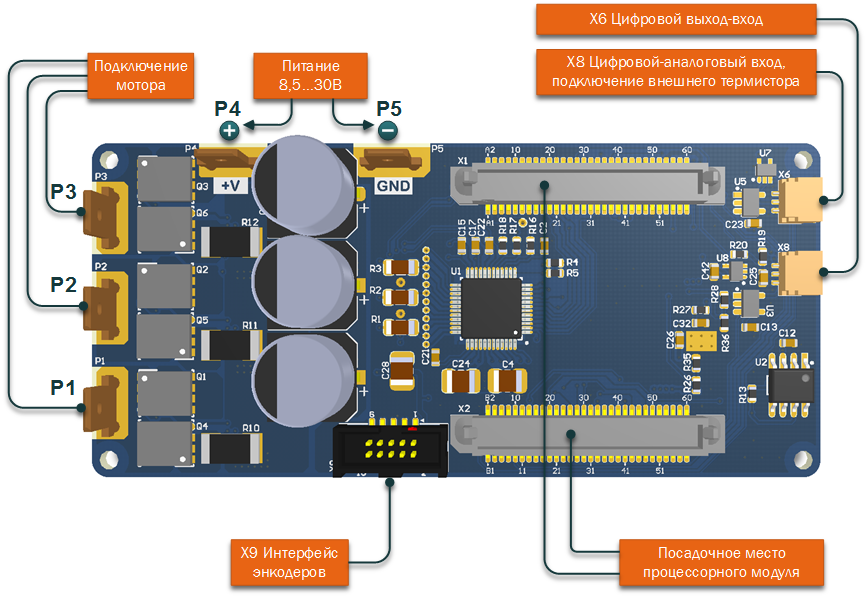
رسم تخطيطي للوحة الرئيسية
(اضغط للتكبير)(اضغط للتكبير)موقع الموصل
منظر علوي للوحة الرئيسية:
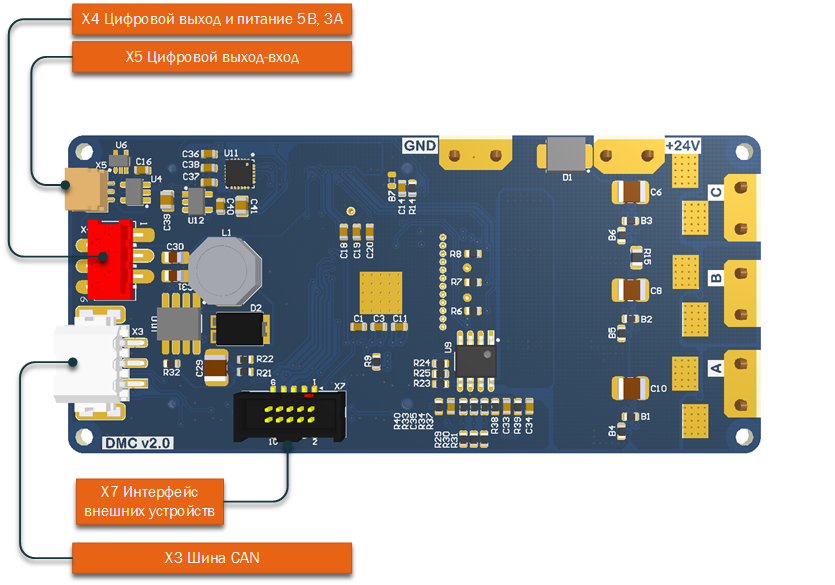
(اضغط للتكبير)عرض اللوحة الرئيسية من الأسفل
(اضغط للتكبير)الأبعاد
(اضغط للتكبير)مستودع المشروع
يتم تخزين جميع المواد المتعلقة بالمشروع
هنا .
تم تطوير الدائرة ولوحة الدائرة في Altium Designer 17.0.6.
في المستودع ، يمكنك العثور على
نموذج التجميع
ثلاثي الأبعاد بتنسيق STEP.
يوجد أيضًا
ملف حساب لمحول DC-DC على A8586 بتنسيق Mathcad.
سيتم النظر في جزء البرنامج من المشروع في المقالة التالية.