مرحبا بالجميع. اليوم سنتحدث عن رئيس روبوت أوسكار الترويجي. غالبًا ما يهتم الناس بالتواصل مع الروبوت كما لو كانوا من نوعها: النظر في الوجه والبحث عن استجابة عاطفية أثناء الحوار. لذلك ، يجب أن يصبح رئيس الروبوت الترويجي أحد العناصر الرئيسية التي تجذب انتباه الإنسان.
من أجل أن "يأتي إلى الحياة" ، حددنا المتطلبات التالية:
- يجب أن يتمتع الرأس بدرجتين من الحرية: الإمالة والدوران
- يجب أن يكون هناك رئيس محاور تتبع
- يجب أن تستجيب عيون الروبوت إلى المحاور
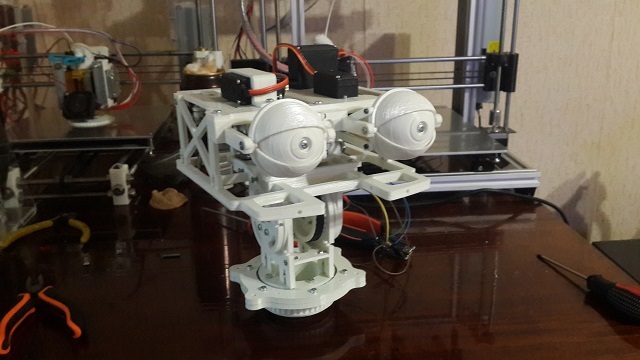
من الناحية الهيكلية ، تم تقسيم الرأس إلى قسمين:
تصميم الرأس
بادئ ذي بدء ، بدأنا بتصميم الرأس من أجل فهم عامل الشكل وكيفية وضع كل ما هو مطلوب في الرأس. بشكل عام ، هذه العملية متكررة وصعبة للغاية في بعض الأحيان ، خاصة للمهندسين الذين صمموا التروس سابقًا فقط.
بعد تكررين ، حصلنا على رسم تخطيطي ، أخذ في الاعتبار تقريبًا موقع الماكينات وآليات العيون.
العنق
تم تجهيز رأس الروبوت بدرجتين من الحرية: إمالة الرأس وإدارته. أساس تصميم الرقبة هو الأضلاع والأضلاع ، التي استخدمناها بالفعل في
المعالج .
للتحكم في درجات الحرية ، يتم استخدام خادمنا المخصص. سنقوم بتدوير رأسنا من خلال السرعة ، أي تعتمد سرعة دوران الرأس على الموضع في إطار الشخص الذي يتم تعقبه ، حيث أن الخادم قادر على التحكم في السرعة. كلما كان الوجه بعيدًا عن المركز ، كلما كان الرأس أسرع. كلما اقتربت من المركز ، ستنخفض السرعة إلى الصفر. وبالتالي ، تحصل على دوران سلس إلى حد ما للرأس.
عيون
هنا أيضًا ، لم نرغب في قضاء الكثير من الوقت ، لذلك قررنا البحث عن المشاريع الحالية للعيون المتحركة ، من الجيد أن تكون هذه المشاريع عربة وعربة صغيرة. من بين تلك التي وجدناها ، أود أن أشير بشكل خاص إلى
مشروع واحد .
أخذنا ذلك كأساس. وكان كل شيء على ما يرام حتى بدأنا في محاولة الجمع بين ميكانيكا العين وتصميم الرأس الحالي وآليات الرقبة. في النهاية ، كان عليّ تطوير "دراجتي" الخاصة. وكانت النتيجة تصميم العين:

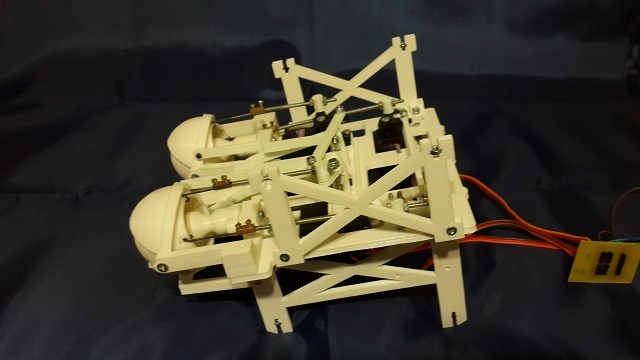
يتم تشغيل العيون بواسطة arduino_nano. للسيطرة على الخدمة ، أخذوا
المكتبة القياسية. تعمل أجهزة Servas من مصدر طاقة منفصل ، ولا يستطيع arduino إعطاء تيار كافٍ. في البداية كانت هناك مشاكل بسيطة مع "الارتداد" الذي أفسد الجماليات كلها. ثم وجدوا السبب - منظم طاقة رديء الجودة ، واستبداله بمنظم
آخر مماثل - اختفت المشكلة. وهنا شيء آخر ، لا تحب أجهزة الهوايات الهوايات الأسلاك الطويلة ، لذلك قمنا بإزالة الطول الإضافي بين الماكينات وأجهزة التحكم. يتم تنفيذ حركة العين عن طريق تحديد زاوية دوران المؤازرة.
كاختبار ، سنستخدم الشخص الثاني من دولتنا - دميتري أناتوليفيتش ميدفيديف. فجأة ، بالنسبة للعمل الشاق ، سوف "تسقط" منحة لتطوير المشروع على رأسه.
كيف يعمل؟
كل هذا يعمل ببساطة ، لأنه يجب أن يستجيب الرأس والعينان لشخص ما ، ثم يكون مصدر المعلومات متطابقًا بالنسبة لهم - كاميرا فيديو تقع في رأس الروبوت. تستخدم الكاميرا من التوت. بالمناسبة ، هنا قمنا بخلل صغير - أخذنا كاميرا بزاوية عرض صغيرة. أثناء الاختبار ، أصبح من الواضح أنه من الضروري وضع كاميرات واسعة الزاوية - ثم يمكن جعل تعابير الوجه أكثر حيوية ، لأن سيكون من الممكن النظر إلى زاوية أكبر.
يتم استخدام Raspberry Pi 3 كمعالج للصور. أود أن أقول إن Malinka تتعامل مع هذه المهمة بثقة ، ولكن هذا صحيح بدقة منخفضة ، مع إعطاء حمل ملحوظ على جميع النوى الأربعة.
يتم الكشف عن الوجوه بواسطة أداة كلاسيكية - سلسلة هار. علاوة على ذلك ، فإن تكرار اكتشاف الوجه هو 9-12 إطارًا في الثانية.
عن طريق القياس مع شخص ما ، ينظر الروبوت أولاً إلى المحاور ، ثم يدير رأسه إليه. على الرغم من سرعة دوران الرأس العالية نسبيًا المتاحة ، إلا أننا أبطأناها. بجلب سرعة دوران الرأس وفقًا لسرعة اكتشاف الوجوه ، حصلنا على حركات سلسة ورشيقة.
كنا راضين عن رؤوسنا المجمعة. ما رأيك؟ ماذا يمكنني أن أضيف أو أفعل؟
ما هي الخطوة التالية؟
الآن نحن نكمل تجميع المناور الثاني ، وبعد ذلك سننتقل إلى تصنيع منصة مع جذع. وكل هذا يجب أن يتم الكشف عنه في مبنى لائق. دعونا نأمل في المقالة التالية أن نعرض أفكارنا كاملة.
يمكنك البقاء هنا ، كل التوفيق لك ، المزاج الجيد والصحة!