تاريخياً ، بدأ استخدام الروبوتات بالإنتاج. أولاً ، تم إنشاء الروبوتات لأداء العمليات الفردية ، ثم مواقع الإنتاج الآلية ، وأخيرًا أنظمة الإنتاج المرنة. تسمح لنا تجربة عملياتهم بالاستنتاج أنه في المستقبل القريب يمكن زيادة حجم المنتجات عدة مرات دون زيادة تكلفة العمالة البشرية. لكن هذا الإنجاز الذي لا شك فيه للتقدم العلمي والتكنولوجي يثير ليس فقط الآمال بالوفرة التي طال انتظارها ، واختفاء الفقر ، وما إلى ذلك ، ولكن أيضًا لمخاوف معينة.
 الإنتاج الآلي [1]
الإنتاج الآلي [1]في الواقع ، لا شيء يخرج من لا شيء. إذا زاد الاستهلاك عدة مرات ، فسيكون مطلوبًا نفس الكمية من الموارد. والبيئة تتعرض بالفعل لضغوط حرجة من البشرية. وفقًا للإحصاءات ، ينتج شخص واحد حاليًا حوالي 3-5 لترات من القمامة يوميًا ، وهو ما يصل إلى 120 لترًا في الشهر ، و 1500 لترًا سنويًا [9 ، يتم تصحيح خطأ المصدر بسبب مراقبة dragonnur]. حتى مضاعفة الإنتاج تعني إثارة كارثة بيئية. اتضح أن الروبوتات تشبه إلى حد ما الأسلحة النووية - مع إمكانات هائلة (في حالة الأسلحة المدمرة ، للروبوتات الإبداعية) استخدامها على نطاق واسع أمر مستحيل بسبب العواقب المأساوية العامة.
 صوره من فيلم "Landfill" 2014 [2]
صوره من فيلم "Landfill" 2014 [2]لحسن الحظ ، الروبوتات ليست قنابل نووية حرارية ، وهناك مخرج من التناقض بين الاحتمالات والعواقب. هذا المخرج هو الروبوتات نفسها ، تم تكييفها للتخلص من نفايات الإنتاج والاستهلاك. وفقا للمبدأ القديم ، مثل يعامل مثل. إذا قمنا بمضاعفة الإنتاج وفي نفس الوقت أنشأنا مثل هذه الأنظمة الآلية التي ستستخدم وتحول 50٪ من النفايات إلى مواد أولية أو طاقة ثانوية ، فلن يتغير الحمل البيئي. إذا وصل مستوى الاستخدام إلى 67٪ ، فيمكن مضاعفة الإنتاج ثلاث مرات. وهكذا دواليك.
بطبيعة الحال ، هذا مخطط فظ للغاية. من الناحية العملية ، من الضروري مراعاة طرق وأحجام محددة للتخلص ، وتكلفة تصنيع معدات إضافية ، والعديد من العوامل الأخرى. ولكن من الواضح أن الزيادة في الاستهلاك ترتبط ارتباطًا وثيقًا بدرجة معالجة النفايات. وبما أن المجتمع الذي يتمتع بمستوى مرتفع من الاستهلاك ليس جاهزًا للغاية للقيام بالأعمال اليدوية القذرة ، سيتعين على الروبوتات العمل بجد. وقد بدأوا العمل بالفعل.
يمكن تقسيم مهمة التخلص من النفايات إلى ثلاث مهام فرعية:
- جمع النفايات ؛
- تصنيفهم ؛
- إعادة تدوير النفايات.
لنبدأ بالأول. الآن لن تفاجئ أي شخص باستخدام مكنسة كهربائية روبوت أو روبوت لغسل النوافذ. لكن هذه أبسط روبوتات لجمع النفايات. لكن ، بالطبع ، قدراتهم محدودة للغاية ، والنفايات المقابلة - بشكل رئيسي غبار المنزل والغبار في الشوارع - ليست ذات أهمية من وجهة نظر المزيد من التخلص منها.
 مكنسة كهربائية IClebo Pop Robot [3]
مكنسة كهربائية IClebo Pop Robot [3] روبوت غسل النوافذ Windoro WCR-I001 [4]
روبوت غسل النوافذ Windoro WCR-I001 [4]لكن سلة المهملات "المتجولة" هي بالفعل أكثر فعالية من المعتادة. في المختبر لتطوير التفاعلات والاتصالات في الجامعة التكنولوجية اليابانية في تويوهاشي ، تم إنشاء صندوق صغير لقاعدة العجلات. يطلق عليه صندوق المهملات الاجتماعي (STB). تم تجهيز الروبوت بمعالج دقيق وكاميرا فيديو ومكبر صوت ، بالإضافة إلى مستشعرات الأشعة تحت الحمراء ومستشعر المسافة.
 صندوق القمامة الاجتماعي [5]
صندوق القمامة الاجتماعي [5]يبدأ الروبوت نشاطه النشط من خلال تحديد المكان الذي يتواجد فيه الأشخاص في الوقت الحالي. يحدث هذا باستخدام مستشعر الأشعة تحت الحمراء الذي يستجيب لحرارة أجسامهم. جهاز استشعار المسافة مسؤول عن سلامة تحريك الروبوت بين الناس. للبحث عن القمامة نفسها ، يستخدم STB كاميرا مدمجة مع خوارزمية التعرف على الكائنات.
عندما يجد الروبوت القمامة ، فإنه يبدأ في تنفيذ "حركات الجسم" النشطة وإصدار إشارات صوتية. وهكذا ، "يطلب" من الناس التقاط القمامة ورميها في الحاوية.
ستتيح لك مستشعرات الأشعة تحت الحمراء الموجودة في الجزء العلوي من الدلو معرفة ما إذا كانت القمامة قد وصلت بالفعل إلى حيث يجب. يمكن للروبوت حتى إمالة الدلو قليلاً في أي اتجاه ليسهل على الشخص إكمال مهمته. بشكل عام ، لدينا تعاون نشط بين الإنسان والآلة في الحفاظ على البيئة. علاوة على ذلك ، لا يعمل الروبوت فقط كمجمع للقمامة ، ولكنه يعمل أيضًا كساعة منبه لضمير العشاق إلى القمامة في أي مكان.
ولكن مثلما لا يمكن أن يجرف البحر ، لذلك لا يمكن جمع كل القمامة في سلال صغيرة. لهذا ، هناك حاجة إلى وحدات أكثر قوة. على سبيل المثال ، تلك التي تم تطويرها واختبارها في إطار مشروع DustBot (www.dustbot.org) لتطوير تقنيات التنظيف الآلي وجمع القمامة على نطاق مدينة صغيرة. يشارك فيها العديد من الخبراء من إيطاليا وإسبانيا وبريطانيا وسويسرا والسويد ، ومع ذلك ، فإن الدور الرائد ينتمي إلى باحثين من المدرسة العليا في سانت آن (Scuola Superiore Sant'Anna) ، الموجودة في بيزا. المشروع مدعوم ماليا من قبل المفوضية الأوروبية.
الروبوت الأول ، المسمى DustClean ، هو مكنسة مستقلة مجهزة بفرش دوار ومكنسة كهربائية. ينظف DustClean الشوارع ويتجول في المدينة على طريق معين ، بينما يتوقف أمام المشاة ويتجنب العقبات.
 دوست كلين روبوت [6]
دوست كلين روبوت [6]يمكن استدعاء الروبوت الثاني ، المسمى DustCart ، زبال. يجمع أكياس القمامة من سكان الحضر ويأخذها لإعادة التدوير. يبلغ ارتفاع الروبوت 150 سم ووزنه 70 كجم وسرعته 1 م / ث. يكفي شحن بطارية واحدة لمسافة 16 كم.
 دوست كارت روبوت [6]
دوست كارت روبوت [6]لكي تصل شاحنة القمامة الآلية إلى وجهتها ، يجب الاتصال بها عبر الهاتف. بعد وصول الروبوت ، يقوم العميل بإدخال رمزه الشخصي من خلال الشاشة في علبة DustCart. هذا ضروري ، لأنه من المفترض أن يتم دفع مثل هذه الأنظمة في المستقبل. في الوقت نفسه ، يمكن للشخص اختيار طرق مختلفة لمزيد من نقل القمامة ، بالإضافة إلى نوع القمامة (النفايات العضوية أو الزجاج أو البلاستيك أو الورق). بعد الانتهاء من التلاعب ، يضع العميل كيس القمامة في الفتحة الافتتاحية للروبوت ، ويذهب إلى نقطة جمع النفايات ، حيث يفرغ الحقيبة.
لا تستطيع الروبوتات من مشروع DustBot حل مشكلة جمع القمامة بشكل كامل. الغرض منها أكثر تواضعا - العمل في الأماكن التي لا تناسب معدات التنظيف التقليدية. وهناك الكثير من هذه الأماكن في المدن الأوروبية. بالإضافة إلى ذلك ، تم تجهيز الروبوتات بأجهزة استشعار تحدد محتوى البنزين وأكاسيد النيتروجين والكربون والكبريت في الهواء وأجهزة استشعار درجة الحرارة.
أجريت الاختبارات الميدانية ل DastBusts في بلدة Pechcholi الإيطالية. كومونة Pechcholi هي أول مستوطنة في العالم حيث تم تخصيص ممر منفصل على الطرق لحركة الروبوتات.
 DustCart في عجلة من امرنا لاختيار الجزء التالي من القمامة [7]
DustCart في عجلة من امرنا لاختيار الجزء التالي من القمامة [7]التالي على مقياس بعد DustBot سيكون الروبوت ROARY الذي أظهرته فولفو. تم إجراء التطوير بالتعاون مع متخصصين من جامعة تشالمرز للتكنولوجيا ، وجامعة مالاردالين وجامعة بنسلفانيا. يوضح المشروع إمكانيات العمل المشترك بين روبوتين ، مما سيساعد في المستقبل على تسهيل العمل اليومي لعمال المدن.
 أعمال ROARY ، طائرة استطلاع بدون طيار تتجسس في مكان قريب [8]
أعمال ROARY ، طائرة استطلاع بدون طيار تتجسس في مكان قريب [8]يتم نقل ROARY على منصة خاصة مثبتة في الجزء الخلفي من شاحنة القمامة. شاحنة القمامة نفسها بالكاد مرئية على اليمين ، لذلك قد تعطي انطباعًا خاطئًا بأن ROARY مستقل تمامًا. في الواقع ، استقلاليتها أقل بكثير من DustBots.
عند الوصول ، يقوم المشغل بتنشيط مركبة جوية بدون طيار مثبتة على سطح السيارة ، وبعد ذلك تقوم الطائرة بدون طيار بمسح المناطق المحيطة للكشف عن حاويات القمامة. يقوم النظام بنقل البيانات حول موقع الخزانات إلى الروبوت ، الذي يقوم بتحميل حاوية القمامة على منصة خاصة ، ويعود إلى شاحنة القمامة ويرفع الخزان ، وينظفه من الحطام. بشكل عام ، يناسب ROARY الجزء الأكثر صلابة وقذارة من وظيفة زبال.
للتنقل في التضاريس ، يستخدم ROARY نظام تحديد المواقع العالمي والليدار ، مما يسمح له بتجنب الاصطدام بالعقبات. باستخدام الكاميرا المدمجة ، يمكن لـ ROARY اكتشاف جسم يقع بشكل خطير بالقرب من شاحنة القمامة أثناء تفريغ الحاوية ، وستحذر وظيفة التوقف التلقائي في حالات الطوارئ من العواقب المحتملة غير السارة. يمكن استخدام إيقاف تشغيل الطوارئ من قبل مشغل شاحنة القمامة.
بشكل عام ، استنادًا إلى الأنظمة الثلاثة التي تمت مراجعتها ، فإن الروبوتات قادرة تمامًا على التعامل مع جمع القمامة. خاصة إذا ساعدهم الناس قليلاً. هذا عادل - يجب على الجميع التنظيف بعد أنفسهم. لكن لا أحد ملزم بالتنظيف بعد الآخرين ، ناهيك عن جمع النفايات المتراكمة على مر السنين ، من قبل أي شخص. لذلك ، سيكون عليك الرجوع إلى الروبوتات مرة أخرى. وبشكل أكثر تحديدًا ، نظام ZenRobotics Recycler (ZRR) الذي طورته شركة ZenRobotics الفنلندية.
حاليًا ، يتم تنفيذ المنهجية الكلاسيكية للفرز المسبق للقمامة على عدة مراحل:
- فرز المعادن / غير المعدنية باستخدام مغناطيسات كهربائية قوية.
- الفرز ثقيل / ليس ثقيلًا عن طريق نفخ الهواء.
- المرحلة اليدوية.
في المرحلة الثالثة ، هناك أشخاص في الناقل يقومون بفرز القمامة بمساعدة بعض المعلومات الموجزة والمهارات المكتسبة. بعد ذلك ، يتم إرسال النفايات الموضوعة في حاويات مختلفة إلى مصانع خاصة لإعادة التدوير أو الوقود الحيوي. قررت ZenRobotics إنقاذ الأشخاص من الأعمال القذرة والرتيبة من خلال إنشاء تقنية روبوتية خاصة يمكنها الجمع بين جميع المراحل الثلاث في مرحلة واحدة.
صحيح ، حتى الآن هذا يتعلق أساسًا بمخلفات البناء ، وبشكل أكثر تحديدًا حول جبال القمامة المتبقية بعد هدم المباني القديمة. يتكون ZRR من 3 أجزاء رئيسية. أولاً ، هؤلاء هم المتلاعبون ، وهم روبوتات صناعية قياسية. ثانيًا ، هذه أجهزة استشعار للتعرف على شظايا الحطام - كاميرات فيديو من مختلف الأنواع وأجهزة الكشف عن المعادن. أجهزة الاستشعار ثابتة. ثالثا الحواسيب الصناعية. أساس "الذكاء" ZRR هو برنامج يتم تحديثه بانتظام من قبل الشركة عبر الإنترنت.
يظهر جهاز ZRR بوضوح في الشكل الذي يصور النموذج الأولي الحالي لنظام صناعي كامل. يتم نقل نفايات البناء تحت كتلة المستشعر باستخدام ناقل. تتعرف أجهزة الاستشعار على كل جزء من القمامة وتنقل معلومات حول موقعها على الناقل والحجم والمواد - الطوب والخشب والتعزيز وما إلى ذلك إلى نظام التحكم في المناول.
 النموذج الأولي الحالي ZRR [9]
النموذج الأولي الحالي ZRR [9]عندما تصل الشظايا إلى منطقة عمل المناول ، يبقى فقط الانتقال إلى الوضع المحسوب بالفعل ، وفتح القابض وفقًا لحجم القطعة ، وإزالة الجزء من الناقل ورميه في الحاوية بالجزء المناسب.
من الممكن ألا تتعرف أجهزة الاستشعار بشكل موثوق على بعض أجزاء الحطام. في هذه الحالة ، لن يقوم المتلاعبون بفرزها بشكل عشوائي. سيتم تسليم الأجزاء غير المعروفة من قبل الناقل إلى مجموعة خاصة ، حيث سيتم تغذيتها مرة أخرى إلى بداية الناقل ، تحت أجهزة الاستشعار. على الأرجح ، مع موقع مختلف على الشريط ونسبًا لبعضها البعض ، يمكن التعرف على هذه الأجزاء بشكل صحيح. ستستمر العملية حتى تتحلل مجموعة القمامة بالكامل إلى كسور.
نظام ZRR التجاري أكثر من مستوى النموذج الأولي ، فهو يتضمن اثنين على الأقل من المتلاعبين والحاويات الضخمة.
 مناورات ZRR في العمل [10]
مناورات ZRR في العمل [10] ZRR في النسخة التجارية الدنيا [10]
ZRR في النسخة التجارية الدنيا [10]بناء على ZRR ، يمكن بناء أنظمة فرز متعددة المراحل. تعمل التركيبات المنفصلة في مثل هذا النظام بشكل متسلسل - إذا تم تخطي أي جزء من القمامة بواسطة التثبيت الأول ، فإن الثاني على الأرجح سيتعامل معه.
يمكن لبرامج ZRR اتخاذ قرارات مستقلة والدراسة الذاتية. لذلك ، فإن التدخل البشري في النظام ضئيل ومطلوب فقط للفشل.
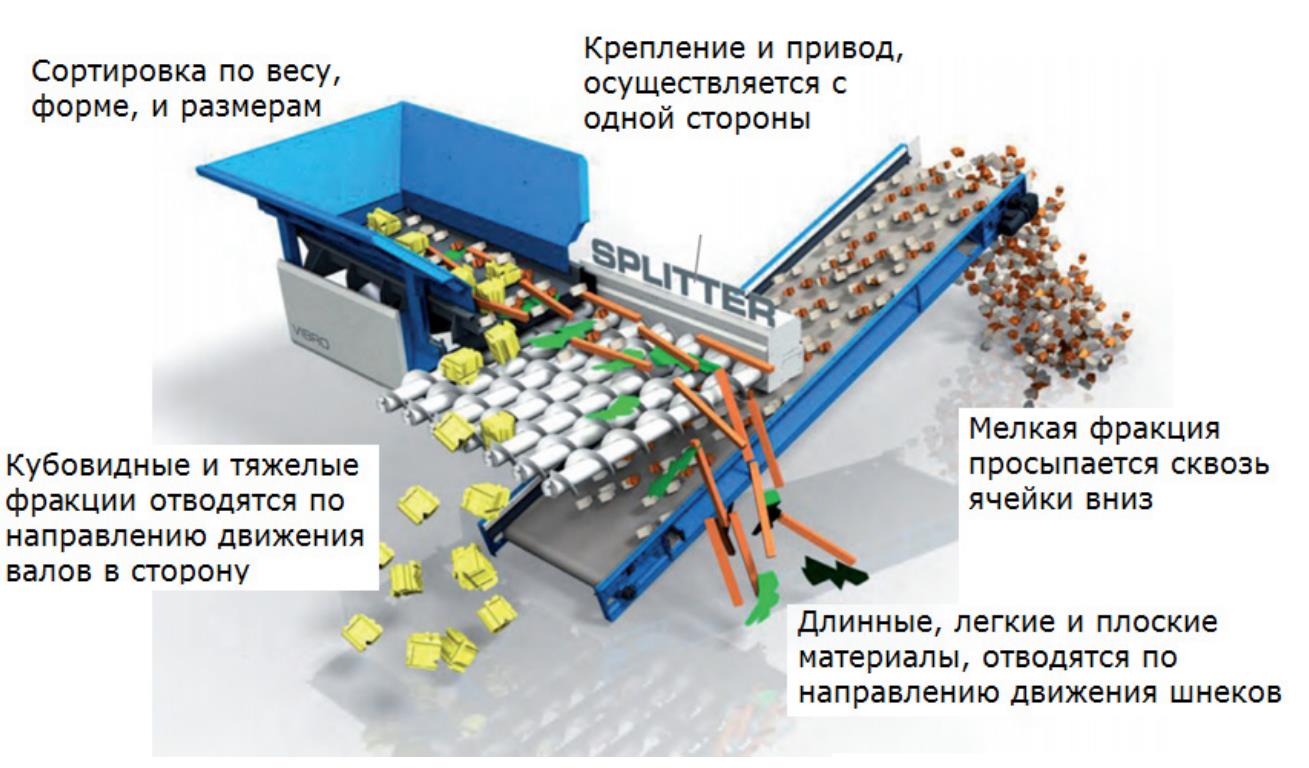
في الإنصاف ، تجدر الإشارة إلى أن ZRR ليس الحل الوحيد الممكن لفرز القمامة دون مشاركة (أو مشاركة ضئيلة) من شخص. لذا ، قامت الشركة الألمانية GUNTHER ENVIROTECH بتطوير محطة فرز خاصة SPLITTER لفرز النفايات الصلبة البلدية. لا يستخدم هذا التثبيت أجهزة استشعار ومعالجات وبرامج معقدة. يتم استبدالهم جميعًا ببراغي وأعمدة ذات شكل خاص ، والتي تسمح لك بتقسيم القمامة إلى 3 كسور حسب الشكل والحجم والوزن.
 تثبيت SPLITTER [11]
تثبيت SPLITTER [11]على الرغم من بساطة التصميم وأصالته ، فمن الواضح أن SPLITTER قادر على تنفيذ الفصل الأولي الخام فقط من القمامة إلى كسور. إذا كان من الضروري إجراء فرز إضافي ، يلزم وجود نظام من النوع ZRR. وبالتالي ، فإن هذه التقنيات لا تتنافس كثيرًا بقدر ما تكمل بعضها البعض في حل المشكلة التي حددناها في بداية المقالة - إعادة تدوير النفايات بما لا يقل عن 2/3 باستخدام الروبوتات.
ومن ثم اتضح أنه ، بالحديث عن التخلص من القمامة بنسبة 2/3 ، فإننا نقلل بشكل كبير من قدرات التقنيات المتاحة. لأن الأنظمة تعمل بالفعل ، مما يسمح برفع معدل الاستخدام إلى 97٪!
في أوائل التسعينات ، بدأت مجموعة من العلماء الهولنديين في البحث والتطوير لتكنولوجيا جديدة ، كانت مهامها الرئيسية معالجة النفايات دون فرز أولي ، والحصول على مواد خام عالية الجودة (بما في ذلك المنقية من المواد السامة والضارة) ، بالإضافة إلى فعالية التكلفة ، الربحية ، وفي نفس الوقت ، السلامة البيئية.
في عام 2000 ، حقق العلماء هدفهم واختبروا وسجلوا براءة اختراع ما يسمى بتقنية "3R" ، مع الجمع بين جميع المبادئ المذكورة أعلاه [12]. يتم تشغيل التكنولوجيا من قبل مجموعة EPC.
إن مصنع إعادة تدوير القمامة الذي تم بناؤه على أساس مبادئ 3R قادر على معالجة:
- النفايات المنزلية ؛
- قمامة ضخمة غير مقطعة (أثاث ، مواد بناء ، إلخ) ؛
- النفايات العضوية
- محتويات مدافن النفايات ؛
- السيارات المفككة وأجزاء الشاحنات والبطاريات والإطارات ؛
- المعدات الإلكترونية والكهربائية (تلفزيونات وثلاجات وما إلى ذلك) ؛
- النفايات الطبية ؛
- النفايات الصناعية ؛
- البطاريات وموازين الحرارة والمصابيح
وغير ذلك الكثير.
اعتمادا على المهام ، تم تجهيز المصنع بالوحدات المستقلة اللازمة.
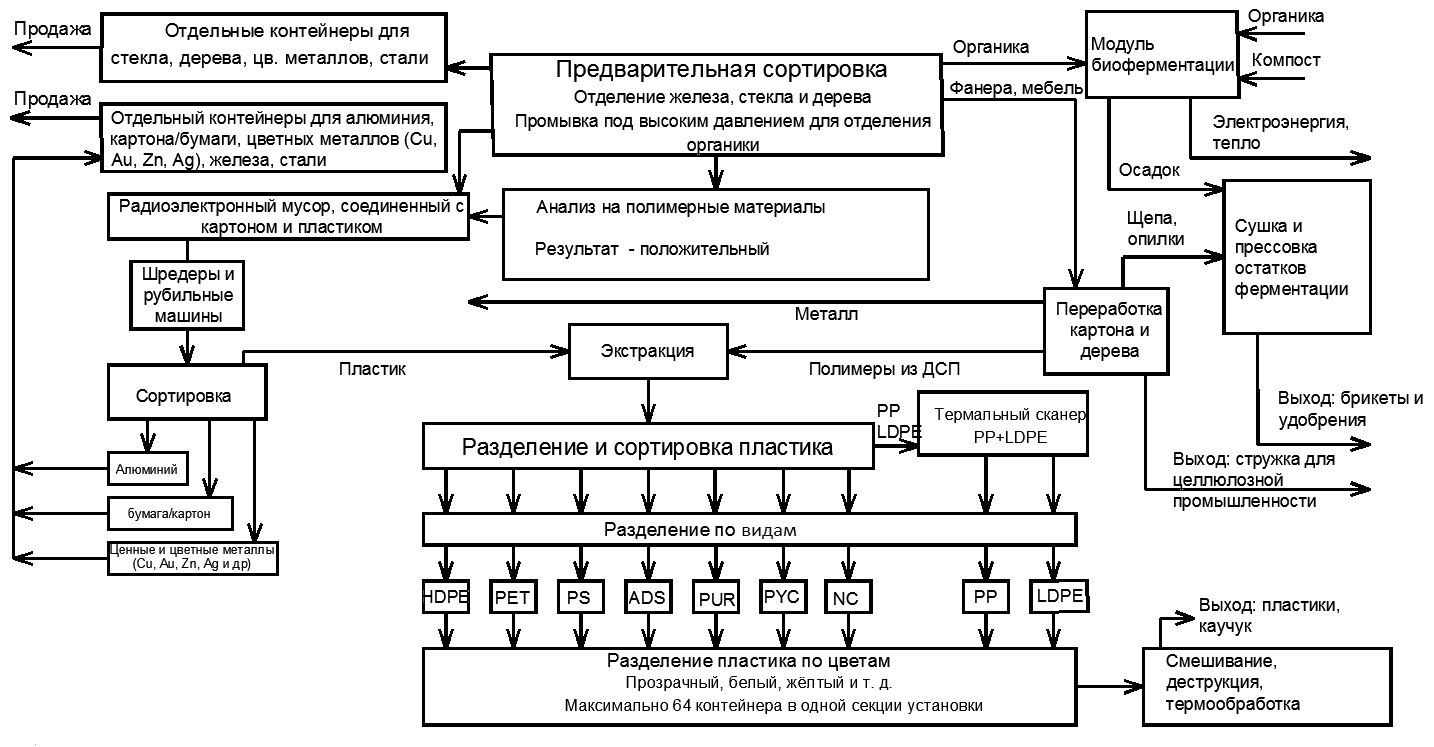 مخطط عام لمعالجة النفايات باستخدام تقنية "3R" [12]
مخطط عام لمعالجة النفايات باستخدام تقنية "3R" [12]في مرحلة التصميم ، يتم تحليل النفايات المعدة لإعادة التدوير في النظام. وبالتالي ، يتم تحديد التركيبة النوعية لحساب الفعالية والاسترداد ، والتي يمكن أن تضمنها الشركة المصنعة ، بالإضافة إلى وجود مواد خطرة أو مشعة في تكوينها.
فيما يلي عملية معممة لإعادة التدوير في مصنع 3R.
- يتم فرز النفايات غير المصنفة تلقائيًا في المصنع مباشرة. لا يلزم إجراء تحليل إضافي للنفايات قبل التسليم إلى المصنع.
- تبدأ عملية إعادة التدوير بفصل المكونات غير البلاستيكية والكهربائية والإلكترونية. بعد ذلك ، يتم فصل المواد المغناطيسية ، وكذلك الخشب والزجاج. كلها معبأة في حاويات للبيع أو المعالجة. في هذه المرحلة ، من الممكن الاندماج في تقنية "3R" للأنظمة من نوع ZRR لتحسين الجودة وأتمتة الفرز بشكل كامل.
- يتم تحليل النفايات المتبقية التي تحتوي على البلاستيك من أجل الجودة ودرجة التآكل. بعد ذلك ، يذهبون إلى المروحيات.
- الفرز الثاني للمواد المسحوقة بالفعل: يتم فصل المعادن والورق والكرتون وجاهزة للبيع.
- يتم تنظيف البلاستيك من المنتجات المتبقية في النازع. يتم عزل الأصباغ من المواد ويمكن إعادة استخدامها.
- يتم فرز البلاستيك حسب النوع - PET ، PVC ، HP ، HDPE ، PURE ، ABS ، إلخ. تشتمل وحدة معالجة البلاستيك على ما يصل إلى 64 حاوية لفصل أنواع مختلفة من البلاستيك. يتم فصل البلاستيك باستخدام ماسح حراري يعتمد على مؤشر الذوبان ، حيث أن كل نوع له درجة حرارة انصهار خاصة به.
- يتم فرز البلاستيك المقسم حسب النوع أيضًا حسب اللون.
- الخلط والضغط: يتم تحضير البلاستيك للبيع مع مراعاة متطلبات العملاء.
- تخمير الغاز - يتم جمع المواد العضوية لإنتاج الوقود الحيوي.
- تتم معالجة وتنظيف أنواع مختلفة من الخشب لمزيد من الاستخدام في صناعة اللب والورق.
- يتم تسليم البقايا الخام من تخمير الغاز والرقائق من الورق المقوى والخشب إلى قالب فحم حجري ، حيث يتم تجفيف الكتلة ، وطحنها وضغطها في قوالب الوقود. يمكن استخدام القوالب أيضًا في الزراعة والصناعة الزراعية كسماد.
لاحظ أن الغاز الحيوي من وحدة التخمير يستخدم لتوليد الطاقة. وبالتالي ، فإن كمية الطاقة المستلمة لا تعتمد بشكل مباشر على النسبة المئوية للمواد العضوية في النفايات المتلقاة في المصنع ، ولكن فقط على وقت وكثافة التخمير. لذلك ، يمكن جعل المصنع ليس مستهلكًا ، ولكن مورد طاقة (بما في ذلك لنفسه) في أي حال تقريبًا.
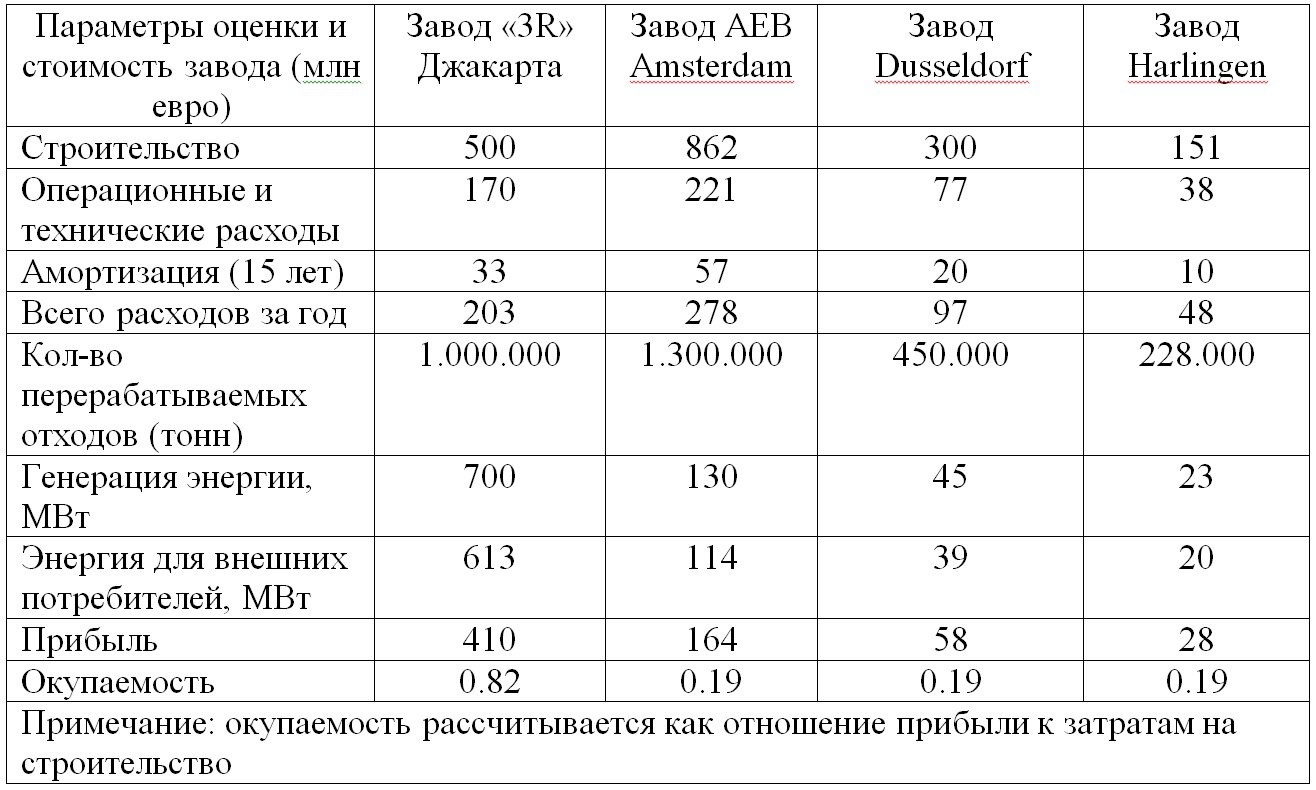
استنادًا إلى تقديرات EPC Group ، عند معالجة 100 كجم من النفايات ، نحصل على 97 كجم من المواد الخام النهائية عالية الجودة (يعتمد إنتاج وجودة المواد الخام على نوع النفايات التي يتم تسليمها إلى النظام) ، وسيصل عائد المشروع إلى 30-50 ٪ سنويًا.
باستخدام تقنية 3R ، تم بالفعل بناء العديد من مصانع إعادة تدوير القمامة ، بما في ذلك في دوسلدورف وأمستردام وهارلينجن. مصنع قيد الإنشاء في جاكرتا. [12].
, «3R» , .
, , , , . , . , , , -, -. - .