ماذا يفعل المطور في ساعات الترفيه النادرة؟ هذا صحيح ، تصفح قوائم أسعار متاجر الحديد. كانت هناك دقيقة مجانية وقررت أن أنظر عبر صفحات المتاجر الشهيرة على الإنترنت - الملل ، لا شيء مثير للاهتمام ، لقد رأينا كل هذا بالفعل ... ثم فجأة تسقط عيني على ميجا التالي. باه! نعم ، إنها ليست مجرد ميجا ، ولكنها مدمجة مع ESP8266 المحبوب لدى الجميع ومجهزة بعناية بمفاتيح لوحدتي تحكم للعمل معًا - سلكيًا (باستخدام Ethernet Shield) مع الكثير من GPIO و Wi-Fi للاتصال اللاسلكي.
ليس سيئا! فكرت وتذكرت حول
AMS - حيث يمكنك تثبيت خادمين - سلكيًا ولاسلكيًا وربطهما في نظام واحد - ستتلقى ESP8266 54 دبوسًا رقميًا و 16 دبوسًا تناظريًا ، وسيتلقى ميجا التحكم اللاسلكي عبر Wi-Fi وجميع الكعك ESP8266. منذ وقت طويل لم أواجه مثل هذا المنتدى المثير للاهتمام.
- مرحبا! هل لديك لوحة
ميجا + ESP8266 ؟
- نعم ، ولكن بقي لدينا واحد فقط.
"لماذا واحد فقط؟"
- تم تفكيك الباقي.
"احتفظ بها لي من فضلك."
بضع كلمات عن الشركة
أحببت شيئين RobotDyn شيئين: الأول - مع حلوله التكنولوجية. ليست هناك حاجة للذهاب بعيداً ، والمثال الممتاز هو لوحة Mega + ESP8266 قيد النظر. شيء من هذا القبيل لم أره في متاجرنا (وليس متجرنا ، لكنني لم أبحث عنه حقًا هنا). وهذا ليس المثال الوحيد ، لا يزال هناك خيار Uno + ESP8266 ، ومن الواضح أن الشركة لن تتوقف عند هذا الحد ، على ما يبدو لا يزال هناك العديد من الأجهزة المثيرة للاهتمام في انتظارنا.
والثاني هو سياسة التسعير. لن أسهب في الحديث عن هذه المسألة هنا بالتفصيل ، لكنني سأقول أن الأسعار فاجأتني كثيرًا - شعار الشركة هو "الأسعار مثل أسعار أليكسبريس".
باختصار ، لقد وصفت الخلفية التي ستظهر فيها جميع الأحداث اللاحقة ، والآن ننتقل مباشرة إلى التفاصيل الفنية ووصف اللوحة وكيفية العمل معها.
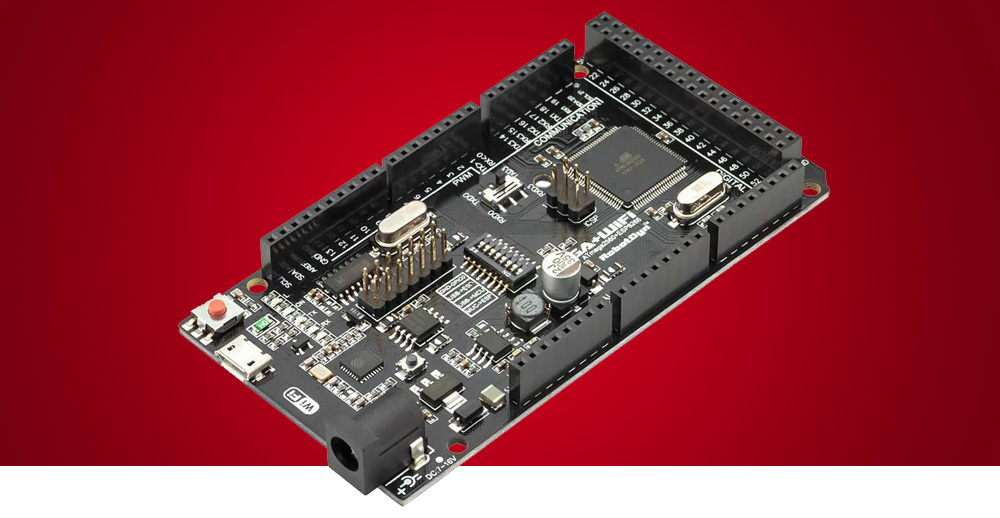
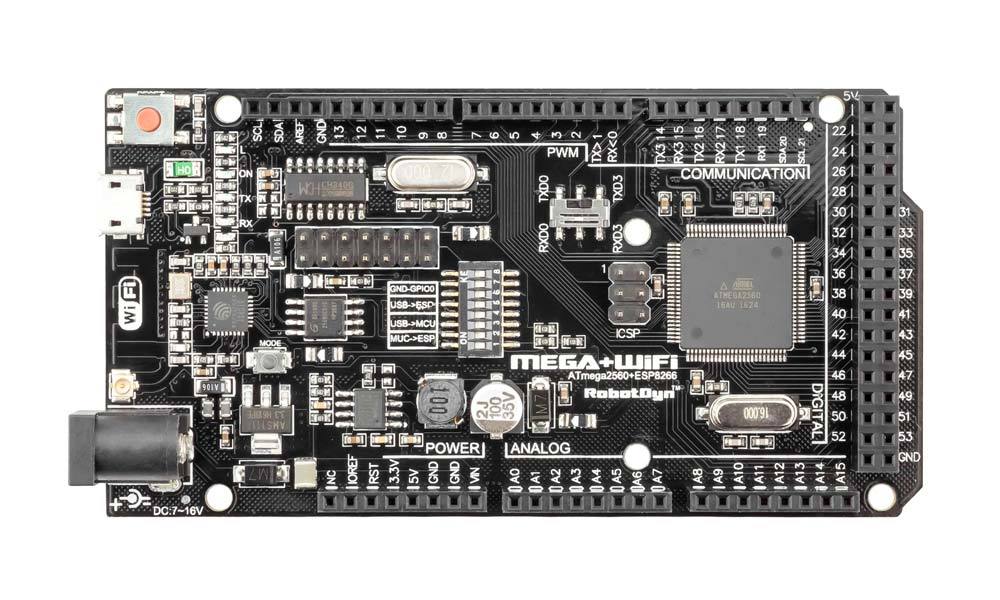
المجلس نفسه
بشكل عام ، لوحة عادية ، لا تختلف كثيرًا عن العديد من الألواح المماثلة ، إن لم يكن لجزء صغير واحد ، وهو شريحة ESP8266EX المدمجة في اللوحة. هذا ينقل المجلس على الفور إلى فئة الحلول الاستثنائية. أريد أن ألفت انتباهك إلى تفاصيل أخرى - لا يدمج اللوحة وحدة قياسية مثل ESP-12 ، ولكن يتم تنفيذ الشريحة وجميع الأسلاك على اللوحة نفسها ، والتي تلمح بشفافية على مستوى المطورين. أود أيضًا أن أشير إلى أن اللوحة تحتوي على هوائي مطبوع وموصل لتوصيل هوائي خارجي ، والذي يمكن أن يكون مفيدًا في كثير من الحالات.
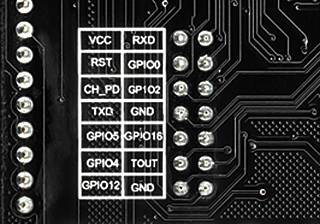
هناك موصلات دبوس على اللوحة للتوصيل بأطراف ESP8266 والعديد من المفاتيح التي تستحق الذكر أكثر من ذلك بقليل. الفكرة الرئيسية لاستخدام اللوحة هي أنه باستخدام المفاتيح ، يمكنك تكوين تفاعل مكوناتها الثلاثة بطرق مختلفة: شريحة Atmega2560 ، رقاقة ESP8266EX ، ومحول CH340G USB-TTL. كل من الاتصالات الفردية والمعقدة ممكنة ، مما يسمح لك بتنظيم العديد من الخيارات للتفاعل بين جميع أجزاء اللوحة. هذا يفتح فرصًا كبيرة لبناء أجهزة مختلفة ، ولكن المزيد حول هذا لاحقًا.
أريد أيضًا أن أشير إلى سعة التحميل اللائقة للوحة. إذا حكمنا من خلال النقوش الموجودة عليه ، فإنه قادر على توفير تيار تحميل 1.6 أمبير على قناة 5 فولت و 1 أمبير على 3.3 فولت. وهو أمر جيد للغاية ، وخاصة في المجموع.
لا يوجد شيء آخر يمكن قوله عن اللوحة ، ننتقل إلى تثبيت البرنامج واختباره.
اختبار المجلس
نظرًا لأن اللوحة مدمجة ولا توجد مساحة خالية عليها عمليًا ، ويتم توصيل الجزء عالي التردد من ESP8266EX ، فقد نشأت في البداية شكوك حول التشغيل الصحيح والخالي من المشاكل لهذا الاقتصاد بأكمله.
بالنظر إلى المستقبل ، سأقول أنه على الرغم من مخاوفي ، فإن كل شيء يعمل بثبات وكما هو متوقع. نقوم بتوصيل المفاتيح الموجودة على لوحة Atmega2560 بـ USB - نحصل على Arduino Mega ، ونقوم بتوصيل ESP8266EX بـ USB - نحصل على ESP8266 ، ننتقل إلى وضع اتصال Atmega2560 مع ESP8266EX نحصل على الاتصال بين الرقائق عبر الواجهة التسلسلية. كل شيء يعمل تمامًا كما هو موضح في التوثيق وكما هو متوقع تمامًا.
تتمثل إحدى المزايا الإضافية لهذا الحل في أن المطورين اهتموا بمطابقة مستويات الإشارة المنطقية لجميع مكونات النظام. أي شخص حاول يدويًا تكوين وحدة ESP8266 وتوصيل جميع مقاومات السحب بشكل صحيح سيفهمني. لا توجد مثل هذه المشاكل ، يتم تخفيض كل عملك إلى النقر على المفاتيح الموجودة على اللوحة وفقًا لتعليمات الشركة المصنعة.
اختبار الحمل
كيف تختبر اللوحة؟ يمكنك تنزيل بعض الرسومات القياسية ، ولكنه سيكون اختبارًا لا شيء. قد يعمل هذا الخيار بشكل جيد ، وفي ظروف القتال سيفشل النظام. لذلك ، تم اختيار عمل كلا الجزأين تحت سيطرة الإصدارات المقابلة من خادم Arduino Mega كاختبار تحميل ثابت. بالنسبة إلى Mega - Arduino Mega Server لـ Mega و ESP8266 - Arduino Mega Server لـ ESP8266 في الإصدار M1.
تم اختيار مجموعة توزيع M1 نظرًا لأنه تم تثبيت 1 ميجا بايت فقط من ذاكرة الفلاش لـ ESP8266 على اللوحة. هذا ، في رأيي ، هو الخطأ الوحيد تقريبًا للمطورين - في المراجعات المستقبلية للوحة ، أود أن أوصي بوضع شرائح ذاكرة 4 ميجابايت. الفرق في السعر صغير ، والإمكانيات عند استخدام الإصدار مع 4 ميجابايت أكبر بكثير. ولكن نظرًا لوجود إصدار AMS للأنظمة التي تحتوي على 1 ميغابايت ، لم أعر اهتمامًا كبيرًا لهذه النقطة واستمر الاختبار.
ماذا تقول؟ نقوم بتشغيل اللوحة ، ونملأ البرنامج ونحصل على خادمين مستقلين. واحد سلكي عبر Ethernet Shield والآخر لاسلكي عبر Wi-Fi. جمال!
أود أيضًا أن أشير إلى أنه حتى إضافة Ethernet Shield مع قارئ بطاقات إلى هذا النظام المتطور بالفعل لم يتسبب في أي تضارب أو فشل - كل شيء سار بالطريقة التي يجب أن يعمل بها. وفي بعض الحالات يكون الأمر أفضل من المعتاد - هذه هي اللوحة الأولى التي نجحت فيها البرامج الثابتة عبر الهواء ESP8266 في 100٪ من الحالات ، في جميع اللوحات والوحدات الأخرى هناك حالات فشل من وقت لآخر مع مثل هذا التفليش.
وهناك خادمان يدوران ، ويحملان اللوحة ، ويؤديا واجباتهما و ... هذا كل شيء كل شيء يعمل فقط ، لا يوجد شيء يمكن قوله حتى ، ولكن ربما يكون هذا هو أفضل مدح لأي نظام تقني.
الأكثر إثارة للاهتمام
ما وصفته هنا مثير للاهتمام من وجهة نظر أكاديمية بحتة: لوحة مثيرة للاهتمام ، حل تقني مثير للاهتمام ، ولكن بالطبع نحن مهتمون بتطبيقه العملي. ما هو تسليط الضوء العملي والتطبيقي؟
والحقيقة هي أنه باستخدام مفتاح واحد على اللوحة ، يمكنك توصيل جزأين (ميجا و ESP) بوحدة واحدة ، وبالتالي ، أولاً ، الحصول على نظام جودة جديد ، وثانيًا ، تعويض العيوب المتأصلة في كل جزء من أجزائه الفردية.
لنبدأ بـ ESP8266. العيب الرئيسي لهذا الحل الممتاز بشكل عام هو النقص الكارثي لدبابيس GPIO. كما يقولون ، واحد ، اثنان ، وحساب خاطئ. من الصعب تحديد رأي مطوري هذه الشريحة ، ولكن قبل إصدار ESP32 كان لديهم المزيد من الوقت للتفكير وقاموا بإصلاح هذا القصور في الشريحة الجديدة. لكننا نتعامل بشكل خاص مع 8266.
تسمح لك هذه اللوحة بإجراء حركة حصان واستخدام القوة الكاملة لـ Mega ، وهذا ، من بين أمور أخرى ، 54 مخرجًا رقميًا و 16 مخرجًا تناظريًا في ESP8266. أي أن جهاز ESP المتدهور لدينا يحصل فجأة على فرص رائعة للعمل مع أجهزة الاستشعار والمشغلات والأجهزة الطرفية الأخرى. اتضح ، إذا جاز التعبير ، طفل ESP على المنشطات.
هذا واحد فقط من الخيارات الممكنة لاستخدام اللوحة ، مستلقية على السطح.
الآن دعونا نلقي نظرة على ميجا. لا تتداخل مع الواجهة اللاسلكية والقدرة على التفاعل مع أجهزة Wi-Fi ، والتي يمكن أن توفر لها التكامل مع جزء ESP من النظام. وفي الوقت نفسه ، لا تزال هناك إمكانية للعمل المتوازي عبر واجهة إيثرنت سلكية.
وهذا أيضًا أحد التطبيقات الممكنة لهذه اللوحة ، مستلقية على السطح.
حسنًا ، خيارات الجسر المختلفة: Ethernet - Wi-Fi ، nRF24 - Ethernet ، nRF24 - Wi-Fi ، nRF24 (1) - nRF24 (2) ، nooLite - Wi-Fi ، nooLite - Ethernet ، nooLite (1) - nooLite (2 ) ، وما إلى ذلك ، وما إلى ذلك إلى ما لا نهاية. يمكنك توجيه الإشارات من العشرات من الأنظمة الفرعية التي يعمل معها خادم Arduino Mega Server بين جزئي اللوحة والواجهات المتصلة بها.
لا أعرف حتى ما أقول. رائع جدا.
التفاصيل الفنية
الآن القليل عن التفاصيل التقنية. ترى جدولاً يتم فيه عرض جميع أوضاع التشغيل الممكنة للوحة ويتم عرض جميع المواضع الممكنة للمفاتيح الموجودة عليه. دعونا ننظر بإيجاز في كل وضع.

اردوينو ميجا 2560
أبسط طريقة لتشغيل اللوحة ، في الجدول ، تم تعيينها كوضع 3. إذا قمت بتعيين المفتاحين 3 و 4 على الوضع ON ، والباقي على الوضع OFF ، نحصل على Arduino Mega 2560 المعتاد. لا شيء مثير للاهتمام ، من أجل ذلك ، لم يكن الأمر يستحق شراء هذه اللوحة ، يمكنك كان لشراء ميجا المعتاد.
ESP8266
كما أنها ليست طريقة تشغيل مثيرة للغاية. في الجدول ، يتم تقسيمه إلى وضعين فرعيين ، تم تعيينهما كـ 1 (تحميل الرسم إلى ESP) و 2 (ESP إلى وضع اتصال USB). هذه هي جميع وظائف ESP8266 القياسية ومن أجل مثل هذا الاستخدام ، لم يكن الأمر يستحق أيضًا شراء هذه اللوحة ، يمكنك الحصول عليها باستخدام وحدة ESP المعتادة.
كلها مستقلة
كما أننا لا نعتبر هذا الخيار في الرقم 6 ، لأنه فيه كل الاتصالات بين أجزاء اللوحة مكسورة ولا يمكن بالتأكيد أن تكون مفيدة لنا لأي شيء.
العلاقة بين ميجا و ESP
في هذا الوضع ، المسمى 5 ، يتم تأسيس الاتصال بين Mega و ESP عبر واجهة تسلسلية ، ولكن لا يوجد اتصال مع محول USB-TTL. يستخدم ESP المسلسل القياسي ، بينما يستخدم Mega Serial3 القياسي الأقل. يعمل الاتصال بثبات وسلاسة بسرعة 115200. هذا وضع تشغيل محدد إلى حد ما عندما لا يوجد جهاز تحكم مزود باتصال USB. ولذا فهو ليس مثيرا للاهتمام بالنسبة لنا.
التواصل بين Mega و ESP و Mega و USB في نفس الوقت
ولكن هذا ما يسمى بطاقة رابحة. نحصل على كل شيء في وقت واحد - اتصال Mega USB والقدرة على تحميل الرسومات إلى Mega والتحكم في تشغيلها عبر نفس USB ، وإمكانية الاتصال بين Mega و ESP والقدرة على تحميل الرسومات إلى ESP8266 والتحكم في تشغيلها في واجهة USB ... Mega! أي الحشو الكامل ، وعدم ترك السجل النقدي مباشرة.
هذا هو وضع التشغيل الصحيح الوحيد المدرج في الجدول. تذكر رقمه الفائز ، وهو أربعة. في تكوين المفاتيح على اللوحة ، يبدو أيضًا جميلًا - 1 ، 2 ، 3 ، 4 في وضع التشغيل ، والباقي في وضع الإيقاف.
سيتساءل القارئ اليقظ: كيف يمكننا تحميل الرسومات إلى ESP8266 إذا كان منفذ USB مشغولًا بالاتصال بالجزء الضخم من النظام؟ وهذا هو السؤال الصحيح ، والإجابة ليست بأي حال. ولماذا ، إذن ، تكتب أنه في هذا التكوين يمكننا تحميل الرسومات إلى ESP8266؟ نظرًا لأن خادم Arduino Mega لديه القدرة على تنزيل الرسومات عبر الهواء مباشرة من Arduino IDE بالضغط على زرين ، فهذا صحيح - لدينا حشو كامل ، كل شيء يعمل على الفور.
ولكن ماذا عن أولئك الذين يريدون استخدام اللوحة بدون خادم Arduino Mega Server؟ هناك خياران فقط: إما النقر باستمرار على المفاتيح ، أو إضافة القدرة على تنزيل الرسومات عبر الهواء في تصميماتك. أنا شخصياً أحب الخيار الثاني أكثر.
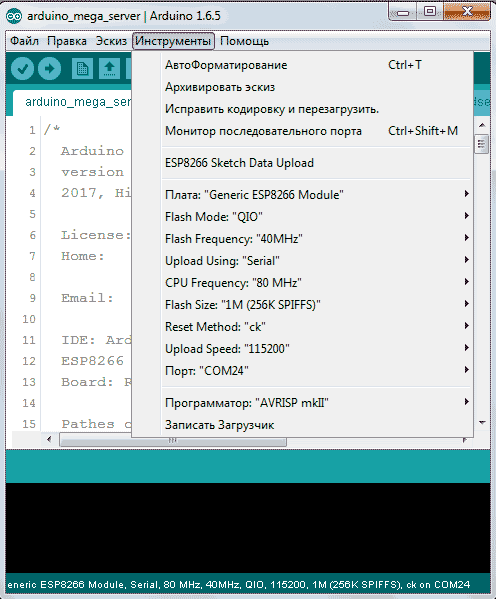
إعدادات Arduino IDE
لا تثير إعدادات Arduino IDE لـ Mega أي أسئلة ، كل شيء قياسي هناك ، وبالنسبة لـ ESP8266 ، سأعطي لقطة شاشة من القائمة مع الإعدادات الخاصة بتنفيذ جزء ESP على لوحة RobotDyn. يجب عليك تعيين نفس المعلمات لنفسك ، باستثناء رقم المنفذ - من المرجح أن يكون له قيمة مختلفة على نظامك.
خادم Arduino Mega لـ RobotDyn Mega + ESP8266
لهذه اللوحة ، تم إصدار إصدار مزدوج خاص من خادم Arduino Mega Server ، والذي يحتوي على خادمين في وقت واحد ، تم تحسينهما خصيصًا لهذه اللوحة. هذا هو الجزء الخارجي من السؤال ، حيث يحتوي كل من هذه الخوادم على وظائف قياسية ويمكن استخدامه لأي من مشاريعك.
يمكنك استخدام كل من هذه الخوادم بشكل مستقل على نفس اللوحة ، أو يمكنك إضافة الوظائف التي تحتاجها واستخدامها في وضع الترادف ووضع الجسر بين شبكتين وأي واجهات متصلة بالخوادم.
يحتوي أول تجميع لخادم Arduino Mega للوحة RobotDyn Mega + ESP8266 على مثال اختباري لتفاعل وحدتي تحكم عبر واجهة تسلسلية. هذا عرض لقدرات التكنولوجيا التي يمكنك على أساسها تطوير الحلول الخاصة بك.
الآن أكثر قليلاً حول تطوير بروتوكول لتفاعل وحدتي تحكم عبر الواجهة التسلسلية بشكل عام وفي هذا المنتدى بشكل خاص.
تطوير البروتوكول
ماذا يجب أن نبني منزل؟ هل تحتاج إلى تطوير بروتوكول للتفاعل بين جزئي النظام عبر الواجهة التسلسلية؟ - سنقوم بتطوير ، هنا الشيء الرئيسي هو تحديد المهمة بشكل واضح وصحيح. لتوضيح التشغيل الترادفي للنظام ، نعرض مؤشرات تشغيل "الشريك" في لوحة القيادة لكل خادم.
قليلا عن المصطلحات. بالنسبة لـ Mega ، "الشريك" هو ESP8266 ، لـ ESP8266 ، على التوالي ، Mega.عندما يعمل الشريك ، سيضيء المؤشر باللون الأخضر ، عندما لا يعمل ، أحمر ورمادي عندما تكون الحالة غير محددة. هذا مريح للغاية - أثناء التشغيل ، سترى على الفور حالة الأنا المتغيرة لنظامك.
من أجل حل عملي لهذه المشكلة ، هناك مليون طريقة بالضبط ، سنختار ما يلي: ستكون كتل الاتصال لكلا الجزئين من النظام متطابقة ، وسيحدث التفاعل في وضع الازدواج الكامل ، وستكون كتل المعلومات بتنسيق بسيط ومفهوم:
?=
أو
?
هذا مجرد مثال اختباري لحل المهمة ، يمكنك تعديل بروتوكول التفاعل هذا أو كتابة بروتوكولك الخاص المناسب لمهامك. ولكن في البروتوكول الذي تم تنفيذه بالفعل ، لا يمكنك فقط مراقبة حالة الشريك ، ولكن أيضًا استخدامه لأغراض عديدة أخرى ، على سبيل المثال ، إرسال حالة دبابيس وحدة التحكم ، أو حالة أجهزة الاستشعار أو إرسال أوامر التحكم إلى الشريك.
على وجه التحديد ، في نظامنا ، ستبدو الفرق على النحو التالي:
؟ mega = 1 - يرسل ميجا بيانات حول أدائه. المعلمة "mega" ، القيمة "1".
؟ esp = 1 - يرسل ESP8266 بيانات حول صحته. المعلمة هي "esp" ، القيمة هي "1".
لذا ، على سبيل المثال ، ضع في اعتبارك تنفيذ بروتوكول الجزء الضخم من النظام.
بالطريقة القياسية ، نقوم بتهيئة وحدة AMS والأجهزة Serial3 Mega بسرعة 115200.
void robotdynInit() { Serial3.begin(115200); modulRobotdyn = MODUL_ENABLE; started("RobotDyn", true); }
نتحقق من حالة المنفذ التسلسلي 3 وفي حالة البيانات من الشريك ، نشكل متغير التسلسل التسلسلي المتغير الذي يحتوي على البيانات أو الأوامر المستلمة.
void checkSerial() { while (Serial3.available() > 0) { if (sFlag) { serialReq = ""; sFlag = false; } char c = Serial3.read(); if (c == 10) { sFlag = true; parseSerialStr(); } else if (c == 13) {
نقوم بتحليل الأوامر والبيانات ، وفي حالة وجود معلومات حول حالة الشريك ، نتخذ تدابير في شكل تغيير حالة متغير esp.
void parseSerialCmd() { String command, parameter; if (serialReq.indexOf(F("?")) >= 0) { int pBegin = serialReq.indexOf(F("?")) + 1; if (serialReq.indexOf(F("=")) >= 0) { int pParam = serialReq.indexOf(F("=")); command = serialReq.substring(pBegin, pParam); parameter = serialReq.substring(pParam + 1); } else { command = serialReq.substring(pBegin); parameter = ""; } if (command != F("esp")) { Serial.print(F("command/parameter: ")); Serial.print(command); Serial.print(F("/")); Serial.println(parameter); } if (command == F("esp")) { if (parameter == F("1")) { esp = 1; espTimer = millis(); } else { esp = 0; } } }
يمكنك بسهولة إضافة معالجة أي أوامر أخرى عن طريق تغيير قسم الرمز المطابق وإضافته.
if (command == F("esp")) { if (parameter == F("1")) { esp = 1; espTimer = millis(); } else { esp = 0; }
إذا كنت تستخدم الكثير من الأوامر والبيانات في المشاريع الخاصة بك والتحليل ، فمن الأفضل تصميم قسم الرمز هذا في شكل وظائف مقابلة.
يبقى فقط النظر في الوظيفة القياسية لوحدة AMS ، المسؤولة عن عملها. أولاً ، يتم التحقق من حالة المنفذ ، ثم يتم إرسال أمر إلى الشريك كل أربع ثوانٍ وهو Mega على قيد الحياة ويعمل ويتم فحص الوقت المنقضي منذ تلقي آخر بيانات من الشريك ، وإذا تجاوزت 8 ثوانٍ ، يتم استنتاج أن الشريك لا يعمل.
void robotdynWork() { checkSerial(); if (cycle4s) { Serial3.println(F("?mega=1")); if (millis() - espTimer > 8000) { esp = 0; } } }
هذا كل شيء سحري. صحيح ، لا شيء معقد؟
كود كامل للوحدة المسؤولة عن الاتصالات بين الأنظمة بين ميجا 2560 و ESP8266 #ifdef ROBOTDYN_FEATURE bool sFlag = true; unsigned long espTimer = millis();
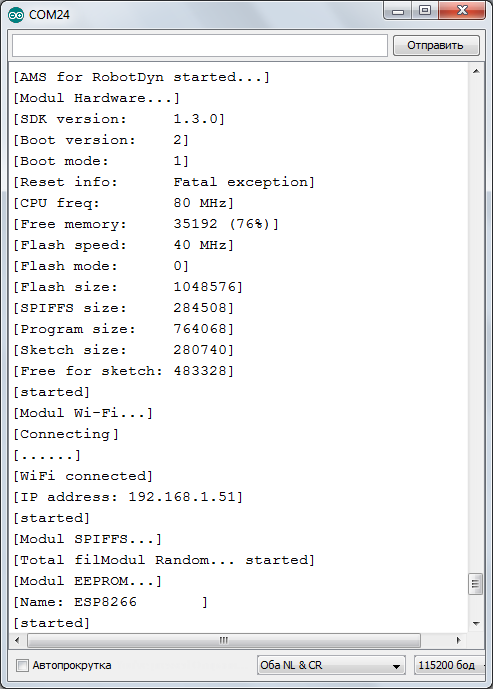
كيف يبدو الإخراج في جهاز العرض التسلسلي
في شاشة Mega 2560 Serial Monitor ، تبدو المخرجات والبيانات والأوامر من جزء ESP من النظام تمامًا مثلها. من أجل تمييز ناتج الشريك عن مخرجات ميجا ، يتم وضع بياناته ضمن علامات اقتباس مربعة. في هذه الحالة ، يمكنك رؤية إعادة تشغيل ESP8266 وسجل التمهيد AMS في جهاز العرض التسلسلي Mega.
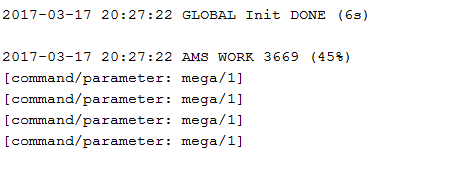
وسجل التبادل الفعلي للأوامر بين جزئي النظام عبر الواجهة التسلسلية. ترى إخراج ESP8266 بمعلومات حول فك تشفير بيانات الحالة الضخمة في الواجهة التسلسلية لـ Mega ، والمحاطة بعلامات اقتباس مربعة.
الجمال في الواجهة
الآن القليل عن كيف يبدو كل شيء في واجهة Arduino Mega Server. للبدء ، سأقدم لقطات شاشة لكلا الجزأين من النظام في العمل.
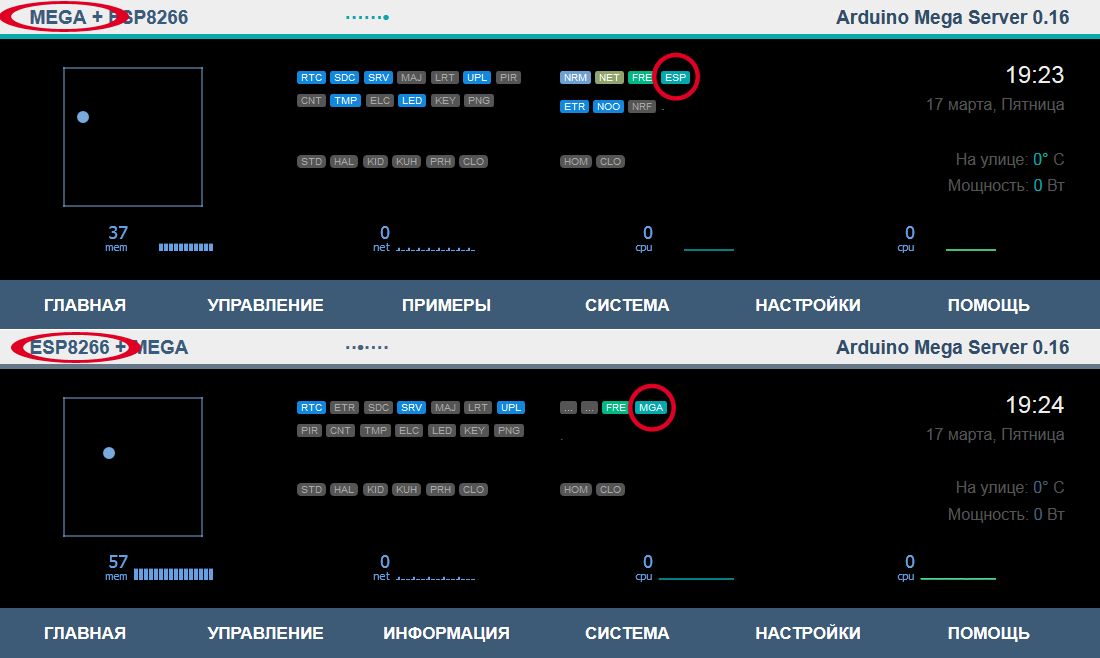
إن علامات الحذف محاطة بدائرة حول نقوش تحدد وحدة التحكم وهذا الجزء من النظام الذي تعمل معه حاليًا. الدوائر محاطة بمؤشرات تظهر حالة الشريك. في الوقت الحالي ، كل شيء في محله ، يعمل كل من أجزاء النظام بشكل طبيعي ويتفاعلان بشكل طبيعي مع بعضهما البعض عبر الواجهة الداخلية. إذا حدث خطأ ما ، فستعرف عنه بعد 8 ثوانٍ كحد أقصى.
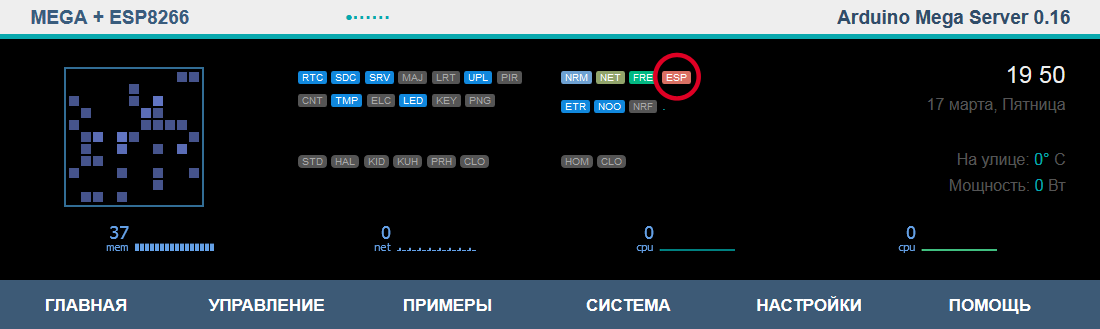
حدث خطأ ما. تلقى ESP8266 تحديثًا للبرامج الثابتة عن طريق الهواء وسجل الجزء الضخم من النظام لحظة إعادة تشغيله. بعد بضع ثوانٍ ، سيستأنف جزء ESP من النظام ويتحول المؤشر إلى اللون الأحمر.
للراحة ، عند التمرير فوق مؤشر حالة الشريك ، يظهر تلميح والقدرة على النقر فوقه وفي نافذة منفصلة ، يتم فتح واجهة الجزء الثاني من النظام ، في هذه الحالة ، جزء ESP. يتم ذلك من أجل الراحة ، يمكنك في أي وقت بنقرة واحدة فتح واجهة الجزء الثاني من النظام.

أفكار المشروع
الآن القليل عن ما يمكنك القيام به من كل هذا ، مع القليل من الخيال. تسمح لك اللوحة المعتادة ، السرية تمامًا للوهلة الأولى ، بالقيام بالكثير من الأشياء غير العادية والمثيرة للاهتمام تمامًا. هذا ينطبق بشكل خاص على الدمج مع خادم Arduino Mega Server.
لذا ، فإن أول ما يتبادر إلى الذهن:
إعادة توجيه البيانات من أجهزة الاستشعار بين وحدات التحكم. من الجانبين وبكميات غير محدودة. هذا هو النظام الذي يتمتع بمزايا كل من أجزائه ، والإمكانيات لا تتراكم فحسب ، ولكن يتم ملاحظة ما يسمى التأثير التآزري.
الجسر بين الواجهات. يمكن أن يعمل Arduino Mega Server مع العديد من الواجهات ويسمح لك هذا النظام بتوجيه البيانات والأوامر بين أي واجهات سلكية ولاسلكية متصلة.
اعمل على نفس الشبكة عندما تتواصل ميجا عبر Ethernet Shield و ESP8266 عبر Wi-Fi مع الأجهزة السلكية واللاسلكية على نفس الشبكة.
اعمل في شبكات مختلفة عندما يكون Mega متصلاً بشبكة إيثرنت سلكية ، و ESP8266 عبر Wi-Fi إلى شبكة أخرى ويقوم النظام بتوجيه الأوامر والبيانات من شبكة إلى أخرى.
إخراج جزء من النظام في واجهة جزء آخر. عبر Ethernet باستخدام قنوات الويب القياسية أو عبر اتصال تسلسلي داخلي.
تصحيح الأخطاء يمكن أن يعمل جزء من النظام كمصحح واختبار لجزء آخر من النظام وفقًا لبرنامجك.
توقيت الوكالة الدولية للطاقة. يمكن لكل وحدة تحكم أن تعمل كنوع من المراقبة فيما يتعلق بآخر.
فشل التسجيل. يمكن لكل وحدة تحكم الاحتفاظ بسجلات عمل شريكها ، وتجميع الإحصاءات وإعداد تقرير عن المواقف المقلقة.
قاعدة بيانات ESP8266. باستخدام هذا النظام ، يمكنك تنظيم شيء مثل قاعدة بيانات SQL على Mega لـ ESP8266. يقوم ESP بعمله ، ويعمل Mega كنظام تخزين (حتى 32 جيجابايت).
وامض بعضها البعض. يمكن أن تقوم أجهزة التحكم بإعادة تحميل بعضها البعض بشكل ديناميكي وفقًا للمنطق المضمن أو عند وصول أمر تحكم خارجي.
ربط الوحدات. يمكن لوحدات التحكم الاتصال بأجهزة طرفية مختلفة تواجه مشكلات في الاتصال بأي جزء من النظام.
وهكذا دواليك ، أعتقد أن القارئ الفضولي سيكون قادرًا على التوصل بشكل مستقل إلى العديد من الطرق التي لا تقل إثارة للاهتمام لاستخدام هذا النظام.
الخلاصة
في رأيي ، هذا حل مثير للاهتمام للغاية ، ويجب أن نقول جزيل الشكر لـ RobotDyn على مثل هذه
الرسوم المثيرة للاهتمام. أنا ، على الأقل ، أقول هذا بإخلاص.
قم بتنزيل مجموعة توزيع Arduino Mega Server لـ RobotDyn Mega + ESP8266 وتحقق شخصيًا من صحة كل ما هو مكتوب هنا ، يمكنك على الموقع الرسمي لمشروع Arduino Mega Server في قسم
التنزيل .