ربما العديد من أولئك الذين اكتشفوا عالم الإلكترونيات ، عاجلاً أم آجلاً يفكرون في إنشاء نوع من الروبوت ، أو مجرد أتمتة منزلية أو نماذج يتم التحكم فيها عن طريق الراديو. ولكن إذا كان كل شيء أكثر أو أقل وضوحًا مع الميكانيكا ، فإن تطوير برنامج للتحكم في مثل هذا الجهاز ، والذي يجب أن يعمل فيه عدد كبير من الماكينات معًا ، تسبب في بعض الصعوبات. سيسمح لك مجمع برامج الأجهزة ServoStudio 12 بالتحكم في هذا الجهاز والتحكم في 12 جهازًا في نفس الوقت وإنشاء تسلسلات الحركة باستخدام المحرر المرئي. أيضًا ، سيصبح هذا المجمع أداة مناسبة لتصحيح أخطاء آليات الجهاز وإنشاء برنامجك الخاص.
إذا لزم الأمر ، يمكن تصدير تسلسل الحركات الذي تم إنشاؤه كرسم Arduino IDE ، للعمل المستقل ، بدون جهاز كمبيوتر. أو ببساطة كمجموعة من قيم النقاط الرئيسية لمزيد من الاستخدام في برنامجك. يحتوي ServoStudio 12 على واجهة بديهية ويمكن حتى للمبتدئين معرفة ذلك. واستخدام لوحة Arduino كجهاز تحكم تنفيذي جعل هذا النظام يمكن الوصول إليه بسهولة في التكرار والتصنيع.
القليل من الخلفية. مستوحاة من فكرة إنشاء جهاز اختبار مؤازر مناسب
من Sergey Grishchenko ، قررت إنشاء نظام خاص بي ، والذي سيكون سهل الاستخدام وفي نفس الوقت مناسبًا وعمليًا. على عكس اختبار المؤازرة أعلاه ، فإن برنامج ServoStudio 12 مسؤول عن كل التحكم على جهاز كمبيوتر شخصي ، ويدعم مجلس Arduino ما يصل إلى 12 جهازًا في المرة الواحدة. الجهاز عبارة عن لوحة Arduino Nano أو Arduino Uno واسعة الانتشار. أيضا ، يحتوي هذا البرنامج على العمل مع اختبار المؤازرة أعلاه.
في البداية ، خططت لإنشاء برنامج صغير يتم فيه إعادة إنتاج تسلسل قيم إشارة التحكم في الماكينات ، ولكن خلال التطوير كان لدي أفكار جديدة ، ونما برنامج بسيط إلى وحدة تحكم كاملة لآليات الروبوت ، مع القدرة على ضبط سرعة الحركات ولعب الحركات باستخدام الساخن مفاتيح.
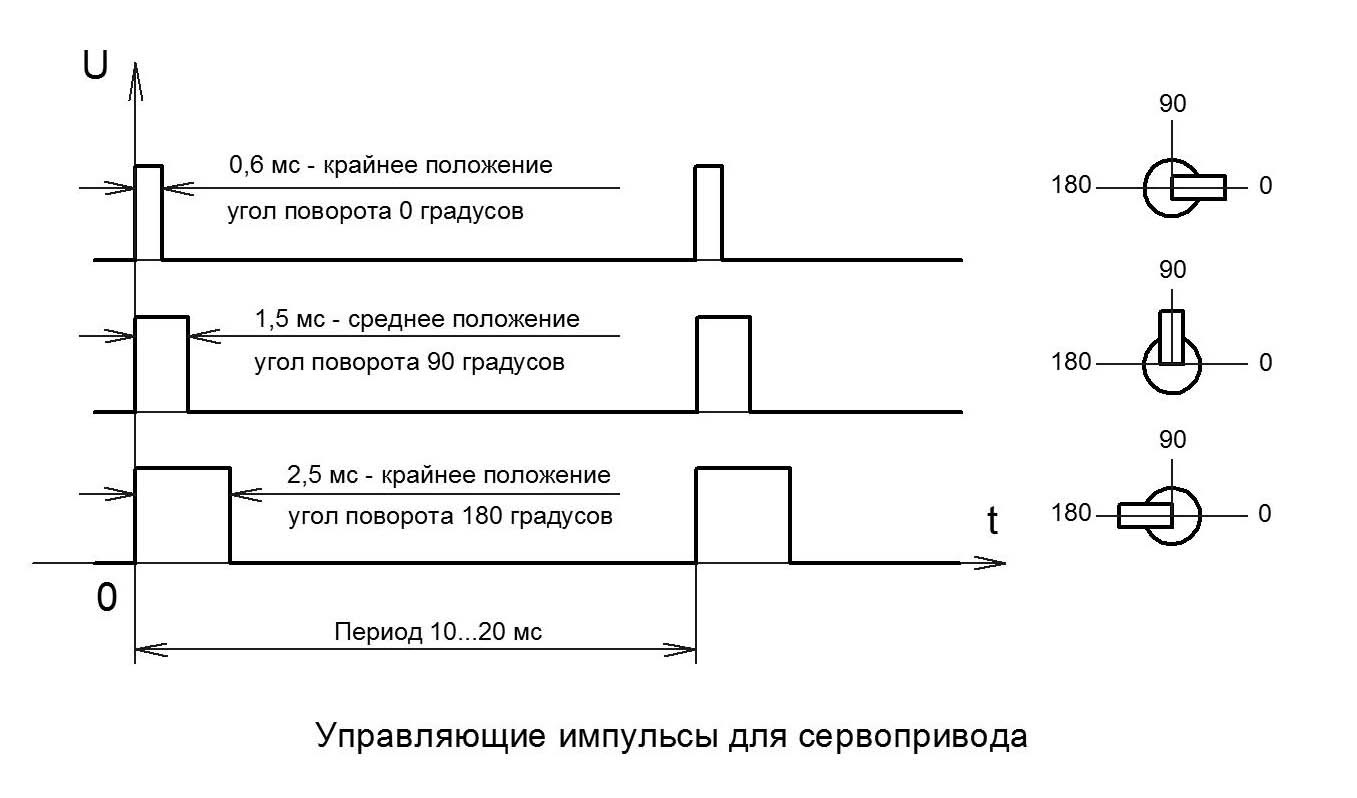
مؤازر - على عكس محرك التجميع ، يسمح لك بإجراء دوران بزاوية معينة. يتم ضبط زاوية الدوران من خلال عرض النبضة لإشارة التحكم. يمكن أن يتراوح عرض هذه النبضات بين 800 - 2300 μs.
 للبدء ، نحتاج إلى ما يلي:
للبدء ، نحتاج إلى ما يلي:مخطط الاتصال بسيط للغاية. ترتبط الدبابيس D2-D13 بمدخلات التحكم في الماكينات. يتم توصيل الطاقة بدبابيس الطاقة اردوينو.
مع استهلاك التيار الكبير بواسطة الماكينات ، من الضروري توصيل مصدر طاقة خارجي.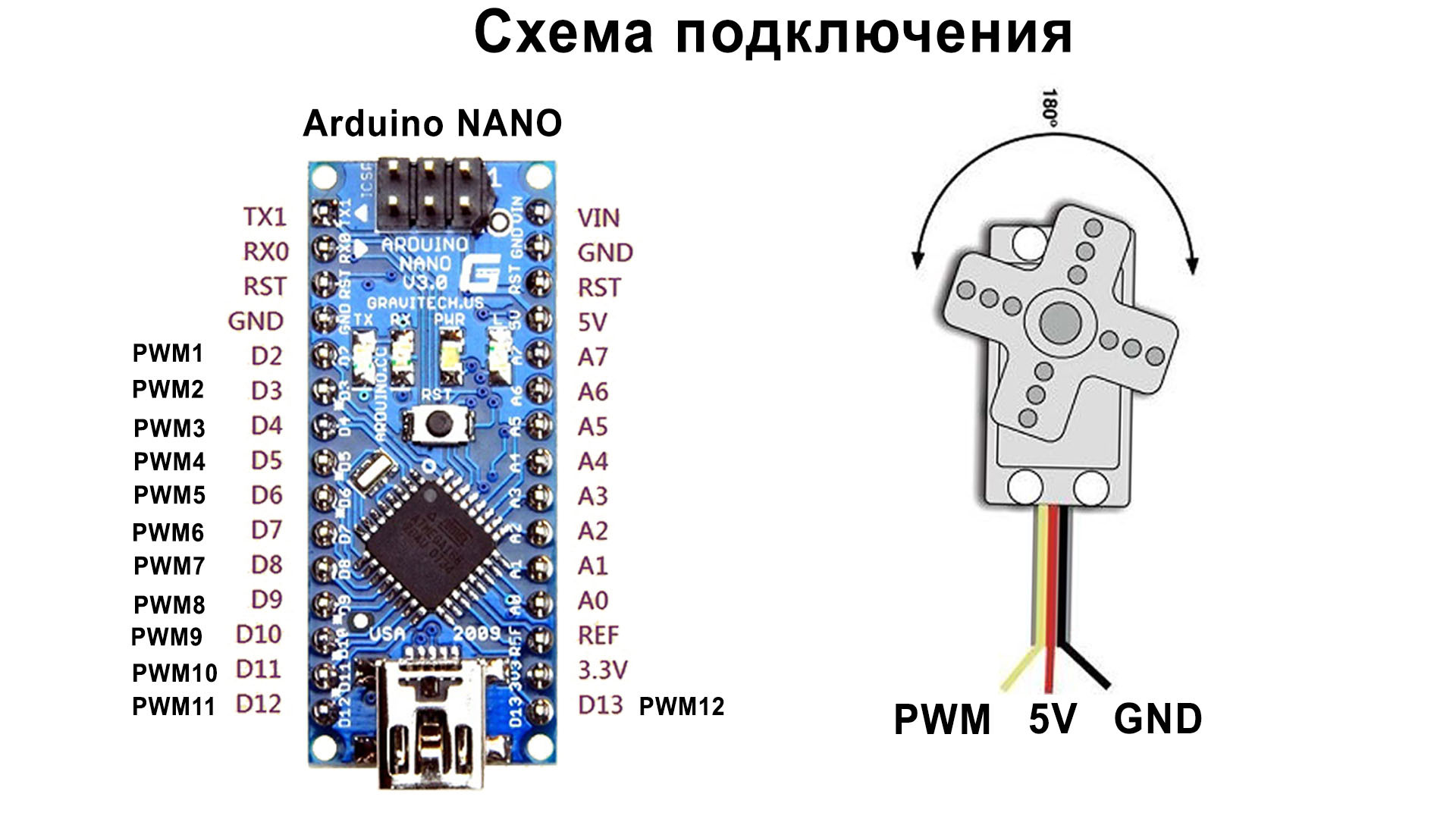
بادئ ذي بدء ، في قائمة برنامج ServoStudio 12 ، تحتاج إلى تحديد عنصر "Code Generator" والعنصر الفرعي "Create a ServoStudio HardWare sketch" ، احفظ هذا الرسم على القرص وافتحه في Arduino IDE واملأه في Arduino Nano / Uno. كل شيء ، الجهاز جاهز! يتم تنفيذ هذا الإجراء مرة واحدة فقط ، مع لوحة Arduino الجديدة.
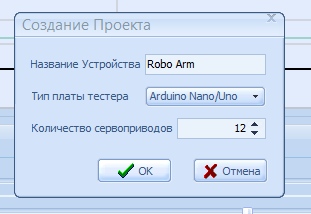
للبدء ، تحتاج إلى إنشاء مشروع جديد (القائمة ملف / جديد). في مربع الحوار ، حدد العدد المطلوب من قنوات PWM (عدد الماكينات) ، حدد نوع لوحة الاختبار واكتب اسم جهازك (للراحة).
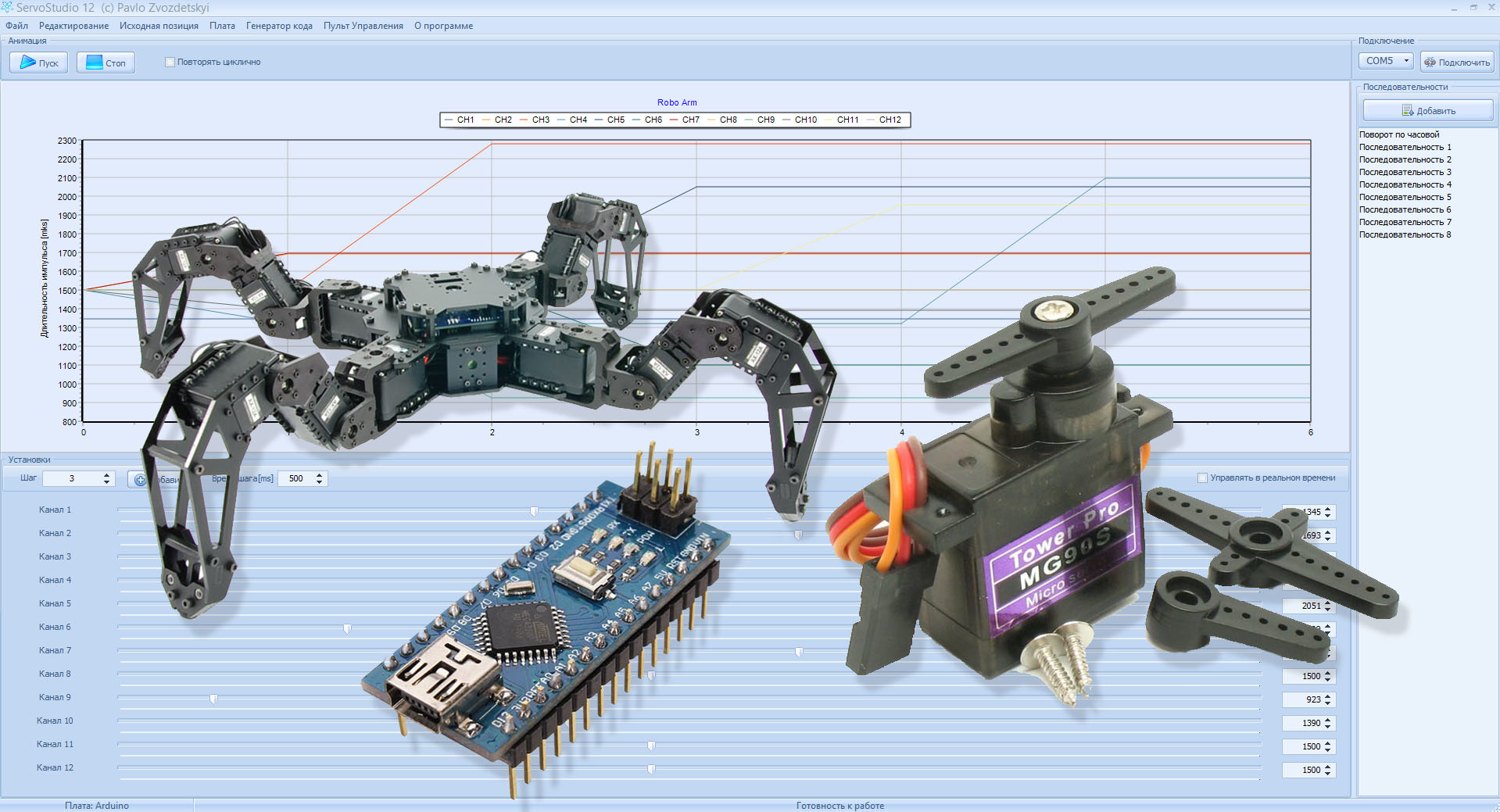
 الآن عن واجهة البرنامج
الآن عن واجهة البرنامج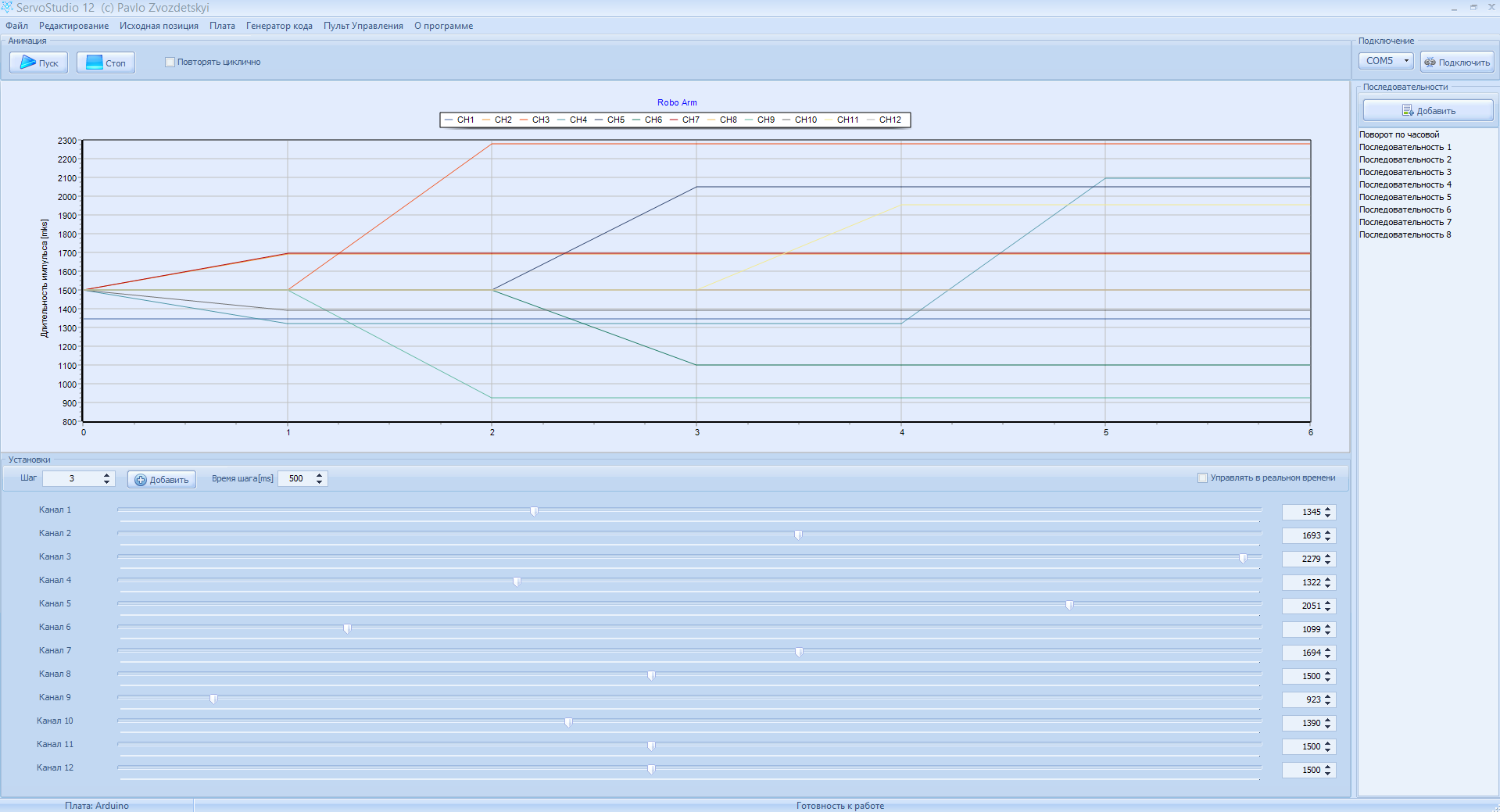
توجد في الأسفل أدوات لإنشاء تسلسل من النقاط الرئيسية. عن طريق تحريك منزلقات وحدات التحكم للقنوات المقابلة ، يتم تعيين قيمة عرض النبضة لإشارة التحكم (زاوية دوران محرك سيرفو) على القناة المقابلة. إذا حددت مربع الاختيار "التحكم في الوقت الفعلي" ، فعندما تحرك منزلق وحدة التحكم ، فإن محرك الأقراص المؤازر المتصل بهذه القناة سوف يتحرك ، وهو أمر مريح للغاية ، حيث يكون موضع محرك الأقراص عند هذه النقطة مرئيًا على الفور. بمجرد تعيين إشارة التحكم على جميع القنوات الضرورية ، تحتاج إلى إنشاء "الإطار" التالي (النقطة الرئيسية التالية) باستخدام الزر "إضافة". وبنفس الطريقة ، بمساعدة المنظمين ، قم بإنشاء نقطة رئيسية جديدة ، وبقدر ما هو ضروري. يتم تعيين الوقت الذي يجب أن تدور فيه الماكينة بزاوية معينة بشكل منفصل لكل إطار ، في حقل "وقت الخطوة" ، يتم تعيين الوقت بالمللي ثانية. كلما كانت القيمة أكبر ، كلما كانت الحركة أبطأ ، كلما كانت أصغر كلما كانت أسرع. يعرض حقل الخطوة الإطار الحالي للتسلسل. إذا لزم الأمر ، قم بتغيير رقم الخطوة في هذا الحقل ، يمكنك تعديل الخطوات السابقة. من أجل الراحة ، يمكن تغيير أسماء القنوات بالنقر المزدوج على اسم القناة على يسار المقبض.
في الجزء العلوي ، على الرسم البياني ، يتم عرض التغيير في عرض إشارة التحكم في الماكينات بشكل مرئي.
وعندما يتم إنشاء نوع من الحركة النهائية (على سبيل المثال ، خطوة إلى الأمام) ، يمكنك حفظ التسلسل الحالي كتسلسل نهائي منفصل عن طريق النقر فوق الزر "إضافة" في لوحة "التسلسلات" ، على الجانب الأيمن من نافذة البرنامج. على سبيل المثال ، يمكنك إنشاء عدة تسلسلات للمضي قدمًا ، للخلف ، لليسار ، لليمين ، إلخ. ويمكن تشغيل هذه التسلسلات بشكل مستقل عن بعضها البعض ، عن طريق النقر المزدوج فوق الماوس ، أو من قائمة السياق ، وكذلك من نافذة "التحكم عن بعد" (ولكن المزيد عن ذلك لاحقًا). وبالتالي ، بإعادة إنتاج هذه التسلسلات ، يتم التحكم في الجهاز (الروبوت). يمكنك أيضًا إضافة تسلسلات محفوظة إلى التسلسل الرئيسي ، وإنشاء تسلسل واحد كبير من الإجراءات. يمكن أن يكون هذا مفيدًا جدًا لإثبات تشغيل الجهاز.
أيضًا ، يمكن تصدير التسلسل الرئيسي (المفتوح حاليًا في المحرر) كرسم تخطيطي لـ Arduino IDE ، للتشغيل دون اتصال بواسطة لوحة Arduino ، بدون جهاز كمبيوتر. للقيام بذلك ، حدد عنصر "تسلسل التصدير" في قائمة "Code Generator" وانقر فوق الزر "إنشاء" في مربع الحوار ، وبعد ذلك يمكن نسخ هذا الرسم التخطيطي إلى الحافظة أو حفظه كرسم تخطيطي لـ Arduino IDE. علاوة على ذلك ، يمكن ملء هذا الرسم بالطريقة المعتادة في وحدة تحكم لوحة Arduino.
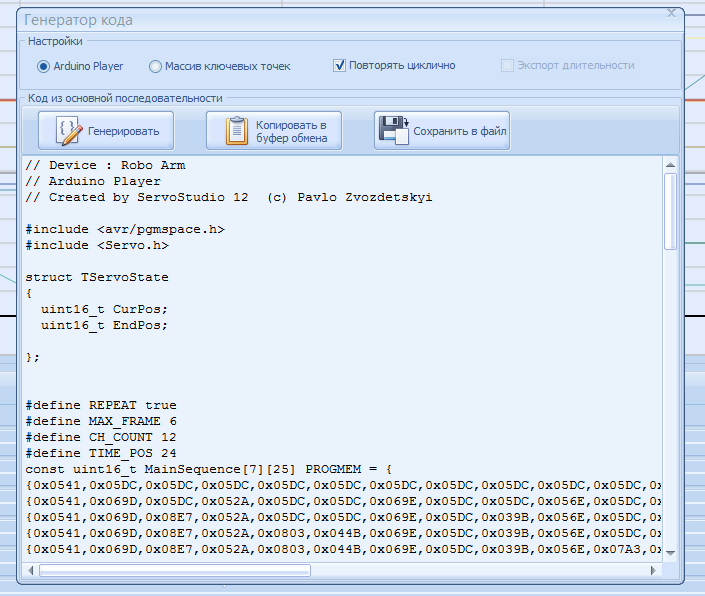
من الممكن تشغيل هذا التسلسل بشكل دوري أو مرة واحدة فقط ، عن طريق ضبط أو إلغاء تحديد مربع "تكرار في دورات". من الممكن أيضًا تصدير النقاط الرئيسية إلى مصفوفة ، وهذا يمكن أن يكون مفيدًا إذا كان لديك بالفعل برنامج خاص بك للمتحكم الدقيق وتحتاج إلى تعيين حركات فيه ، واختيارياً يمكنك إضافة قيم وقت إعداد الموضع إلى الصفيف عن طريق تعيين العلامة المقابلة. إذا ، بعد وميض هذا الرسم ، يجب استخدام لوحة Arduino مرة أخرى مع برنامج ServoStudio 12 ، ثم حدد عنصر "Code Generator" مرة أخرى والعنصر الفرعي "Create ServoStudio HardWare Sketch" في القائمة ، واحفظ هذا الرسم على القرص وافتحه في Arduino IDE وقم بتحميله إلى Arduino نانو / أونو.
نافذة "لوحة التحكم"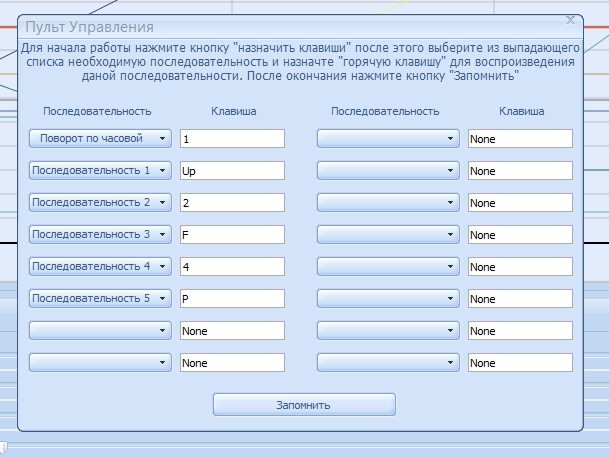
يتيح لك استخدام مفاتيح التشغيل السريع لتشغيل تسلسلات فردية. تحتاج أولاً إلى النقر فوق الزر "تعيين المفاتيح" ، وتحديد التسلسل المطلوب من القائمة المنسدلة وتعيين مفتاح تشغيل سريع له. عند تثبيت كل شيء ، يجب النقر فوق الزر "تذكر". الآن ، أثناء فتح هذه النافذة ، سيؤدي الضغط على مفتاح التشغيل السريع إلى تشغيل التسلسل المعين لها.
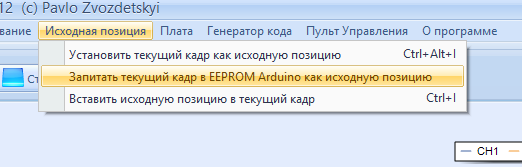
ليس عنصر غير مهم هو عنصر القائمة "موضع البداية" - هذا هو وضع الماكينة عند تشغيله ، أو ببساطة "الوضع العادي" لزاوية دوران الماكينات. بعبارة أخرى ، إذا كنت لا تريد أن ينحرف الروبوت الخاص بك عند تشغيله ، استخدم المنظمين لتحديد الموضع الأمثل له وحدد عنصر القائمة "تسجيل الإطار الحالي في Arduino EEPROM كموضع انطلاق" ، هذه الوظيفة متاحة فقط لألواح Arduino. هناك أيضًا نقاط "كتابة الإطار الحالي كموضع البداية" و "إدراج موضع البداية في الإطار الحالي" ، سيكون مفيدًا جدًا إذا كنت بحاجة إلى بدء تسلسل جديد ونقطة البداية. يتم حفظ الموضع الأولي في ملف المشروع ويكون متاحًا عند فتح الملف ، لذلك لن تحتاج إلى إعادة تحديده.
يتمتع البرنامج أيضًا بالقدرة على ربط ملفات المشروع بـ ServoStudio 12. للقيام بذلك ، تحتاج إلى تشغيله مرة واحدة مع حقوق المسؤول. ServoStudio 12 محمولة تمامًا ، وتتكون من ملف واحد (عند إغلاق البرنامج ، لا يزال يتم إنشاء ملف آخر مشروع مفتوح) ولا يتطلب التثبيت.
يمكن رؤية المزيد من التفاصيل حول العمل في الفيديو.
ServoStudio 12 رابط تنزيل البرنامجالقليل عن خطط المستقبل:
- أريد إنشاء تطبيق Android يمكنه فتح ملف المشروع واستخدام الهاتف للتحكم في الروبوت. إدارة عبر BlueTooth أو WiFi عبر محول TCP-UART.
- أرغب أيضًا في إنشاء إصدار لعدد أكبر من القنوات لإدارة الأجهزة الأكثر تعقيدًا.
- أضف معالجة الإشارة من أجهزة الاستشعار المتصلة (على سبيل المثال ، إذا كانت هناك عقبة أمامك ، فانتقل حولها).
- أضف القدرة على التحكم في المخرجات الرقمية (على سبيل المثال ، لتشغيل مصابيح LED أو أي شيء آخر)
ولكن ما إذا كانت هذه الخطط ستبقى خططًا فقط أو سيتم إصدارها في الإصدار التالي من البرنامج يعتمد على الاهتمام بهذا المجمع.