تعرف على "المطرقة" - وهي وحدة استراتيجية من لعبة "قواعد الحرب".

تم إنشاء النموذج ثلاثي الأبعاد للروبوت قبل 5 سنوات. يحتوي على 180 ألف مضلع و 440 عنصر و 5 أوراق نسيج أساسية بدقة 4K لكل منها. ولكن الآن قبل أن تكون لم تعد نموذجًا ثلاثي الأبعاد ، بل عملاقًا حقيقيًا يبلغ عمقه 3 أمتار من 800 كجم من اللحم والدم. بتعبير أدق ، من المعدن والمعدن.
"المطارق" من صنع ساشا وأندري وسيرجي - الحدادون من ذوي الخبرة. يقولون أن تشكيلهم أصبح نوعًا من الاستوديو الفني. ننشر قصة الرجال حول كيفية ولادة الروبوت "هامر".
كيفية البدء في إنشاء روبوت
نحن نعمل بشكل أساسي على الطلبات الحصرية - نحن نهتم بما نحن مهتمون به ونرفع باستمرار مستوى التعقيد.
نجد شيئا لم يفعله أي شخص آخر. ثم نكتشف ماهية المشكلة الرئيسية ونبدأ العمل. ابتكر سيرجي الدروع القوطية الأكثر تعقيدًا. وبالنسبة ليورو 2012 في أحد شوارع خاركوف ، قمنا بتثبيت تمثال 4 أمتار لامرأة. بمجرد أن صنعنا شخصية حصان ، نصفها مزور بطريقة واقعية ، والنصف الآخر بأسلوب steampunk. في معظم الأحيان ، يتبين أنه يمكن التغلب على الصعوبات التي تراجع عنها الآخرون من قبل - ستكون هناك رغبة.
بدأنا التعاون مع Plarium في مهمة تجريبية صغيرة - مجموعات الإسعافات الأولية من Half-Life. وهي الآن معلقة في
ساحة انتظار السيارات في بلاريوم خاركيف . ثم أرسل الرجال نموذجًا ثلاثي الأبعاد ولقطات شاشة وفيديو مع روبوت.
لم تكن لدينا الخبرة اللازمة ، لكننا كنا نعلم أننا سنحصل عليها في هذه العملية. في المجمل ، عملنا في Hammer لمدة عامين ، لكننا الآن كنا سنقوم بمشروع مماثل في 6 أشهر.
كيف قمنا بتحضير المواد
أولاً ، استخدمنا النهج القديم - قمنا بطباعة الصور ، ونقل الأحجام إلى أوراق الورق وبدأنا في قطع المعدن بالمطحنة. استغرق الأمر عدة أسابيع لإنشاء قدم واحدة والعديد من المواد أكثر مما توقعنا. كان من الضروري البحث عن بدائل.
تذكرنا أن هناك برامج تتحلل النماذج في مسح ضوئي ، ثم يتم إنشاء ورق الحرف. قررنا أن نجرب نفس الشيء مع المعدن.
في 3ds Max ، تم تفكيك الروبوت إلى أجزاء ، وفي Pepacura ، اكتشفوا نموذجًا ثلاثي الأبعاد. ثم بدأوا في إعداد المواد للقطع بالليزر وإتقان SolidWorks. لإنشاء العدد المطلوب من الأجزاء ، كان من الضروري إجراء قطع 1.5 كيلومتر على 26 ورقة من الصلب المليمتر بقياس 1 × 2 متر.

الشركة ، التي تتعامل مع القطع بالليزر وعادة ما تصنع حالات لآلات اللحام ، فوجئت للغاية بطلبنا. خاصة عدد الأجزاء - أكثر من 3000.
وسرعان ما تم تسليم عناصر القطع إلى ورشة العمل. في هذه اللحظة ، أدركنا حقًا حجم العمل: التفاصيل مكدسة في أكوام ، فمن المستحيل أن تذهب من خلال ورشة العمل. تم إنفاق أسبوع واحد فقط على الفرز والتوسيم ، وكان من المخيف تخيل كم من الوقت سيستغرق تجميعه.


كيف قمنا بتجميع الروبوت
قمنا بتقسيم أعمال التجميع إلى كتل: تم تجميع كل جزء من الروبوت بشكل منفصل. في نفس الوقت ، يمكن أن يتكون جزء واحد من 20-30 جزءًا مترابطًا معًا.
تم تصميم العنصر الأساسي ، الذي يرتكز عليه كل شيء ، في 3ds Max ، ثم تم تجميعه من الأنابيب. كان يجب أن يكون التصميم قابلاً للطي ، لذلك اشترينا أنابيب قوية للإطار ، وتم تركيب بقية الكتل.
تم قطع حدود الأجزاء فقط بالليزر ، بحيث يجب إنشاء جميع الانحناءات والحجم يدويًا. قمنا بنقل الخطوط المتقطعة للانحناءات من Peparura إلى الأجزاء الحديدية ، ثم مررنا بهذه العلامات مع مطحنة لجعل المعدن أكثر مرونة. كان الترميز عملية تستغرق وقتًا طويلاً ، فقد استغرقت ثلث الوقت.
في مرحلة التجميع ، قمنا بحرق جهازي كمبيوتر محمول وهاتفين. لم تستطع المعدات التعامل مع وفرة الغبار المعدني في الهواء ، وكان من المستحيل العمل بدون تصور.
جمعنا بشكل منفصل منصة الروبوت وأرجلها وجسدها وذراعيها وبندقيتها. يتم تفكيك كل عنصر من هذه العناصر أيضًا - على سبيل المثال ، يمكنك فصل الرأس عن الجسم ، وتفكيك اليدين في عدة أجزاء. هذا يسمح لك بالوصول إلى الإلكترونيات في أي وحدة إذا لزم الأمر.






لكل كتلة ، حددنا جزء الإطار ، وقبل كل شيء ، قمنا بثنيه ، ثم قمنا بإرفاق أجزاء أخرى ساعدت في تحديد الشكل. تم تجميع جميع الكتل أولاً على قطعة لحام ، ثم غليها بالكامل ، وإرسالها للتجريد ووضعها جانبًا.
بدأنا من رأس الروبوت وأدركنا على الفور أننا نقوم بكل شيء بشكل صحيح: يبدو الرأس تمامًا مثل نموذج ثلاثي الأبعاد.

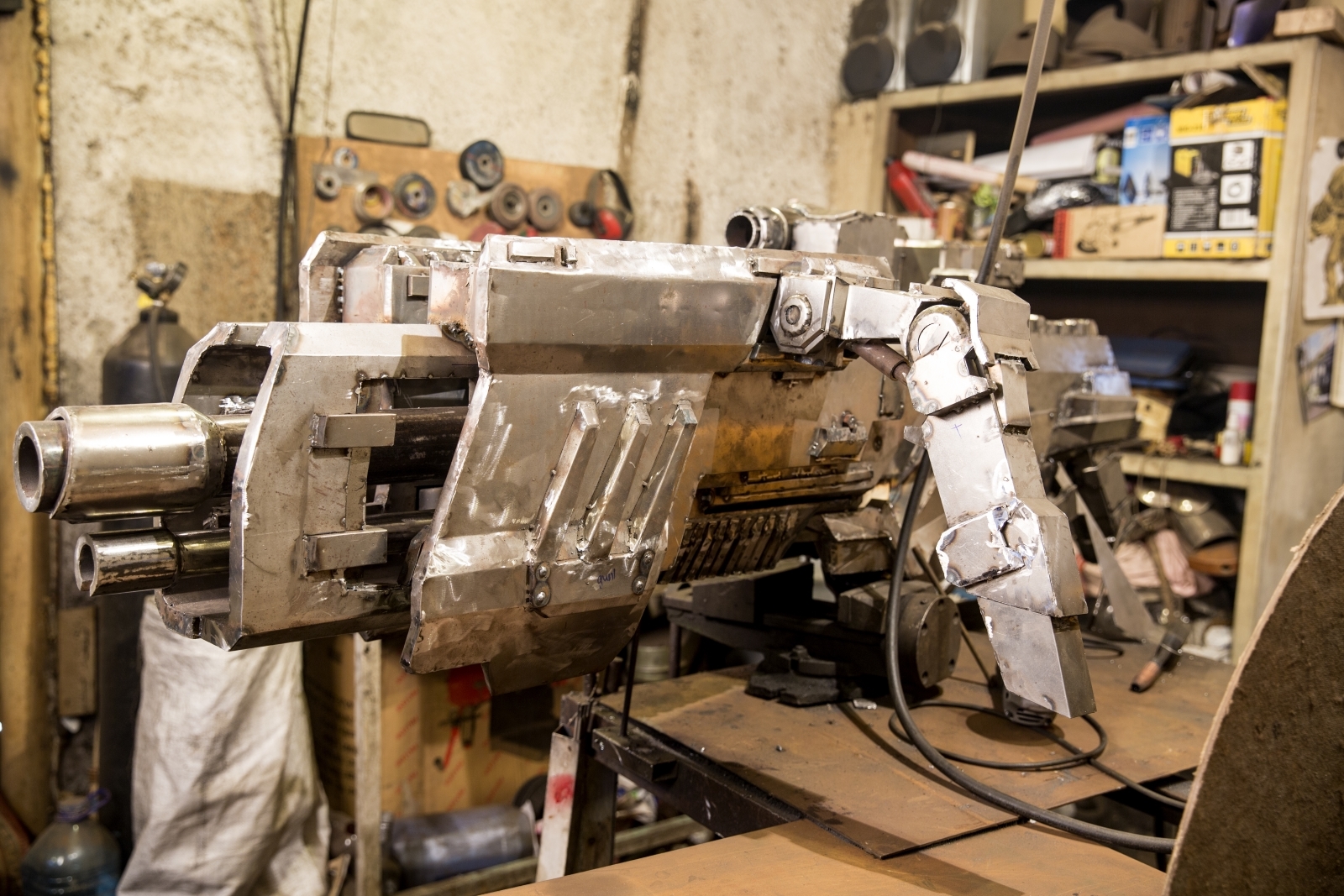
بعد الرأس وإطار الساقين ، صنعوا مدفعًا وبدأوا في إنشاء هيكل قابل للطي للجسم. عندما تم الانتهاء من الجسد والذراعين ، أخذ الكهربائيون العناصر المتحركة والمضيئة في الخوذة ، على المرفقين والكتفين.
فجأة ، ظهرت صعوبات مع البندقية. أمسكه روبوت افتراضي دون صعوبة ، لكن النسب الحقيقية لم يُسمح لها بحمل السلاح. لذلك ، قدمنا دعمًا إضافيًا وقمنا بتنكره كجهاز لوحي.



كيف أحيينا الروبوت
يمكن للروبوت أن يدير رأسه. لا يمكن للمحرك العادي أن يتعامل مع مثل هذا الوزن ، لذلك استخدمنا واحدة من أقوى الماكينات للروبوتات ، المصممة بجهد 35 كيلوغرامًا.
بالطبع ، يمكنك أن تأخذ متحكمًا بسيطًا وخياطته فيه برنامجًا عاديًا يدير رأسه إلى اليسار واليمين. لكنني أردت المزيد من الواقعية في الحركات ، لذلك قمنا بتطبيق آلية الدوران باستخدام Arduino. يتضمن البرنامج خوارزمية غير خطية وإعدادات مختلفة ، وكذلك القدرة على التحكم في حركة الرأس ولون إضاءة العينين واليدين والنطاق من الهاتف الذكي.
تم تجهيز الروبوت بصوتيات غامضة مقاومة للماء (يتم استخدام نفس الشيء على القوارب واليخوت) ومكبر للصوت مع نظام كاريوكي - يمكن توصيل ميكروفونين أو غيتار كهربائي بمطرقة.
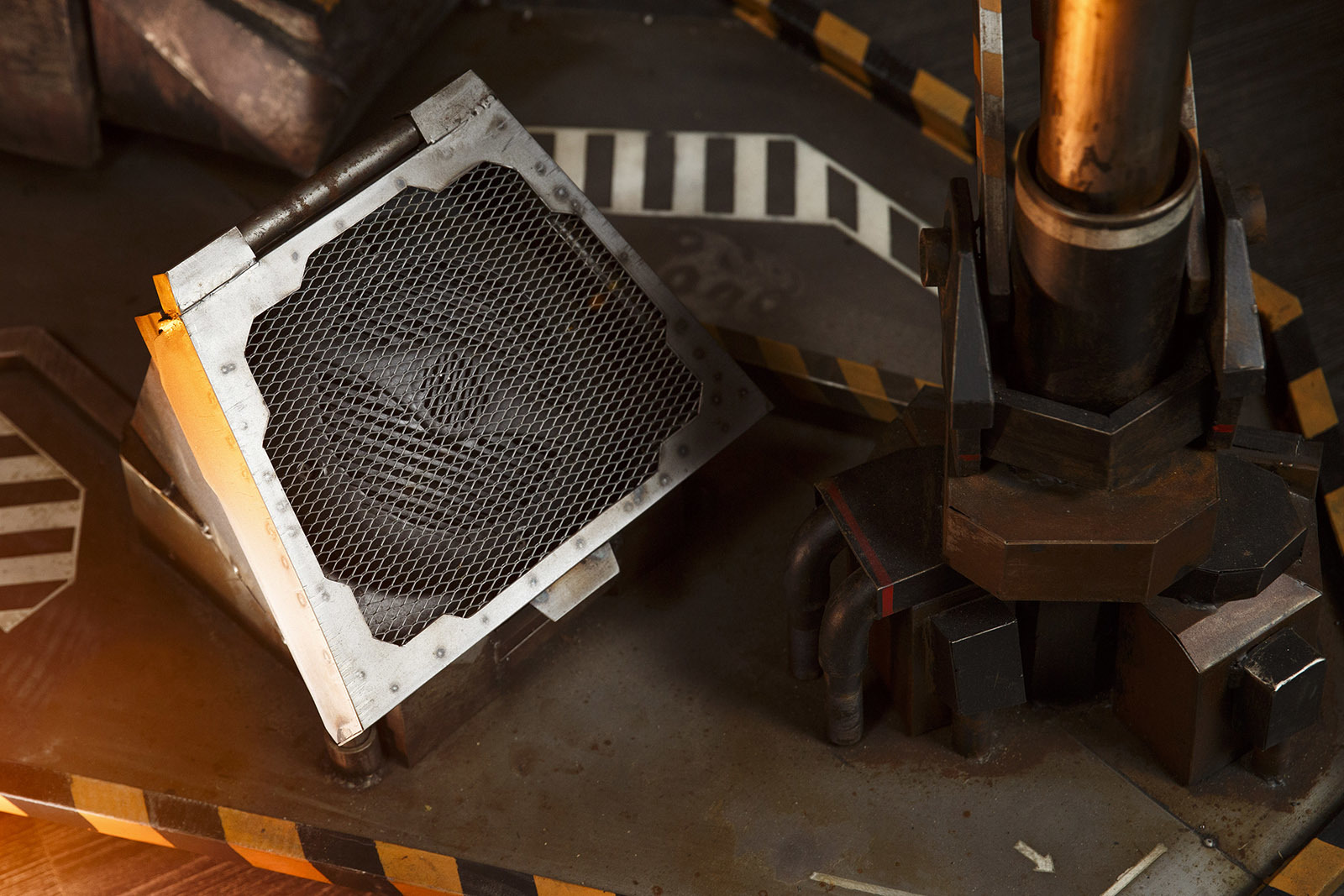
تم ملء النطاق والمرفقين بالغراء الساخن ، الذي يبدد الضوء ويخفي مصدره. في السابق ، جربنا بالفعل إضاءة مجموعة Half-Life للإسعافات الأولية واكتشفنا أن المادة مثالية لهذه الأغراض.
يمر شريط LED على طول كفاف الوحدات. في السينما ، رأينا أن الروبوت يستخدم الإضاءة الخلفية على أكتافه لعمى العدو ، لذلك تركنا فجوة يمر عبرها شعاع من الضوء.

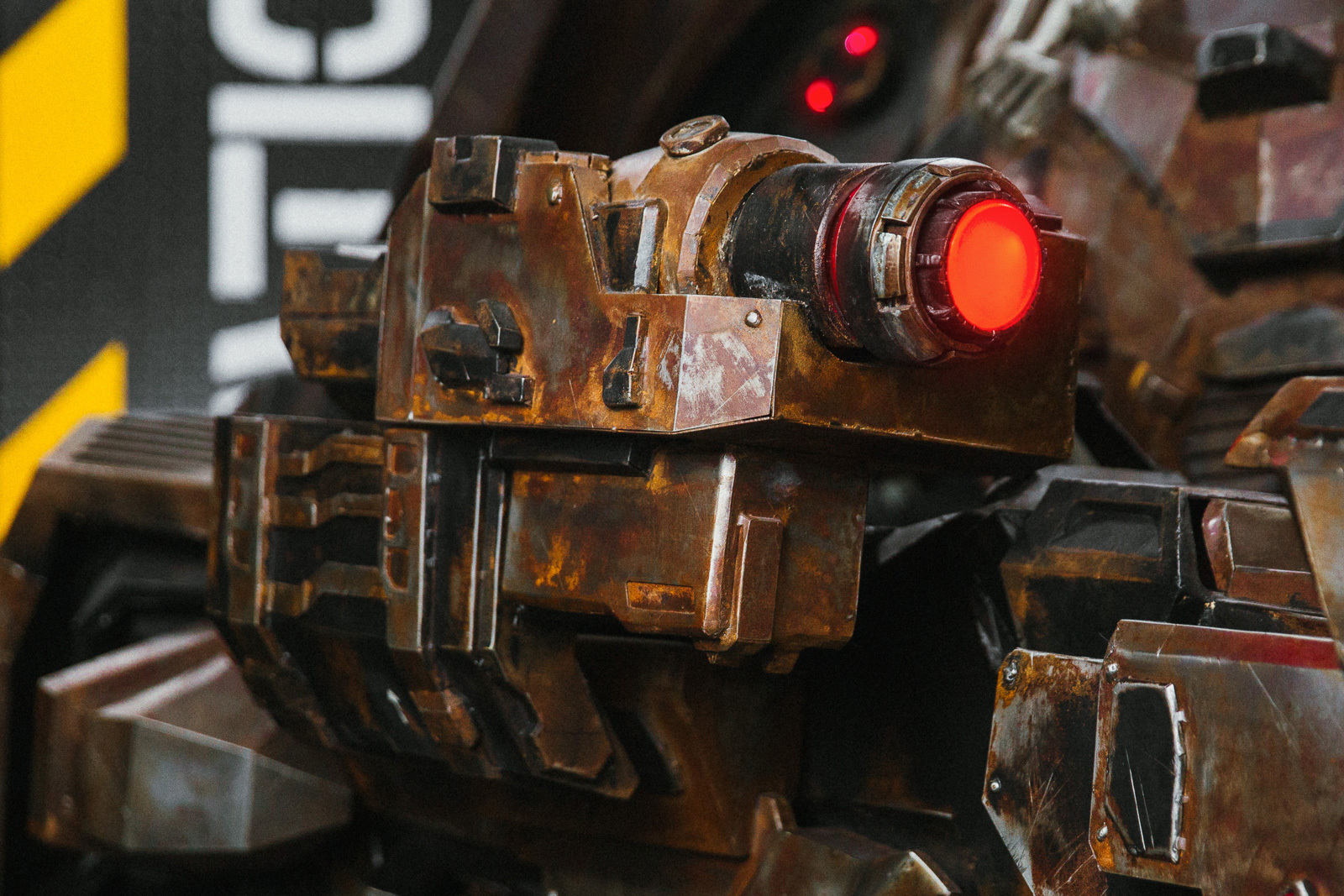
وفي عيون Hammer ، شريط LED مغطى بفلتر Plexiglas ، ومسح بالقرب من الحواف. هذا ما يخلق تأثير التلاميذ المضيئين.

كيف تم جلب الجمال
أسهل طريقة هي تنظيف الروبوت وفتحه بالتربة والطلاء. لكننا أردنا أن يبدو الروبوت وكأنه خرج من خضم المعركة. لهذا ، كان من الضروري أن لا يتآكل الصدأ المعدني والصدأ. لذلك ، قضينا كمية كبيرة من ورق الصنفرة والفرش والفوهات لإجراء الحفر ، وتنظيف كل سنتيمتر من المعدن يدويًا.







استغرقت المرحلة الأخيرة ، التجميع ، ثلاثة أيام - بدون نوم وراحة. كان هذا هو الجزء الأصعب من المشروع. ما يلزم لإدخال مسدس يزن أكثر من 200 كيلوجرام في يديه!

يلتقي روبوت Hammer الآن مع موظفي Plarium Kharkiv والزوار في مكتب استقبال الطابق الثامن.
 PS لاحقًا ، قام المطورون والمحليون ومصممو الصوت في Plarium بتدريس الروبوت للتحدث بثلاث لغات ، ولكن هذا سيكون مقالة منفصلة.
PS لاحقًا ، قام المطورون والمحليون ومصممو الصوت في Plarium بتدريس الروبوت للتحدث بثلاث لغات ، ولكن هذا سيكون مقالة منفصلة.