عادة ما يتم التحكم في الأطراف الاصطناعية من الجيل الماضي بمساعدة إشارات عضلية كهربائية ، والتي تنشأ نتيجة تقلصات العضلات في اليد البشرية. إن إدارة مثل هذا الطرف الاصطناعي ليست سهلة: فهي تتطلب تركيزًا معينًا ، وتترك فعالية الإجراءات الناجحة الكثير مما هو مرغوب فيه. ليس من السهل أن تفعل ما تريد في المرة الأولى. من حيث دقة الأفعال ، فإن هذه الأطراف الاصطناعية بعيدة كل البعد عن الإجراءات "البديهية" لليد الحقيقية الحية.
في السنوات الأخيرة ، ركز الباحثون بشكل رئيسي على دقة التعرف على الإشارات الكهربائية العضلية ، وبلغت دقة التعرف على حركات الأصابع الفردية 90 ٪. ولكن لعدد من الأسباب الفنية ، فإن الاستخدام المكثف لمثل هذه الأطراف الاصطناعية "الذكية" محدود للغاية.
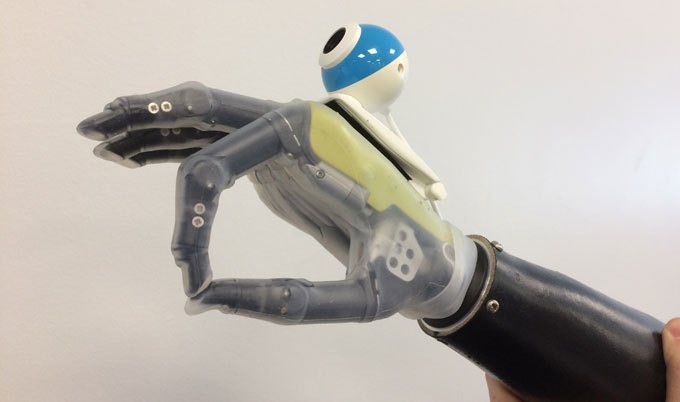
يقدم تطور جديد للمهندسين من جامعة نيوكاسل (المملكة المتحدة) نهجًا مختلفًا تمامًا. تتعرف يد مزودة بكاميرا فيديو على شيء أمامها - وتحدد أفضل طريقة لالتقاطها. إنه يعمل تلقائيًا وعلى الفور تقريبًا ، دون جهد إضافي من جانب الرجل. في الواقع ، تتمتع اليد الإلكترونية برؤيتها الخاصة.
في السابق ، جرب العلماء كاميرات استريو وخوارزميات التعرف على الكائنات المختلفة. في موازاة ذلك ، تم إنشاء نماذج جديدة من المتلاعبين للروبوتات - هناك ، تتشابه تقنيات رؤية الكمبيوتر إلى حد كبير مع الأطراف الاصطناعية للناس. في مجال الروبوتات تم اختبار أكثر التقنيات الواعدة للرؤية الآلية والتعلم العميق.
استخدم المهندسون من جامعة نيوكاسل هذه التطورات التي قام بها أسلافهم واستهدفوا نظام رؤية الماكينة للتعرف على
نوع الالتقاط لأشياء من أنواع مختلفة ، وليس بناءً على قياس محدد لحجمها. أي أن الأشياء بعد تدريب الشبكة العصبية يتم تصنيفها بدقة حسب نوع الالتقاط ، وليس حسب نوع أو فئة الكائن. يعتقد المؤلفون أنه بسبب هذا النهج الجديد بشكل أساسي ، تمكنوا من تحسين سرعة النظام بشكل كبير ، لأنه يتجاهل التفاصيل غير الضرورية.
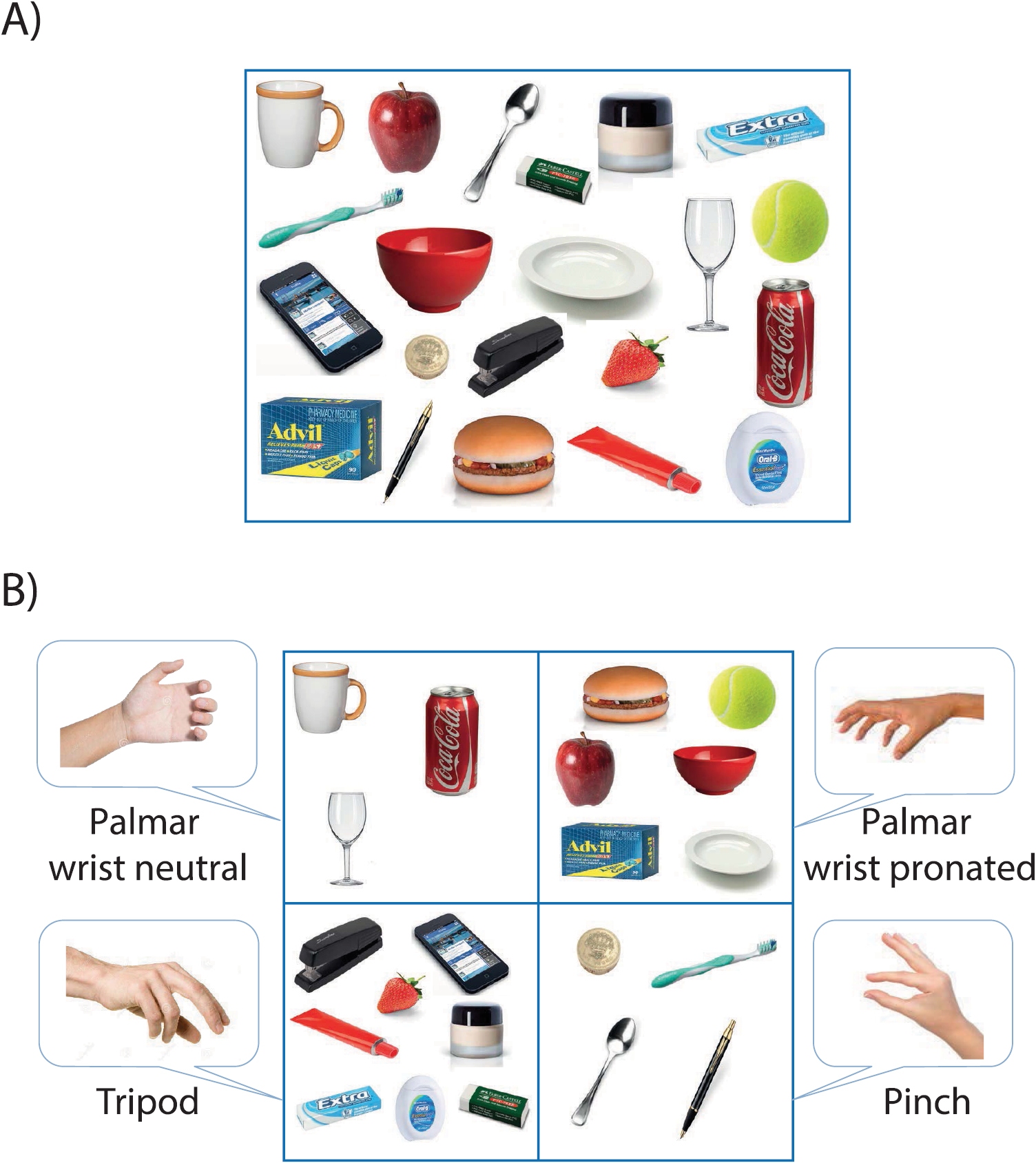 للمقارنة: التصنيف حسب فئة الكائن (أعلاه) أو حسب أحد أنواع الالتقاط الأربعة (أدناه)
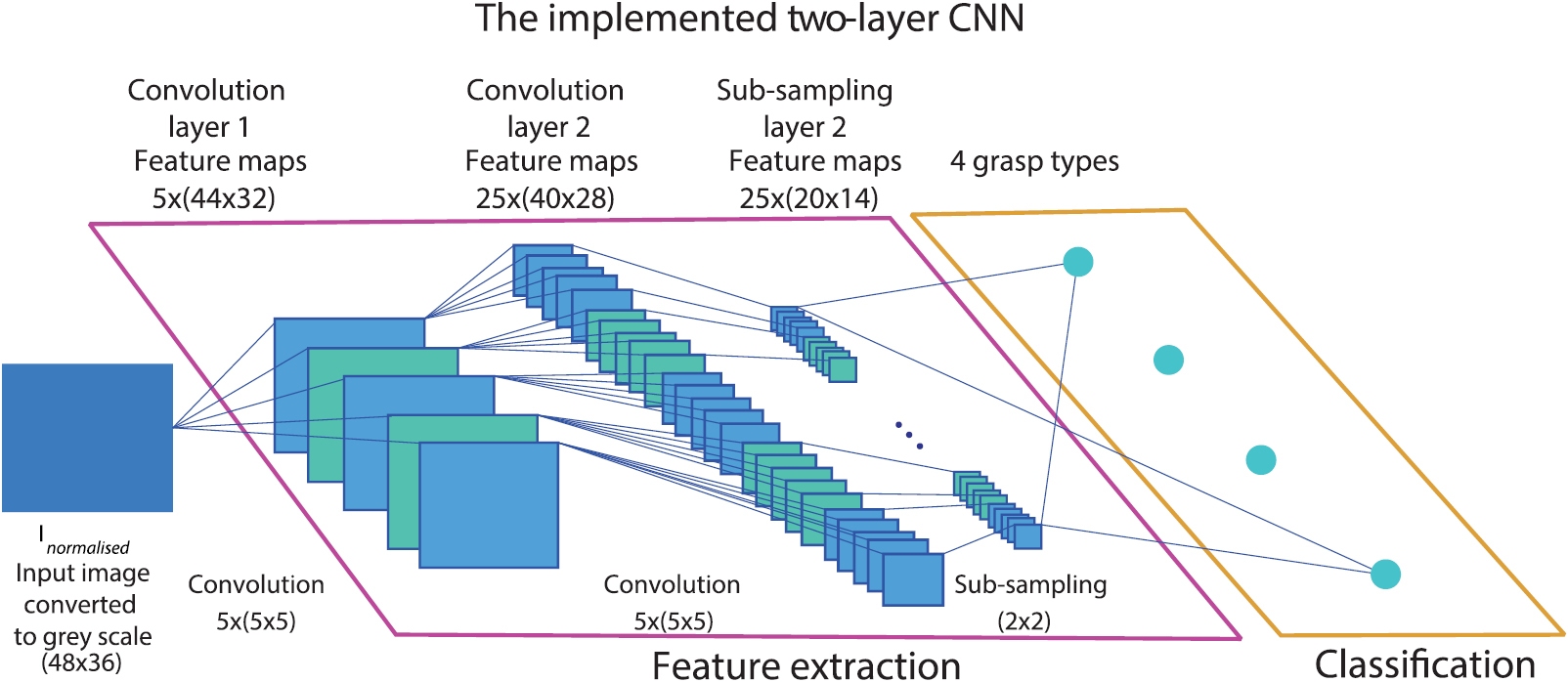
للمقارنة: التصنيف حسب فئة الكائن (أعلاه) أو حسب أحد أنواع الالتقاط الأربعة (أدناه)تم استخدام شبكة عصبية تلافيفية لتدريب النظام. اتضح أن هندستها مثالية لهذا النوع من المهام ، وبالتحديد للأطراف الاصطناعية في اليد. على سبيل المثال ، واجهت طرق أخرى للرؤية الآلية مشاكل عندما صادفت أشياء لا تقع ضمن أي من الفئات المعروفة. لكن تحديد الأشياء غير المعروفة يعد من أهم صفات الأطراف الاصطناعية ذات الرؤية الآلية. لذلك ، فإن الشبكة العصبية التلافيفية مناسبة بشكل مثالي لمثل هذه المهمة.
تم تدريب النظام في
بنك أمستردام للصور ، حيث يوجد عدد كبير من الأشياء المنزلية.
يظهر الشكل التوضيحي أدناه بنية شبكة عصبية تلافيفية من طبقتين لاستخراج المعالم وتصنيفها.
في الاختبارات على المرضى الحقيقيين مع الأطراف الاصطناعية ، تم اختبار النظام على 8 أشياء معروفة و 16 قطعة غير معروفة في وضع عشوائي. وتظهر نتائج المتطوعين في الرسوم البيانية على اليسار واليمين. مع مراعاة الأخطاء المسموح بها ، كانت دقة التعرف على الأشياء والتقاطها 88٪ و 87٪ للمتطوعين الأول والثاني ، على التوالي.
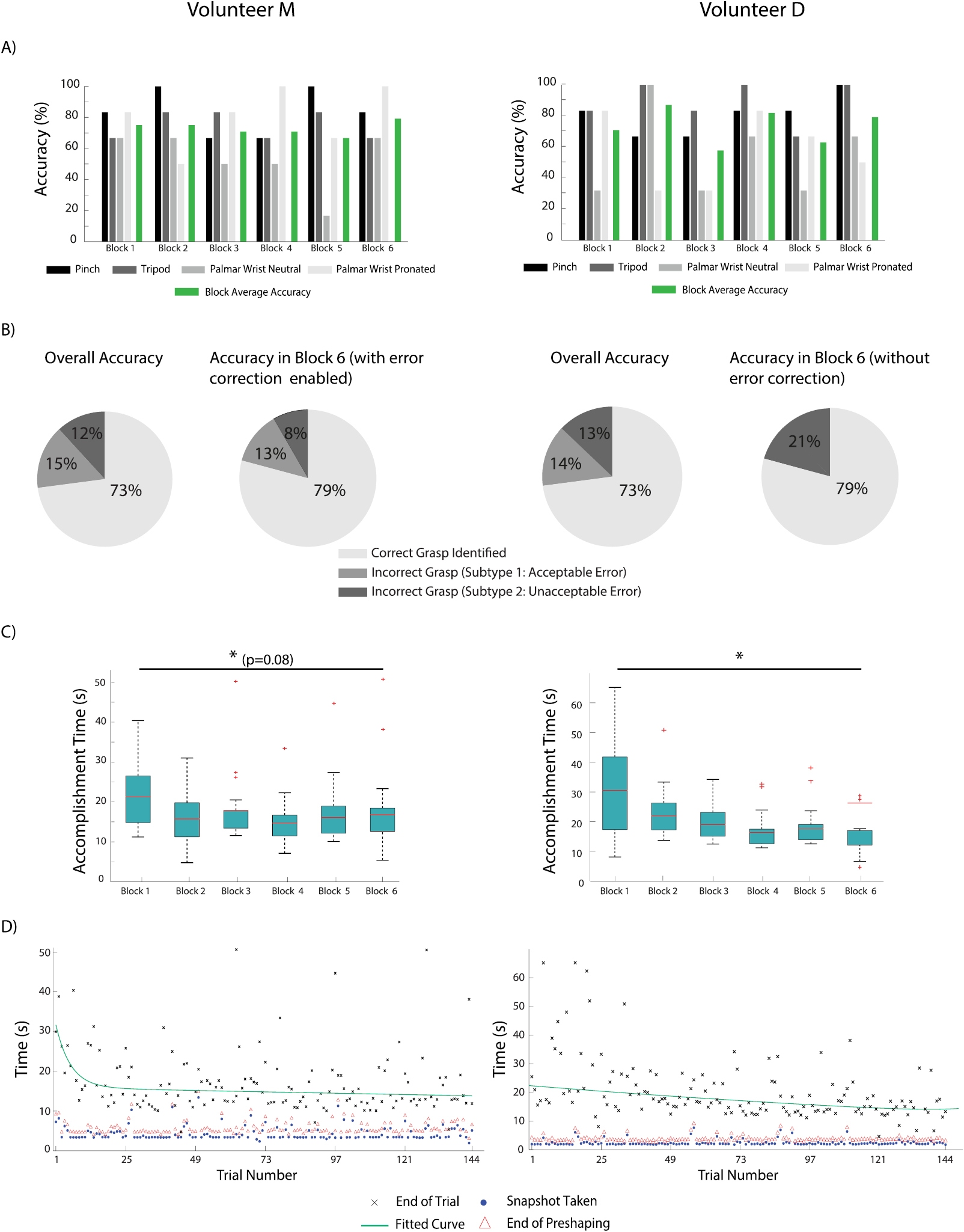
الأهم من ذلك ، أن هذا الطرف الاصطناعي يعمل في الوقت الفعلي تقريبًا: يتم تحديد نوع الالتقاط بالمللي ثانية ، على عكس 0.75-24 ثانية للأذرع الآلية ، حيث تقوم رؤية الماكينة بتصنيف الأشياء. حتى أفضل الأطراف الاصطناعية من هذا النوع ،
CyberHand و
SmartHand ، يمكنها التعامل مع التعرف في 4 و 1 ثانية على التوالي. إنهم يشغلون أجهزة كمبيوتر قوية ويظهرون دقة التقاط 93٪ و 94٪ على التوالي. على الرغم من أن الدقة أعلى قليلاً هناك ، إلا أن الالتقاط في الوقت الحقيقي أو مع توقف لمدة ثانية واحدة يعد فرقًا كبيرًا ، لذلك لا ينبغي الاستهانة بإنجاز المهندسين الطبيين البريطانيين. هذه هي أول يد بيونية يمكنها الإمساك بالأشياء "بشكل حدسي" ، كما لو كان ذلك بدون تفكير. لا يعطي الشخص إشارة إلا بحركة صغيرة للعضلة التي تحتاج إلى التقاط الجسم - واليد الذكية مع شبكة عصبية تقوم بالباقي بسرعة من تلقاء نفسها.
تم
نشر المقال العلمي في 3 مايو 2017 في مجلة
Journal of Neural Engineering (doi: 10.1088 / 1741-2552 / aa6802).