إذا كنت تطير قبل أن تطير من خلال النافذة إلى ما لا نهاية - فلا تتوصل إلى استنتاج سابق لأوانه أنه غبي. ربما يكون هذا روبوتًا مصغرًا مع نظام AI في وضع التعلم الذاتي.
 تحطمت طائرة بدون طيار 11500 مرة في الكائنات المحيطة ، وحلقت على طول مسارات تم اختيارها عشوائيًا
تحطمت طائرة بدون طيار 11500 مرة في الكائنات المحيطة ، وحلقت على طول مسارات تم اختيارها عشوائيًاكيف تعلم مركبة جوية بدون طيار أن تتحرك على طول مسار معين ، لتتجنب العقبات؟ هل من الممكن الاستغناء عن خريطة رقمية ثلاثية الأبعاد عندما يتعلق الأمر بالملاحة الداخلية؟ لحل هذه المشكلة ، هناك العديد من التقنيات المناسبة ، بما في ذلك
تدريب المحاكاة ، حيث يقوم المعلم بتعليم الطائرة بدون طيار على مسارات مختلفة ، وتصحيح أفعالها إذا لزم الأمر. تدريجيا ، يتعلم الطائرات بدون طيار الطرق. لكن هذا النهج محدود بشكل واضح بمجموعة بيانات الإدخال: لا يمكن للمعلم مرافقة الطائرة بدون طيار.
في السنوات الأخيرة ، بدأت أنظمة التعلم الآلي بدون معلم في التطور بسرعة (بإشراف ذاتي
التعلم). لقد أثبتت أنها ممتازة في عدد من المهام:
التنقل ،
ومسك الأشياء (في الروبوتات)
ومهام "الدفع / السحب" (الفيزياء الحدسية). ولكن هل أنظمة التعلم الذاتي قادرة على إتقان مثل هذه المهمة المعقدة مثل الملاحة الداخلية - والتغلب على قيود التدريب على المحاكاة؟
أظهرت الدراسات السابقة أن هذه الأنظمة قادرة حقًا على التعلم بدون معلم في جهاز محاكاة ، وأن المعرفة المدربة يمكن نقلها إلى العالم الحقيقي. ولكن من الناحية العملية ، هناك سؤال آخر أكثر صلة: هل يعمل التعليم الذاتي في العالم الحقيقي في غرفة اعتباطية ، بدون جهاز محاكاة وخريطة تم تجميعها مسبقًا؟ بعد كل شيء ، هذه مهمة بالضبط سيواجهها كل منا عندما يشتري روبوتًا ويعيده إلى المنزل. يجب عليه دراسة الوضع بشكل مستقل والبدء في التنقل في أي منزل (في السابق ، من الأفضل إزالة جميع الأشياء الهشة من الغرف وإخفاء نفسه أيضًا).
قام باحثون من جامعة كارنيجي ميلون (الولايات المتحدة الأمريكية) بتعيين المهمة الأكثر صعوبة من خلال وضع طائرة رباعية مع شبكة عصبية للتدريب الذاتي في أصعب غرفة التنقل مع عدد كبير من الغرف والأثاث. يؤكد المؤلفون على أن دراسات أخرى تحاول تبسيط البيئة من أجل تجنب الاصطدامات. على العكس من ذلك ، أرادوا دفع الطائرات بدون طيار إلى أقصى عدد من التصادمات والحوادث ، حتى يتمكن الروبوت من التعلم من هذه التجربة. لقد صمم العلماء نظامًا للدراسة الذاتية يأخذ في الاعتبار هذه التجربة السلبية ، بالإضافة إلى التجربة الإيجابية لرحلة ناجحة على طول المسارات.
تم اختبار quadcopter AR Drone 2.0 تحت سيطرة نظام التعلم الآلي في 20 غرفة في المنزل - ونتيجة لذلك ، تعلمت تجنب الاصطدامات بشكل فعال في كل من هذه الغرف. مدة التدريب - 40 ساعة طيران. يقول الباحثون أن تكلفة أجزاء الطائرات بدون طيار صغيرة وسهلة الاستبدال ، لذلك يمكن تجاهل احتمال وقوع حوادث كارثية.
كانت جميع التصادمات عشوائية تمامًا. تم وضع الطائرات بدون طيار في نقطة عشوائية في الفضاء - وطار في اتجاه عشوائي. بعد الحادث ، عاد إلى نقطة البداية - وطار مرة أخرى في اتجاه عشوائي ، حتى تحطم مرة أخرى في مكان ما.
يتم تصوير كاميرا quadrocopter بسرعة 30 إطارًا / ثانية ، وبعد الحادث ، يتم تقسيم جميع الإطارات إلى قسمين: يتم وضع الإطارات ذات المسار الجيد في المجموعة الإيجابية ، ويتم وضع الإطارات التي تم التقاطها مباشرة قبل التصادم في المجموعة السلبية. في عملية التدريب ، تحطمت الطائرة بدون طيار في الأجسام المحيطة 11500 مرة - وجمعت واحدة من أكبر قواعد حوادث الطائرات بدون طيار في العالم. تحتوي هذه "التجربة السلبية" على معلومات حول جميع الطرق الممكنة التي يمكن أن تتسبب بها طائرة رباعية في مكان ما.
تم نقل مجموعات من التجارب الإيجابية والسلبية كمدخلات إلى الشبكة العصبية ، التي تعلمت وضع توقعات حول ما إذا كانت تجربة إيجابية معينة من المسار الحالي ستؤدي إلى ظهور تجربة سلبية من عينة التصادم. أي أن الشبكة العصبية بدأت في التنبؤ بمكان السفر.
يتم عرض مخطط الشبكة العصبية في الرسم التوضيحي أدناه. تم حساب وزن الطبقات التلافيفية (الرمادية) مقدمًا وفقًا لتصنيف ImageNet ، ولكن في الطبقات المتصلة (البرتقالية) تم اختيار الأوزان بشكل عشوائي ، وتم استيعاب القيم المثلى أثناء عملية التعلم الذاتي ، استنادًا بالكامل إلى بيانات الحوادث. يوضح الرسم التوضيحي بيانات الإدخال - الإطارات من الكاميرا (يسار) وبيانات الإخراج للشبكة العصبية (قرار التحليق بشكل مستقيم أو الاستدارة لليسار أو اليمين).

يوضح الرسم البياني التالي أرضية اختبار - مبنى من أربعة طوابق حيث تم تدريب الطائرات بدون طيار.
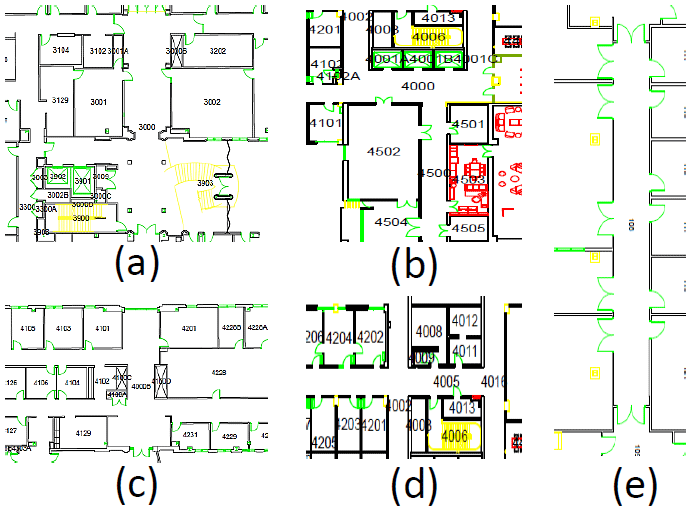
كان الناتج نظام ملاحة فعال بشكل مدهش للطائرات بدون طيار. يعتبر النهج البسيط إلى حد ما للتعلم الذاتي فعالًا جدًا للغرف التي بها عدد كبير من العوائق ، بما في ذلك العوائق المتحركة مثل الأشخاص.
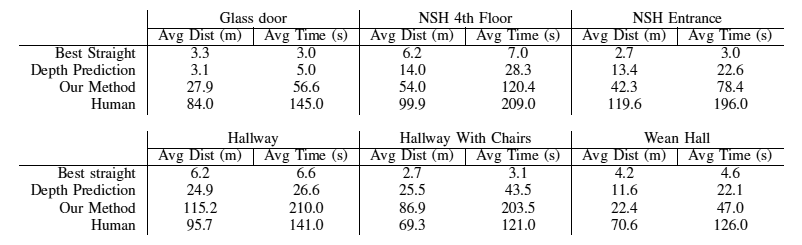
أظهر الاختبار المقارن أن نظام الملاحة هذا أكثر فعالية 2-10 مرات من
أنظمة الدراسة الذاتية مع تقدير المسافة أحادي . يظهر الاختلاف بشكل خاص بجوار الجدران الزجاجية والجدران دون علامات تحديد ، مما يعقد عمل الأخير بشكل تقليدي.
تم
نشر العمل العلمي في 19 أبريل 2017 على موقع ما قبل الطباعة arXiv.org (arXiv: 1704.05588v2).