اليوم أريد أن أخبركم قليلاً عما حدث للاهتمام منذ
نشر المقالة الأخيرة ، حيث أخبرت كيف صنع ثلاثة منا GPS تحت الماء في عام واحد.
قررنا في الوقت الحقيقي تقييم التباين بين نظام تحديد المواقع العالمي (GPS) تحت الماء ونظام تحديد المواقع العالمي (GPS) الحقيقي. وليس فقط مع نظام تحديد المواقع العالمي (GPS) ، ولكن مع بيانات GPS / GLONASS المدمجة. إذا كنت مهتمًا بما حدث ، فمرحبًا بك!
بشكل عام ، قمنا بفحص هذا بطريقة أو بأخرى ، ولكن في ظروف "بحرية" جيدة. الآن نشأت الفكرة للتحقق من كل شيء في بركة. هنا يجب أن أشرح أنه بالنسبة لأي المائية المائية تعتبر المسطحات المائية الضحلة (وليس عبثا) الأكثر صعوبة. بعض الشركات المصنعة لا تعمل في المياه الضحلة على الإطلاق ، يقولون أن هناك طبقة سطحية رهيبة مع الغاز المذاب وانعكاسات متعددة ، إلخ.
بشكل عام ، هناك
بركة رائعة بالقرب منا
هكذا تبدو من الشاطئ:

يبلغ أقصى عمق فيها حوالي 2-2.5 م ، أي أنه جسم أكثر ضحلة من الماء قد يكون مطلوبًا فيه التنقل ، فمن الصعب تخيله.
خصيصًا للتجارب القادمة ، تم شراء قارب طعم صيني يتم التحكم فيه عن طريق الراديو - مثالي لأغراضنا: يكفي (أحيانًا يبدو لي أنه كثير جدًا) قارب منخفض السرعة واسع ، والذي يسمح بسهولة بتعديلات مختلفة.
هكذا بدا القارب في الأصل:

ثم قمنا بعدد من التحسينات. بقيت الإلكترونيات الأصلية كلها تقريبًا وتم تحريكها قليلاً ، باستثناء آلية إعادة تعيين الطعم - لأنها غير ضرورية ، تم تفكيكها بالكامل.
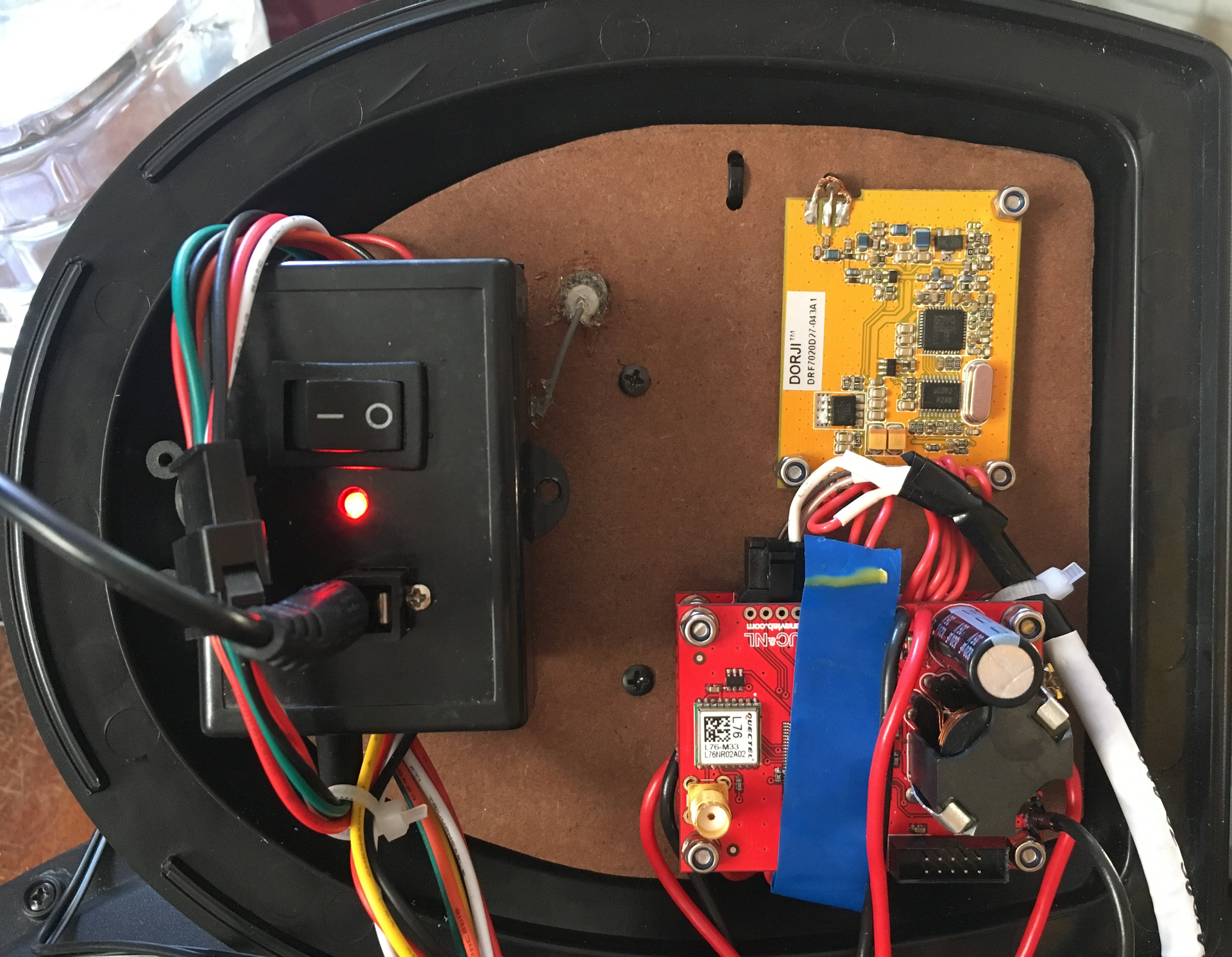
بالإضافة إلى تركيبه على القارب:
- لوحة بها جهاز استقبال GPS / GLONASS مملوك (غير مرئي في الصورة - تحت اللوحة الصلبة) ؛
- وحدة راديو DORJI 433 MHz + هوائي لها ؛
- لدينا مجلس مع معالج يوزع الإخراج من وحدة GPS ، جهاز استقبال الملاحة الصوتية ويرسل كل شيء عبر الهواء ؛
- بطارية رصاص إضافية 1.5 Ah * يتم إطعام جميع المستهلكين منها ؛
- موصل شحن Bulgin Bucaneer لذلك ؛
- مفتاح تبديل بغطاء مطاطي (كما هو الحال في عواماتنا) ، والذي يشمل جميع أنظمتنا ؛
- زوج من إدخالات الكبل البسيطة التي يتم من خلالها إدخال كبل جهاز استقبال الملاحة RedNODE داخل القارب ويتم إخراج كبل الباعث الصوتي (يستخدم في تجربة أخرى).
لوحة أخرى مرئية في الصورة - هذه فقط من تجربة أخرى.
كما قلت في مقال سابق ، فإن نظام تحديد المواقع العالمي تحت الماء هو نظام ملاحة طويل القاعدة ، ولتشغيله في بركة ، يجب تثبيت أربع عوامات ترحيل إشارات ملاحية عائمة. هذا هو السالب الرئيسي للقاعدة الطويلة - ما زلت بحاجة إلى وضع شيء على البركة ، مما يعني أنك بحاجة إلى قارب. لكن هذه المرة أردنا أن نبين كيف يمكن القيام بكل شيء حصريًا من الشاطئ.
كان هناك أربعة منا (نعم ، لم يعد هناك ثلاثة منا بعد الآن!) ، ووفقًا للفكرة ، أخذ الجميع عوامة معه وذهبوا إلى نقطته على ضفة البركة ، حيث وضع عوامة من الشاطئ على حبل (حتى لا يبحروا - لم يأخذوا القارب) .
هنا عند النقطة (Buoy No.4) بدا الأمر كالتالي:

على الشاطئ حيث كنت موجودا ، كان هناك نهجان مناسبان. كان زملائي على الشاطئ المقابل أقل حظًا - فهناك ببساطة شاطئ لطيف إلى حد ما ، متضخم مع القصب ، يدوسه الصيادون في بعض الأماكن. ونتيجة لذلك ، كما سيتبين من الموقع ، كان لا بد من تنفيذ الطفاف رقم 3 بعيدًا جدًا عن البقية ، لأنه ببساطة في ذلك المكان كان من الصعب جدًا الاقتراب من الماء.
توضح لقطة الشاشة أدناه كيف تم وضع (العوامات) خلال التجربة:

بالمناسبة ، بالنظر إلى المستقبل ، سأقول أنه يتم الحصول على إحداثيات العوامات من جهاز استقبال الملاحة ، ولا يتم قياسها مباشرة على الأرض.
تُظهر الصورة بوضوح شديد أنه يوجد على يسار الخط الشرطي بين العوامات رقم 1 ورقم 2 ضفة رملية. لدرجة أن البلشون يمشي هناك سيرًا على الأقدام (إنها على وشك ركبة واحدة) ، وهو ما لم ينجح هذه المرة.
من مشاركتي ، يبدو الشاطئ المقابل في الصورة التالية ، والشخص الذي يجلس على اليسار هو لنا ، وهو يحمل الطفو رقم 1 على الحبل.

في الصورة نفسها ، قاربنا نفسه مرئي في عملية الإبحار.
هذه هي الطريقة التي تبدو مجمعة بجانب إحدى عواماتنا:

كان لا بد من جعل كابلات العوامة أقصر من خلال سحبها إلى عين العوامة الحاملة مع ذراع التسوية النايلون ، وإلا فإن المرسل سيكون ببساطة مستلقيًا على قاع موحل. في الوضع الطبيعي ، تبلغ المسافة من حافة الماء إلى جهاز الإرسال الصوتي للعوامة 1.5 متر. يمكنك أيضًا رؤية أن جهاز استقبال الملاحة الصوتية مثبت على كبل طويل بما فيه الكفاية. يبلغ طوله 1.5 متر ، تذكر هذا ، في المستقبل سوف يشرح بعض ميزات النتائج.
إن تأثير الأسطوانة المعلقة بحرية على حركة القارب مهم للغاية. في الواقع ، أصبح نصف قطر الدوران غير اللائق بالفعل 3-4 أمتار مرعبًا: في الماء الهادئ يستغرق 10-15 مترًا للانعطاف. ستظهر محاولاتي لإبقاء القارب على المسار مع رياح جانبية خفيفة على المسارات الناتجة.
يتحدث عن المسارات. قبل التجربة ، لم يكن هناك يقين بنسبة 100٪ من أن النظام ، من حيث المبدأ ، سيعمل بشكل مناسب في مثل هذه الظروف. ومع ذلك ، رأيت النقطة الأولى على الشاشة بعد دقيقة تقريبًا من غمر جهاز الاستقبال في الماء.
رأيت هذا على شاشة تطبيقنا التكنولوجي ، شيء من هذا القبيل:
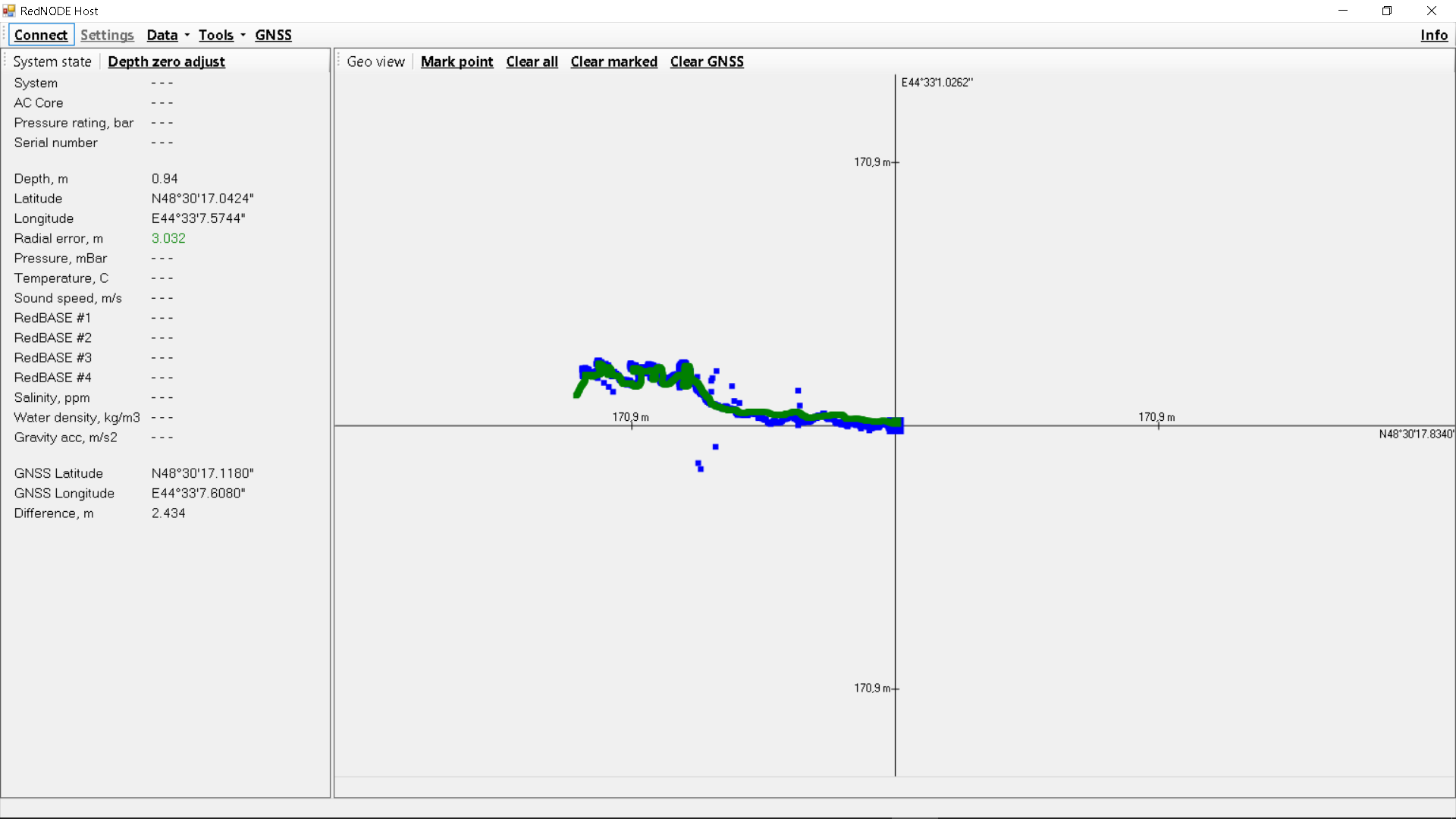
يتم عرض المسار من جهاز استقبال GPS / GLONASS باللون الأخضر ، ويتم عرض المسار من جهاز الاستقبال الصوتي باللون الأزرق. يعرض الخط السفلي في اللوحة اليسرى قيمة الفرق بالأمتار بين القراءة الحالية وفقًا لنظام GPS / GLONASS ونظام الملاحة الصوتية. يجب أن أقول على الفور أن "المجمع" للبيانات التي تم جمعها على عجل اختار جزءًا فقط من المعلومات التي يرسلها جهاز استقبال الملاحة وظلت العديد من الحقول فارغة.
وأخيرًا ، المسارات الناتجة بكل مجدها:
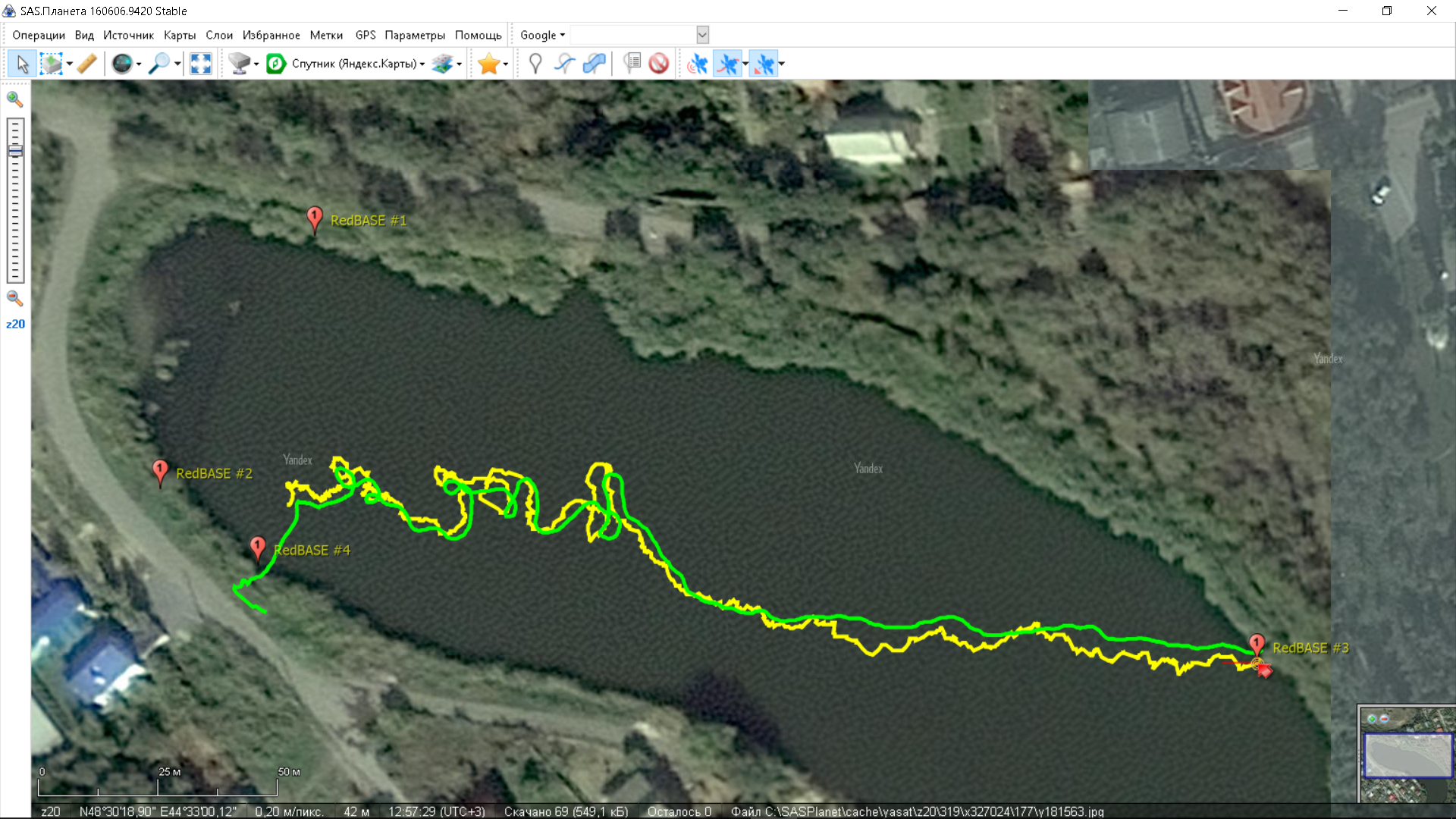
يبلغ الحد الأقصى للفرق بين المسارات في أماكن مختلفة حوالي 3 أمتار ، وهو ما يفسر أولاً من خلال حقيقة أن نظام السماعات يتأثر أكثر بكثير بحركة الجسم الموضوع على دقة الموضع المحسوب ، ببساطة لأنه بين استقبال الإشارات من العوامات تمكنت من التحرك بما فيه الكفاية ، وثانيًا ، حقيقة أن جهاز استقبال الملاحة الصوتية تدل على كابل بطول 1.5 متر خلف القارب مع جميع العواقب المترتبة عليه.
إن تكرار المسار مع بعض التأخير الذي تم الحصول عليه باستخدام نظام الملاحة الصوتية في تلك الأجزاء منه حيث كان القارب يناور بشكل مكثف يبدو مميزًا جدًا.
بشكل عام ، لم نخطط لمثل هذه الرحلة الطويلة خوفًا من فقدان القارب في القصب ، ولكن في مرحلة ما أدركت أنه من غير المحتمل أن أتمكن من نشر السفينة بأمان وقررت توجيهها في الريح ، والتي جلبتها للتو إلى عوامة رقم. 3 ، حيث تم تأمينه من قبل زميلي.
ماذا لدينا من نتائج التجربة؟
- يعمل النظام في خزان وحشي من حيث الهيدرولوجيا
- الدقة تضاهي دقة النظام العالمي لتحديد المواقع
- لا يتطلب أي معايرة
- لا يتكامل أكثر من جهاز استقبال GPS التقليدي
- لا يستغرق النشر الكثير من الوقت (في حالتنا ، كانت هناك ثلاث عوامات في الماء بعد 5 دقائق ، والرابعة بعد 10 أخرى ، ثم تم قضاء كل هذا الوقت للتجول في البركة)
من غير المناسب عرض المسارات بالتفصيل باستخدام الصورة ، لذلك أقوم بتحميل المسارات بشكل منفصل حتى يتمكن كل شخص مهتم من تحليلها:
المسارات RedWAVE 12-05-2017شكرا لكم على اهتمامكم.
"وهذا كل شيء لهذا اليوم!" (ج)
إنتباه! تحديث! كما اتضح ، إذا اتبعت الرابط إلى
بركتنا ، يمكنك أن ترى أن طائرة بدون طيار من المفترض أن تطير فوق مكان تجاربنا في وقت إطلاق النار على المنطقة:
