
يُنظر إلى الهياكل الخارجية الروبوتية على أنها مستقبل الصناعة وإعادة التأهيل البدني ومساعدة كبار السن ، ولكن التقدم في هذا المجال بطيء. ومع ذلك ، يمكن أن يتغير كل شيء بفضل
اختراع باحثين من كلية الهندسة في جامعة كارنيجي - ميلون. طوروا نظام تغذية مرتدة ينسق حركة الأطراف الروبوتية مع الخطوات البشرية.
لمدة ساعة ، يراقب النظام تنفس الناقل - ويغير بشكل متكرر 32 وضع الهيكل الخارجي حتى يجد أنسبها.
يعد تحديد نمط القوة المثلى لمحركات الهيكل الخارجي أثناء المشي مهمة صعبة. لكل شخص خصائصه الخاصة في المشي ، وتعتمد خصائص الخطوات على العديد من الظروف ، بما في ذلك السطح الذي يمشي عليه الشخص. لحل هذه المشكلة ، يستخدم المهندسون طريقة القوة الغاشمة عندما يقوم النظام باختبار توقيتات وسلطات مختلفة للعثور على الوضع الأمثل الذي يعطي أكبر فائدة استقلابية. ولكن لقياس فوائد التمثيل الغذائي ، تحتاج إلى قياس أنفاس مرتديها بشكل متكرر ، والذي بدوره يقلل من عدد الإعدادات التي يمكن اختبارها أثناء القوة الغاشمة. أي أنه من الصعب تنظيم الإجراء الأمثل هنا.
تصف مجموعة من الباحثين من كلية الهندسة في جامعة كارنيجي - ميلون في مقاله
العلمي خوارزمية تعمل على تحسين نمط عزم الدوران لجميع المحركات الخارجية خلال عملية تكرارية مدتها ساعة واحدة مع تقديرات في الوقت الحقيقي لمدخرات التمثيل الغذائي. يتكيف الهيكل الخارجي حرفياً مع الشخص ، ويتتبع تنفسه.
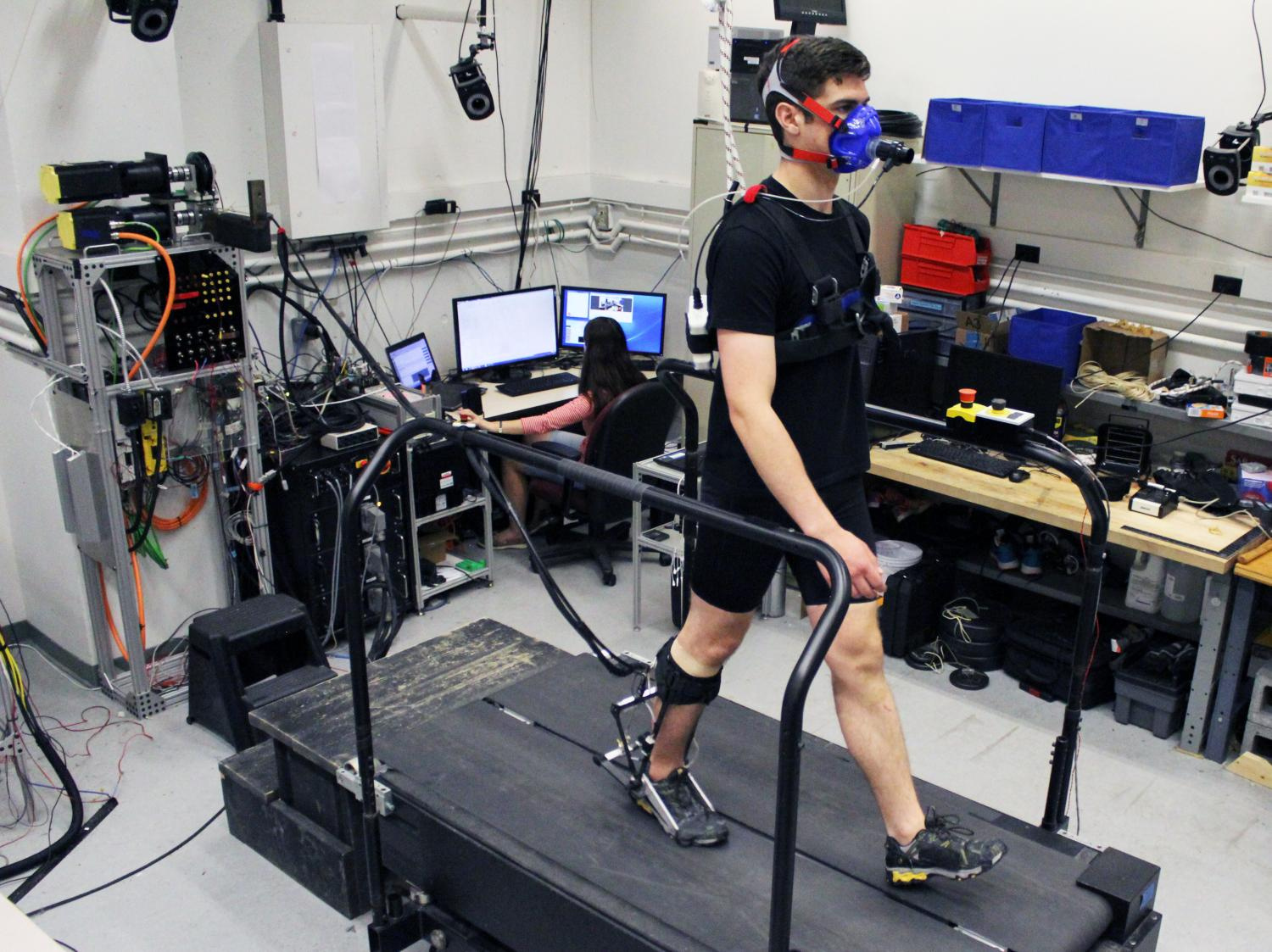
خلال الاختبارات العلمية لنظام تكراري مع شخص "في منتصف الدورة" على العديد من المتطوعين ، أظهر النظام متوسط توفير أيض 24.2 ± 7.4٪ مقارنة بالمشي مع الهيكل الخارجي مطفأ. أي أن الشخص ينفق طاقة أقل بنحو ربع عند استخدام الهيكل الخارجي. هذا الانخفاض أفضل قليلاً من النتائج التي تم الحصول عليها من قبل مجموعات بحثية أخرى ، ولكن هذه أرقام جيدة جدًا ، نظرًا لأن الهيكل الخارجي تم استخدامه لساق واحدة فقط.
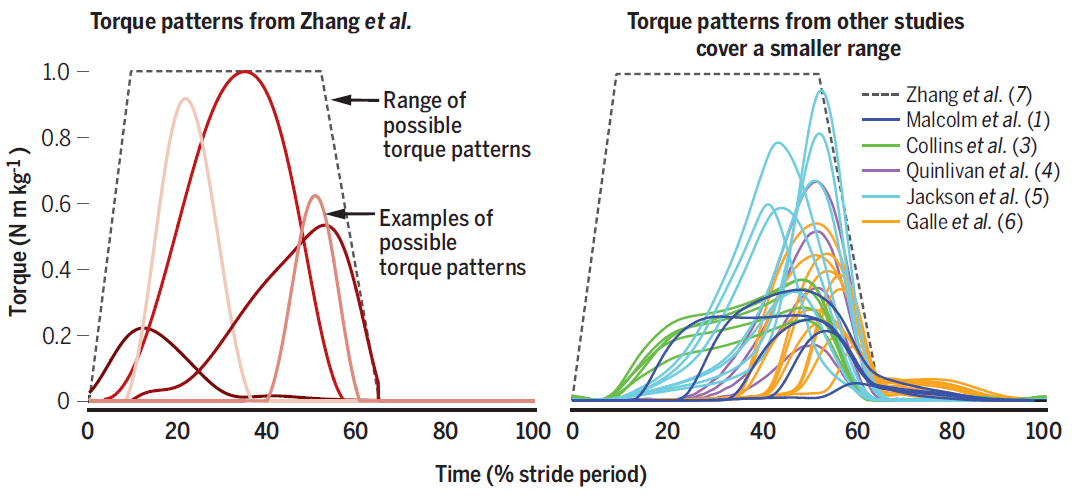
بالإضافة إلى ذلك ، بعد تحسين الخوارزمية ، تم تحسين النتائج على نفس الهيكل الخارجي. ولكن الأهم من ذلك ، أن هذا التدريب أسرع بكثير من استخدام القوة الغاشمة المعيارية ، وقد تم إثبات ذلك في دراسات أخرى. هذا يسمح لك بتجربة أنماط تشغيل أكثر تنوعًا أثناء القوة الغاشمة (انظر الرسوم البيانية).
يتيح لك هذا المخطط التفاعلي مع المراقبة المستمرة للتنفس البشري (الإنسان في الحلقة) التكيف مع الحالة الحالية للشخص ، مع مشيه في الظروف الحالية.
لماذا كانت طريقة التكيف مع المشي أكثر فعالية من الطرق الأخرى؟ منذ السبعينيات ، أظهر العلماء أن الممارسة المتغيرة هي التي تساهم في اكتساب المهارة. قبل ذلك ، كان يعتقد أن التدريب يجب أن يتم في ظل ظروف ثابتة دون تغيير. بشكل تقريبي ، يجب على الشخص تكرار نفس الشيء عدة مرات من أجل تعلمه واكتساب مهارة. لكن لا. كما اتضح ، يجب أن تكون الممارسة متغيرة: يجب أن تتغير الظروف - لذا فإن اكتساب المهارات يسير بشكل أسرع. منذ ذلك الحين ، تم استخدام ممارسة متغيرة في الطب والرياضة والتدريب المهني. لذا ، يبدو أن خوارزمية المهندسين في جامعة كارنيجي - ميلون تستخدم هذا المبدأ ، الذي استخدم منذ فترة طويلة لتعليم الناس. يتم تحقيق وفورات التمثيل الغذائي الموضحة هنا من خلال مزيج من تحسين عزم الدوران الفعال والتكيف البشري مع مجموعة واسعة من أنماط عزم الدوران التي يتم فرزها في هذه العملية.
يقترح مؤلفو العمل العلمي أنه بهذه الطريقة يمكن تسريع عودة المهارات الحركية الكاملة للمرضى الذين يعانون من ضعف هذه المهارات ، على سبيل المثال ، بعد السكتات الدماغية. إن تباين عزم الهيكل الخارجي سيوفر بيئة تعليمية متغيرة حيث تتعافى مهارات المريض بشكل أسرع. إنه مثل الركض على التضاريس الوعرة ، والتي تدرب الأرجل بشكل أفضل بكثير من الركض على جهاز المشي المسطح. بدلاً من المشي بنفس الجهد كل يوم ، سيتعين على الشخص التكيف وتغيير السرعة والجهد: سيكون هذا تمرينًا فعالًا حقًا.

بالإضافة إلى ذلك ، يخطط العلماء لتعيين أنفسهم مهمة أخرى. إذا كان الهدف الرئيسي الآن هو الحفاظ على التوازن الأيضي (أي توفير الطاقة العادي) عند المشي ، فيمكنهم في المستقبل تحديد هدف جديد للتحسين: السرعة. في السنوات الماضية ، أظهرت الدراسات العلمية أن الهياكل الخارجية يمكنها بالفعل زيادة سرعة الشخص العادي عند المشي. لقد حان الوقت للتحقق مما إذا كان يمكن القيام بذلك دون المساس بتوازن التمثيل الغذائي.
على أي حال ، فإن الهيكل الخارجي التفاعلي ، الذي يراقب تنفس المشاة وتوازنه الأيضي ، يعمل وفقًا لبرنامج معين - أليس هذا هو المستقبل؟ حتى الشخص السليم لن يرفض مثل هذا الجهاز. على سبيل المثال ، في الوضع العادي ، يجعل الهيكل الخارجي ببساطة المشي أسهل. ولكن إذا تأخرت عن اجتماع ، فاضغط على زر Turbo ، وبدأ الهيكل الخارجي في العمل في وضع أولوية السرعة.
نُشر المقال العلمي في مجلة
ساينس في 23 يونيو 2017 (دوى: 10.1126 / science.aan5367).