أول نظام ملاحة صوتي محلي متوفر تجاريًا تحت الماء UKB-system
نحن لا نفقد السرعة. منذ نشر مقالنا السابق
تحت نظام تحديد المواقع العالمي تحت الماء: استمر الاستمرارية تقريبًا في الصيف ، واليوم سأخبرك بما قمنا به طوال هذا الوقت.
في المقالة الأولى حول
نظام تحديد المواقع العالمي (GPS) تحت الماء ، قمنا بمراجعة موجزة لأنظمة تحديد المواقع الحالية والصوتية تحت الماء على وجه الخصوص.
تحت التخفيض ، سأتحدث عن كيف قمنا بإنشاء نظام قاعدة فائقة القصر.
لذا ، في العام 2015 ، تعهدنا بالانخراط في أنظمة UCB (USBL - خط الأساس فائق القصر). جوهر هذه الأنظمة هو وجود مصدر إشارة (المرشد-مستجيب ، على سبيل المثال) وهوائي يحدد اتجاه وصول الإشارة. صفيف مرحلي أو ببساطة: هوائي تحديد الاتجاه.
تحدث العديد من مستخدمينا بطريقة أو بأخرى عن الإزعاج النسبي لإجراء وضع التعويم ، وأن الإحداثيات يتم وضعها "أدناه" (كما هو الحال في نظام تحديد المواقع العالمي تحت الماء).
في بعض الأحيان ، ترغب
دائمًا في ربط منارة بكائن موصول (غواص أو TNPA / ANPA) وتحديد الموقع نسبة إلى نقطة التحكم السطحية (القارب ، الرصيف ، إلخ) عن طريق خفض هوائي USBL في الماء. من حيث سهولة النشر ، فهو النظام الأكثر ملاءمة وبساطة. على سبيل المثال ، MicronNAV المذكور في مقالتنا الأولى هو نظام USBL نموذجي ، وكذلك
هذا النظام . تم التخطيط أيضًا لنظام NaviMate الرائع سيئ السمعة كنظام UKB: يجب أن توجه عوامة عائمة الغواصين ، وتحسب موقعها المطلق وتعيدها إليهم.
الشيء هو إيجاد شيء هوائي شائع جدا. على سبيل المثال ، تحتوي الغواصات على صفائف هوائية متوافقة تحتوي على آلاف المحولات الفردية. بالطبع ، لا يمكن القول أنه لم يقم أحد بعمل أنظمة UKB أمامنا في روسيا. ومع ذلك ، بقدر ما نعلم ، نظامنا هو أول نظام محلي متوفر تجاريًا (وعمومًا أكثر بأسعار معقولة!).
لكن لا شيء في هذا الكون مجاني. من أجل الراحة عليك أن تدفع. وفقًا لزميلنا ، الذي طور خوارزمية تشغيل نظام تحديد الاتجاه ومؤلف البرنامج الثابت لهوائي تحديد الاتجاه:
"سيستمتع مستخدم UXB بسهولة النشر ... أول 10-15 دقيقة. مثلما هو مطلوب لوضع عوامات نظام طويل القاعدة في منطقة المياه ".
والحقيقة هي أن الخطأ في تقدير وقت الوصول بمقدار 1-2 متر في نظام طويل القاعدة لن يسبب الكثير من الطقس ، لأن ± 1 متر خطأ مقبول تمامًا في مهام تحديد المواقع للغواصين أو الروبوتات.
سيؤدي الخطأ في تعريف الشعاع "الأول" أو "المباشر" ، في حالة نظام UHF ، إلى تحديد اتجاه وصول بعض الانعكاس (أو مجموع الانعكاسات - "الأشعة") ، ولكن يمكن أن يأتي من أي مكان ، كل هذا يتوقف على منطقة مائية محددة. هذا يؤثر بشكل خاص على تحديد الزاوية العمودية. التقط الانعكاس من السطح أو من الأسفل والآن لديك مجموعة من القيم في نطاق 90 درجة ، وهذا هو نظام الملاحة.
في الأنظمة الحديثة (ولدينا أيضًا) ، لا يتم أخذ الزاوية الرأسية في الاعتبار. بدلاً من ذلك ، يحتوي جهاز المرسل-المستجيب على مستشعر عمق مدمج ويمكنه نقل عمقه عند طلب هوائي تحديد الاتجاه. علاوة على ذلك ، مع معرفة الفرق في الأعماق والمدى المائل ، يتم تحديد المسافة على طول السطح بشكل تافه من نظرية فيثاغورس.
بالإضافة إلى ذلك ، تقف مهمة وضع الهوائي نفسه بشكل منفصل. يتم إنزالها على كبل من وعاء دعم أو من رصيف ، وتتدحرج وتلتف في الأمواج والتيارات. وفقًا لذلك ، إذا تم تحديد زاوية وصول الإشارة في نظام إحداثيات الهوائي ، وكان غير مستقر ، فإن عدم الاستقرار هذا يمر إلى الموقع المحسوب للكائن الموضوع.
في كثير من الأحيان ، لتجنب مثل هذه المشاكل ، يتم تثبيت الهوائي على عمود. نقوم بذلك أيضًا ، على الرغم من أن هوائينا يحتوي على AHRS مدمج.
سمينا نظامنا زيما.
في المستقبل القريب نخطط لإصدار نسخة محسنة تسمى Zima blizkoيتكون نظامنا من هوائي الإرسال والاستقبال الأكثر تحديدًا Zima-B (ase). يمكن رؤيته في الصورة أدناه.
 الشكل 1 - Zima-B - هوائي تحديد الاتجاه مثبت على قضيب
الشكل 1 - Zima-B - هوائي تحديد الاتجاه مثبت على قضيبومنارات المستجيبين Zima-R (esponder) ، والتي يمكن أن تكون قائمة بذاتها ، ومجهزة ببطارية (كما في الصورة) ، ووصلة مع الناقل.
في هذه الحالة ، يصبح المستخدم متاحًا لجميع ابتكاراتنا ووسائل الراحة لدينا:
- القدرة على إرسال ما يصل إلى 32 من أوامر التحكم عن بعد
- القياس المتبادل للمسافة إلى هوائي تحديد الاتجاه
- نقل السمت إلى المحطة الأساسية (إذا كان هناك جهاز على الوسائط يحدد الاتجاه إلى الشمال - بوصلة في عامة الناس)
يكون جهاز المرسل المستجيب في نفس الشكل مثل جهاز استقبال GPS تحت الماء RedNODE. كما ذكرنا من قبل ، فإنه يحتوي على مستشعر ضغط / درجة حرارة مدمج لمجموعة من 0-30 بار ويسمح بالحصول على دقة تصل إلى 0.05 متر في العمق وتصل إلى 0.1 درجة في درجة الحرارة. الهوائي ، بالمناسبة ، مجهز أيضًا بنفس المستشعر ، لأنه بطريقة ما غير مبتكر لقياس العمق بواسطة الكبل.
 الشكل 2 - Zima-R - مرسل مستجيب منارة (مع حزمة بطارية)
الشكل 2 - Zima-R - مرسل مستجيب منارة (مع حزمة بطارية)أجرينا الاختبار العام للنظام في 3 أغسطس من هذا العام على نهر Pichuga في منطقة Volgograd ، بالقرب من المكان الذي يتدفق فيه إلى خزان Volgograd. هذه هي "ساحة التدريب" المفضلة لدينا ، فنحن نعرف كل الحفر وعناصر الملف الشخصي شخصيًا.
عادة ما يكون الطقس حارًا جدًا في أواخر يوليو وأوائل أغسطس. تظهر طبقة عليا ساخنة على الخزانات (يحدث خط
حراري ) ، ويبدأ الماء في الازدهار ، بشكل عام ، تصبح الظروف صعبة. فقط في مثل هذا وتحتاج إلى اختبار المعدات. بعد كل شيء ، لا أحد مهتم بالخصائص التي حصلت عليها في حوض قياس غارق تمامًا ، يعمل الجميع في المسطحات المائية الحقيقية.
صورة لحظة العمل للغلاف الجوي:
 الشكل 3 - المدير الهندسي ، رئيس مصمم نظام USBL ، ومدير البحث والتطوير (من اليسار إلى اليمين) =)
الشكل 3 - المدير الهندسي ، رئيس مصمم نظام USBL ، ومدير البحث والتطوير (من اليسار إلى اليمين) =)يمكن أن يعمل هوائي واحد مع 23 مستجيبًا (على الرغم من صعوبة تخيل مثل هذه المهمة ، ولكن لا يزال). يتم فصل المنارات برمز ، ويتم العمل مع كل منها بالتتابع.
تظهر الصورة التالية لقطة شاشة للمضيف (برنامج التحكم عن بعد):
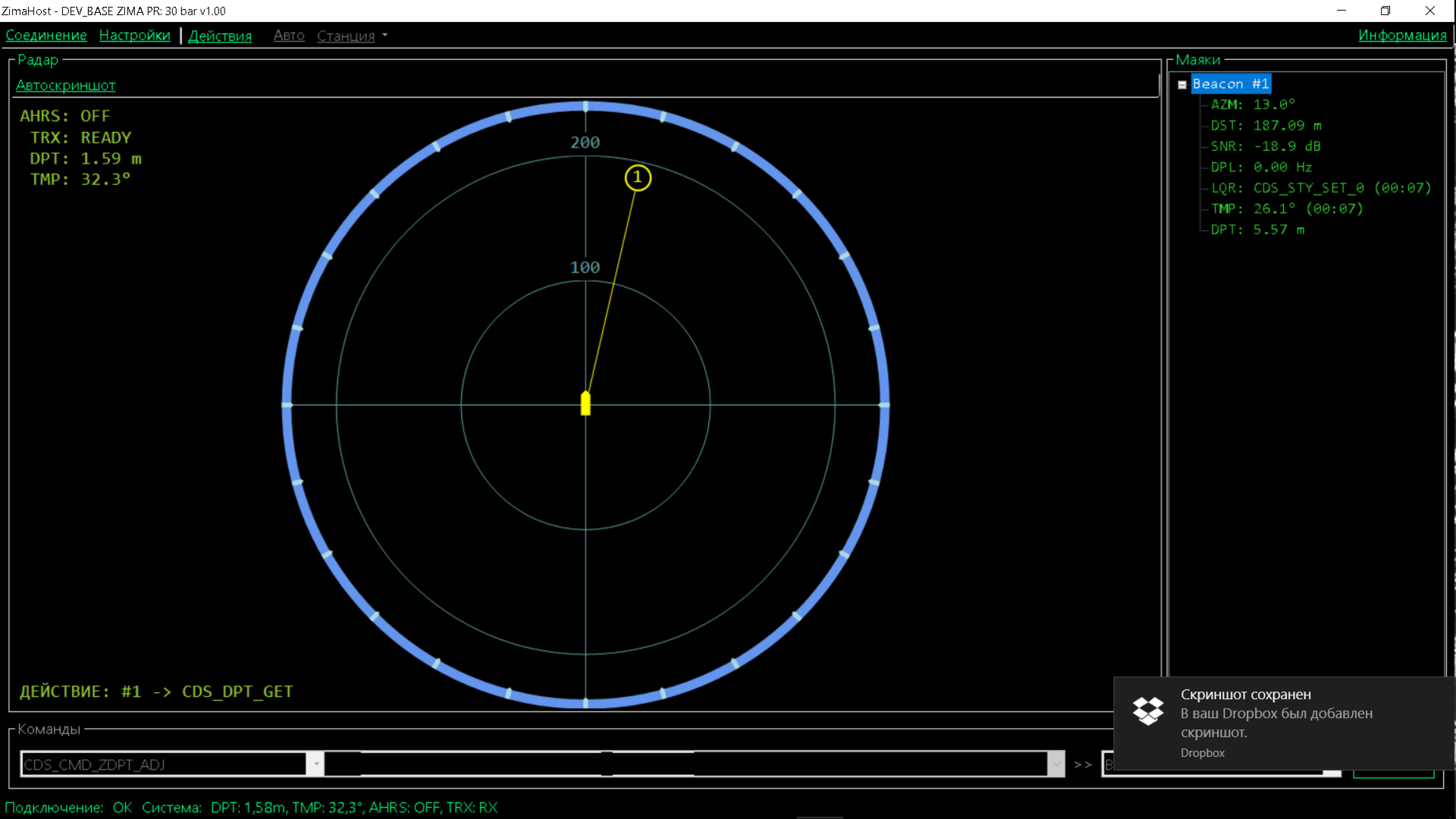
الشكل 4 - لقطة شاشة لمضيف Zima USBL
يتم توصيل الهوائي بالكمبيوتر عن طريق محول UART-USB. حسب التقاليد ، نستخدم بروتوكول (مفتوح) يشبه NMEA0183 وجميع رموز المصدر للمضيفين مفتوحة على
github .
يرجى ملاحظة ما يلي: تظهر لقطة الشاشة أن المنارة على عمق 5.5 متر ، ودرجة حرارة الماء على مستشعرها هي 26.1 درجة مئوية (!) ، وعلى الهوائي نفسه ، الذي يتدلى على بعد متر ونصف من السطح ، يبلغ 32.3 درجة مئوية (CARL!) ، عند عمق المكان في هذه المنطقة حوالي 15-20 مترا.
من الإعدادات الخارجية ، يحتاج النظام إلى الملوحة فقط (التي يتم من خلالها تحديد سرعة الصوت من خلال قراءات العمق ودرجة الحرارة) والحد الأقصى للمسافة (يتم حساب أقصى وقت انتظار لاستجابة المنارة منه). وفقًا لطريقتنا (التي تنتظر الحصول على براءة اختراع لها) ، يمكن للمنارة أيضًا تحديد المسافة إلى الهوائي ودعم وظيفة ضبط ملوحة الماء عن بُعد من المحطة الأساسية.
وأخيرًا ، الشيء الأكثر قيمة الذي حصلنا عليه في هذه التجربة (باستثناء الدباغة) هو فيديو مدته 7 دقائق (لقطة شاشة) للمضيف:
ZimaHost - فيديواسمحوا لي أن أشرح أن المنارة كانت ثابتة بلا حراك - ممتدة بين المرساة والعوامة ، وهوائي مثبت على القضيب معلق من جانب القارب (المطاطي). النسبية للحركة ، إذا جاز التعبير: المنارة تجعل اللفة سريعة الشرف مع نصف قطر أكثر من 100 متر ، والذي يحدث في الواقع بسبب دوران القارب ، وبالتالي الهوائي.
لدينا دائما شيء نقوله. إذا كان هناك شيء بدا غير مفهوم أو تم الكشف عنه بشكل سيئ - فمرحباً بك في التعليق. سنقوم أنا وزملائي بفرز الأمور.
ملاحظة: في هذه الاختبارات ، قمنا باختبار ليس فقط نظام Zima ، ولكن أيضًا العديد من الأدوات الأخرى المثيرة للاهتمام ، والتي سأحاول الكتابة عنها في أقرب وقت ممكن.
في انتظارك:
- صوت الرئيس بعد 700 متر من البكتيريا الزرقاء
- قضية لاستدعاء الغواصين
- صورة اللغز (الآن!)
حاول أن تخمن من الصورة نوع الجهاز وسبب حاجته: