الخيال العلمي مليء بالروبوتات الطائرة. هناك أيضًا روبوتات بشرية تحلق في صورة الإنسان. هذه آلات مستقلة ، وهيكل خارجي ، يتم التحكم فيه من الداخل ، مثل الرجل الحديدي. لكن في الواقع ، لم نر مثل هذه الروبوتات بعد. هناك طائرات هليكوبتر متعددة ، لكنهم لا يستطيعون المشي على الأرض ، مثل الشخص. قرر المهندسون من المعهد الإيطالي للتكنولوجيا تصحيح هذا النقص - فقد طوروا
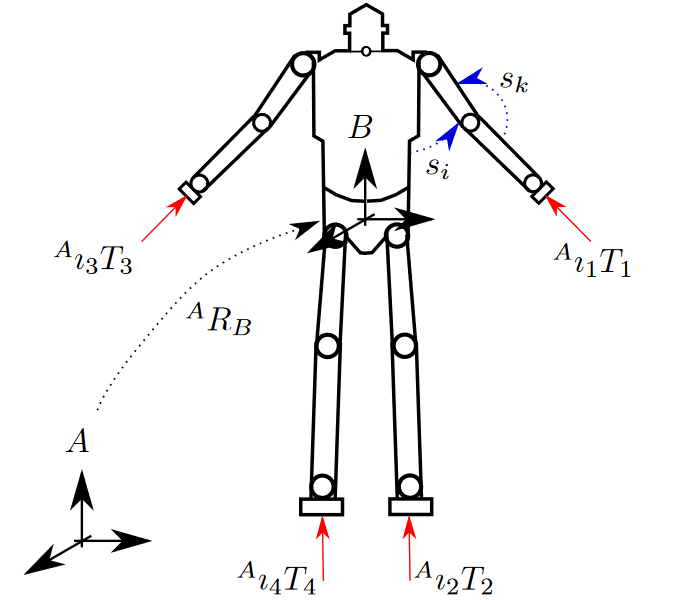
بنية الروبوت الروبوت iCub الطائر مع أربعة محركات نفاثة ونظام تحكم له.
هذا هو واحد من أول الروبوتات في العالم القادرة على الطيران والمشي والتلاعب بالأشياء ، أي التقاطها بواسطة المتلاعبين.
تعتبر الروبوتات البشرية تقليديا على أنها آلات أرضية تتحرك على السطح. لكن العلماء الإيطاليين متأكدون من أنه إذا أضفت محركات نفاثة إلى مثل هذا الروبوت ، فإن نطاق استخدامه سيتوسع بشكل كبير ، لأنه سيكون له درجات أكثر من الحرية. إذا قورنت بالمركبات الجوية التقليدية بدون طيار ، فهي أيضًا مجهزة أحيانًا بملاعب يمكنها التقاط الأشياء ، ولكن مرة أخرى ، يتمتع الروبوت الروبوت بميزة عليها ، حيث يمكنه المشي على الأرض. هذا يزيد من الموثوقية وكفاءة الطاقة للنظام.
في مشروع المعهد الإيطالي للتكنولوجيا ، تم تثبيت أربعة محركات نفاثة على المستجيبات الطرفية ، أي "أذرع" و "أرجل" الروبوت. يبدو هذا الترتيب للمحركات غير طبيعي بعض الشيء ، ولكن في الواقع ، تم اختبار مثل هذه الدائرة المتعددة الوسائط بالفعل في تصميمات أخرى. يقول المهندسون إنه يسمح لك بتثبيت المسار المحسوب بالنسبة لمركز الكتلة ، مع مراعاة الانحرافات الصغيرة في اتجاه إطار دعم الروبوت.
التنمية الإيطالية أبعد ما تكون عن التنفيذ العملي. يسميها المطورون "الخطوة الأولى لإنشاء روبوتات تحلق على البشر" وهي بالفعل الخطوة الأولى. ما فعله المهندسون هو تطوير إطار أساسي للتحكم في
محاكاة روبوت iCub أثناء التمرير الثابت في الهواء والحركة السلسة. يتم احتساب دفع المحرك أيضًا في برنامج المحاكاة ويؤخذ في الاعتبار عند حساب نظام التحكم. يثبت هذا العمل أن إنشاء مثل هذا الروبوت والتحكم فيه أمران ممكنان
نظريًا ، على الرغم من أن المطورين لم يأخذوا في الاعتبار التأثيرات الديناميكية الهوائية والعوامل الأخرى التي يمكن أن تظهر في التشغيل العملي للروبوت. كل شيء سيكون له وقته - كل من هذه الحسابات والتجارب الأولى مع الرحلات الحقيقية ستكون لاحقًا ، ولكن المهمة الآن كانت التأكد من أنه من الممكن نظريًا التحكم في حركة هذه الآلية في الهواء.
يُظهر الفيديو كيف يتجمد الروبوت في مكان واحد ، ويحسب أيضًا المسار المطلوب لمركز كتلته.
وقال دانييل بوتشي ، أحد مطوري iCub ، لـ
IEEE Spectrum أنه كان لديه فكرة إنشاء مثل هذا الروبوت قبل أربع سنوات عندما انتقل إلى العمل في المعهد الإيطالي للتكنولوجيا. ثم فكر في كيفية تطبيق تطوراته في مجال التحكم في الطائرات بدون طيار على الروبوتات مع "أجزاء الجسم" المختلفة ، أي أنها ليست هيئة جامدة تمامًا.
تعتقد دانييل بوتشي أن الروبوتات الطائرة من نوع البشر لها مزايا عديدة مقارنة بالطائرات متعددة المروحيات التقليدية المزودة بمعالجات آلية. غالبًا ما يعاني هذا الأخير من مشاكل في الطقس العاصف ، لأنه لا يمكنه الوقوف بثبات على الأرض ، وبالتالي يتطلب تحكمًا أكثر دقة عند محاولة التقاط جسم ثابت. علاوة على ذلك ، يحتوي الروبوت على متلاعبين ، وليس واحدًا ، مما يبسط المهمة.
ميزة أخرى اجتماعية. في المستقبل ، يمكن استخدام هذه الروبوتات بالفعل كهيكل خارجي للبشر ، على صورة الرجل الحديدي. يوضح مثال
ريتشارد براوننج الذي سحب هيكل خارجي أن مثل هذه الاختراعات ستكون مطلوبة - في الواقع ، من منا لا يريد أن يطير في صندوق حديد بمحركات نفاثة؟
 حلق ريتشارد براوننج على ارتفاع متر فوق سطح الأرض
حلق ريتشارد براوننج على ارتفاع متر فوق سطح الأرضتم
نشر المقالة العلمية في 16 فبراير 2017 على موقع الطباعة المسبقة arXiv.org (arXiv: 1702.06075) وتم تقديمها للنشر في مجلة
IEEE Robotics and Automation Letters .