 Carcraft ، برنامج لبناء عالم افتراضي
Carcraft ، برنامج لبناء عالم افتراضيفي زاوية حرم Alphabet ، هناك فريق يعمل على البرامج التي يمكن أن تكون المفتاح لإنشاء أجهزة الروبوت. لم يره أي صحفي من قبل. يسمونه Carcraft ، بعد اللعبة الشهيرة World of Warcraft.
يبتكر منشئ البرنامج ، وهو مهندس شاب ذو شعر مجعد ووجه صبي ، جيمس ستاوت ، بجانبي في مكتب مفتوح حيث يسود الصمت ويستخدم الجميع سماعات الرأس. تعرض الشاشة جزءًا من طريق افتراضي بحركة دائرية. لا يوجد شيء يلفت الانتباه - صورة بسيطة لعدة خطوط وخلفية مع زخارف الطريق. نرى سيارة Chrysler Pacifica الآلية ذات الدقة المتوسطة وإطار سلكي بسيط يمثل مركبة أخرى.
قبل بضعة أشهر ، تعثر فريق التطوير على مثل هذه الحركة الدائرية في تكساس. جعلت سرعة وتعقيد حالة الطريق السيارة في وضع صعب ، لذلك قرر الفريق بناء جزء من الطريق بنفس التكوين على موقع الاختبار. وأنا أتطلع بالفعل إلى المرحلة الثالثة من عملية التدريب: رقمنة القيادة الحقيقية. هنا ، يمكن لمناورة السائق الوحيدة من العالم الحقيقي - على سبيل المثال ، سيارة تقطعك في حركة دائرية - أن تتحول إلى آلاف السيناريوهات المحاكاة التي تستكشف حدود قدرات السيارة.
تشكل مثل هذه السيناريوهات أساس أداة محاكاة قوية. يقول لي ستاوت: "إن معظم العمل على الميزات الجديدة مدفوع بما رأيناه في المحاكاة". قامت هذه الأداة بتسريع تطوير المركبات الروبوتية في Waymo ، التي أنشأتها Alphabet (فتاة Google) من وحدة البحث X في ديسمبر 2016.
إذا استطاعت Waymo إنشاء سيارات مستقلة تمامًا في السنوات القليلة القادمة ، فيجب تذكر Carcraft كعالم افتراضي لعب دورًا مهمًا في تغيير العالم الحقيقي الذي تم إنشاؤه عليه.
في البداية ، تم تصميمه للتمرير عبر المشاهد التي تواجهها السيارات عند السفر على الطرق العامة. تلعب الآن Carcraft ، وبشكل عام جميع عمليات المحاكاة ، دورًا متزايدًا في تطوير المركبات الآلية.
في كل نقطة زمنية ، يحرّر حوالي 25000 سيارة آلية افتراضية نسخًا كاملة من نماذج أوستن وماونتن فيو وفينيكس ، بالإضافة إلى العديد من المسارات الاختبارية. يمكن لـ Waymo لعب محاكاة رحلة على طول طريق صعب بشكل خاص مئات الآلاف من المرات في اليوم. في المجموع ، في العالم الافتراضي ، تقود السيارات ما يصل إلى 8 ملايين ميل في اليوم. في عام 2016 ، سافروا 2.5 مليار ميل افتراضي ، مقارنة بـ 3 ملايين ميل فقط سافروا بنماذج Google الأولية الحقيقية من Google على الطرق الحقيقية. والأهم من ذلك ، تركز الأميال الافتراضية على ما يسميه موظفو Waymo الطرق "المثيرة" حيث يمكن للسيارات تعلم شيء جديد. إنها ليست مجرد أميال مملة على الطريق السريع في طريق العمل.
المحاكاة هي جزء من العملية المعقدة التي طورتها Waymo. لقد ربطوا بشكل وثيق ملايين الأميال التي تقودها سياراتهم على DOP ببرنامج "التفتيش الهيكلي" الذي يقضونه في قاعدة زاموك السرية في الوادي المركزي.
حتى الآن ، لم تكشف Waymo عن نظامها للعالم. تظهر الأميال على الطرق العادية حيث تحتاج سياراتهم إلى ممارسة إضافية. يبنون طرقًا للتكوين الضروري في القلعة ، مما يسمح لهم بلعب آلاف السيناريوهات المختلفة على الفور. وفي أي من هذين النوعين من الفحوصات ، في العالم الحقيقي ، تجمع الآلات ما يكفي من البيانات من أجل إعادة الحالة تمامًا في شكل رقمي في أي وقت. في هذه المساحة الافتراضية ، يمكنك تحرير نفسك من قيود الحياة الواقعية وإنشاء الآلاف من الخيارات لأي سيناريو ، ثم جعل السيارة تمر بها جميعًا. لتحسين البرنامج الذي يقود السيارة ، يتم تنزيله مرة أخرى إلى السيارات ، والتي تقود بعد ذلك على الطرق لفترة أطول وأكثر تعقيدًا ، وتتكرر الدورة.
للوصول إلى القلعة ، من خليج سان فرانسيسكو ، تحتاج إلى الذهاب شرقاً ، ثم جنوباً على شارع 99 ، ثم على طول طريق سنترال فالي السريع ، متجهًا جنوبًا إلى فريسنو. حقول الذرة مجاورة لضواحي النمو. يختفي الأفق وراء الضباب الزراعي. تبلغ درجة حرارته 30 درجة أعلى من سان فرانسيسكو ، والسطح مسطح للغاية بحيث لا يمكن قياس منحدرات "بحر الأرض" ، كما سماها
جون ماكفي ، إلا بالليزر. أنت تتحرك بالقرب من بلدة إتووتر الصغيرة ، حيث كانت هناك قاعدة كاسل الجوية ، حيث خدم 6000 شخص برنامج B-52. الآن تقع على الحدود الشمالية لبلدة ميرسيد الصغيرة ، حيث وصلت البطالة في 2010s إلى 20 ٪ ، وحتى الآن نادرا ما تقل عن 10 ٪. 40 ٪ من السكان يتحدثون الإسبانية. نعبر السكة الحديدية وندخل أراضي القاعدة القديمة التي تبلغ مساحتها 650 هكتارًا ، والتي تضم الآن جميع أنواع الأشياء ، من قسم مراقبة الحياة البرية إلى سجن الدولة هذا.
لم يقودني المستكشف على الهاتف إلى عنوان محدد ، ولكن إلى إحداثيات GPS. نركب على طول سياج أخضر طويل وغير شفاف حتى تخبرك خرائط Google بأن الوقت قد حان للتوقف. لا شيء يشير إلى وجود أي بوابات. يبدو كل شيء وكأنه قسم آخر من السياج ، لكن ممثل مضيفي يبدو واثقًا. فجأة ، في الفجوة الآخذة في الاتساع بين البوابة والسياج ، يظهر حارس ويبدأ في فحص وثائقنا.
 السور
السورافترق الجدار ، وسرنا في الحرم الجامعي الصاخب. الشباب في السراويل القصيرة والقبعات يركضون جيئة وذهابا. يمكنك رؤية السيارات السكنية ، ومرائب القبة ، وفي موقف السيارات بالقرب من المبنى الرئيسي - السيارات الآلية. فيما يلي عدة أنواع من أجهزة الروبوت - طرازات لكزس التي يمكن أن يلتقي بها سكان الولايات المتحدة في عربات DOP و Prius و Chrysler Pacifica الجديدة.
من السهل التمييز بين الروبوتات. مرصعة بأجهزة استشعار. أكثر من غيرها ، يتم إصدار ماسحات ليزر (ليدار) على السطح. ولكن لدى باسيفيكا أيضًا أغطية صغيرة بحجم علبة الجعة تدور حول المرايا الجانبية. في الخلف ، تم تجهيزهم برادارات مشابهة لأذنين Shrek.
عندما تقوم بتشغيل مستشعرات الماكينة ، حتى إذا لم تتحرك ، فإن الليدار الدوار يصدر صوتًا غريبًا. شيء ما بين العواء والهمهمة ، هذا الصوت غير سار لأنه يبدو لي حداثة وأذني غير قادرة على تصفيته مع الأصوات الأخرى للسيارات التي نشأت بها.
يتم إيقاف سيارة أكثر إثارة للاهتمام في المبنى الرئيسي. تطبع عليها علامات X في جميع أنحاء الجسم بشريط أحمر ، وهي سيارة من المستوى الرابع. المستويات هي التسميات التي طورها مجتمع مهندسي السيارات والتي تصف درجة الاستقلال الذاتي للسيارة الآلية. تلك السيارات على الطرق التي نسمع عنها موجودة في المستوى الأول أو الثاني - أي أنها قادرة على السير على نظام تثبيت السرعة "الذكي" على الطريق السريع. لكن السيارة ذات Xs الحمراء هي وحش مختلف تمامًا. إنها ليست مستقلة تمامًا فقط ، فالشخص الذي بداخلها لن يكون قادرًا ببساطة على قيادتها - وبالتالي ، لا يريدون مزجها مع أجهزتهم الأخرى.
نحن نقود إلى موقف السيارات ، وفي كل مكان توجد علامات مشروع مانهاتن ، ومركز علمي ، وبدء التكنولوجيا في كل مكان. في المبنى الرئيسي ، سيارة متنقلة بحجم فصل دراسي ، أقابل القوة الدافعة لهذا المكان الرائع بأكمله. اسمها ستيف فيليجاس.
إنها ترتدي بلوزة بيضاء طويلة مزودة بقبة ، وجينز ممزق بشكل رهيب ، وأحذية رياضية محبوكة رمادية - كل شيء عصري للغاية ، كما تتابعها موظفة سابقة في متجر Azalea ، حيث انتقلت إلى Google. نشأت في إحدى ضواحي إيست باي على الجانب الآخر من التلال من بيركلي وحصلت على شهادة في الفن من جامعة كاليفورنيا في بيركلي قبل انضمامها إلى برنامج تطوير Robomobile 2011.
"هل كنت تقود سيارة؟" أسأل.
تقول: "أنا أقود طوال الوقت".
تمضي ساعات لا تحصى في الركوب على الطرق السريعة 101 و 280 ، وهي تسير من سان فرانسيسكو إلى ماونتن فيو. مثل جميع السائقين ، طورت شعورًا كيف تتصرف السيارات على الطريق السريع. وتبين أن هذه المعرفة مهمة جدًا لبرنامج تطوير سيارات الروبوت. لقد طوروا فكرة بديهية عما يمكن أن يكون صعبًا على الماكينات. تقول: "عند التحقق من البرامج المحدثة والحصول على منصب دائم في الفريق ، بدأت أفكر في المهام المعقدة الأخرى التي يمكن تعيينها للنظام".
لذا بدأ Villegas والعديد من المهندسين في الخروج وإنشاء سيناريوهات نادرة للمواقف التي تسمح لهم باختبار السلوك الجديد للآلات في بيئة خاضعة للرقابة. بدأوا في احتلال ساحة وقوف السيارات مقابل
المدرج الساحلي ، وتركيبها على مداخل شعبهم بحيث بقي فقط موظفو Google في ساحة الانتظار.
تقول: "بدأ كل شيء هناك". "كنت هناك والعديد من السائقين." توصلنا إلى مجموعة من الأفكار التي نريد اختبارها ، وحمّلنا كل ما نحتاجه في شاحنة صغيرة ، ودفعناها عبر ساحة الانتظار ، وقمنا بإجراء الفحوصات ".
هذه هي الطريقة التي نشأت بها الاختبارات المنظمة الأولى في برنامج تطوير الروبوت. اتضح أن أصعب شيء هو معالجة السيناريوهات غير المعقدة التي اخترعها الناس ، مثل "أنه إذا كان هناك زومبي على الطريق" ، ولكن ببساطة القيادة بثقة وموثوقية في المتغيرات التي لا نهاية لها من حركة المرور العادية.
بدأت Villegas في جمع الدعائم من كل شيء يمكنها الوصول إليه: العارضات والأقماع والنباتات الاصطناعية ولعب الأطفال وألواح التزلج والدراجات الثلاثية والدمى والكرات وجميع أنواع الأشياء. ذهب كل هذا إلى مجموعة من الدعائم (ونتيجة لذلك ، بدأوا في تخزينها في خيمة ، والآن - في القلعة ، في مستودع خاص).
 المستودع المطلوب
المستودع المطلوبولكن كانت هناك مشاكل. كان من الضروري أن تقود السيارة بشكل أسرع ، وتتعرف على إشارات المرور واللافتات. تداخلت الخطط باستمرار مع الحفلات الموسيقية التي أقيمت في المدرج. وتقول: "كانت هناك حالات مثل:" حسنًا ، ميتاليكا قادمة ، سيتعين علينا التخلص منها ".
كانوا بحاجة إلى قاعدة سرية. كانت القلعة فقط. وقعوا عقد إيجار وبدأوا في بناء مدينة الأحلام المزيفة. "لقد صنعنا على وجه التحديد الشوارع السكنية والطرق السريعة والطرق المسدودة ومواقف السيارات وكل ذلك ، حتى نحصل على مجموعة ممثلة من الأماكن المميزة التي يمكنك السفر حولها".
نذهب من المكتب الرئيسي لسيارتها. أعطتني خريطة عندما نذهب في رحلة ميدانية. تقول: "إنها مثل ديزني لاند حتى تتمكن من التنقل". تم تصميم الخريطة بعناية. في أحد الأركان توجد شارة على غرار فيغاس: "مرحبًا بكم في قلعة فيريتال بكاليفورنيا." تلتزم مناطق مختلفة من الحرم الجامعي بقواعد التسمية. في الطريق التي نقودها ، يتم تسمية كل طريق باسم السيارة الشهيرة (
DeLorean ،
Bullitt ) أو تكريمًا للسيارة من الحديقة الأولى القائمة على Prius ، والتي كانت موجودة في الأيام الأولى من البرنامج (Barbaro).
مررنا بالمباني الوردية ، الثكنات القديمة ، التي خضع أحدها للتجديد - موظفو Waymo يستريحون هناك عندما يفشلون في العودة إلى الخليج. بالإضافة إلى ذلك ، لا توجد مباني أخرى في منطقة الاختبار. إنها حقًا مدينة للسيارات الآلية: كل ما يهم هو إما على الرصيف نفسه أو على حدوده.
 "المدينة" في القلعة
"المدينة" في القلعةبالنسبة لشخص ما ، يبدو كل هذا وكأنه مستوى لعبة كمبيوتر بدون شخصيات. إنه لأمر غريب نوعًا ما أنك تشعر عندما تنتقل من الشوارع إلى الشوارع السكنية التي بها ممرات أسمنتية وتقاطعات في الضواحي لا تحتوي على مباني. تبدو لي بعض أجزاء الطريق بشكل دوري مألوفة بالنسبة لي.
نحن نقترب من دائرة مرور كبيرة ذات مسارين. في الوسط دائرة ذات سياج أبيض. يقول فيليجاس: "ظهر هذا الدوار هنا على وجه التحديد بعد أن اختبرنا الدوار متعدد المسارات في أوستن بولاية تكساس". - في البداية ، كان لدينا دوار واحد فقط ، وقررنا: "حسنًا ، حسنًا ، لقد انتهينا من هذه المرحلة". ثم تعثرنا على شريط متعدد ، وتعجبنا: "واو ، حصان بلون مختلف! شكرا تكساس ". لذلك ، خلقنا هذا الجمال في أنفسنا ".

نتوقف ، ويفكر Villegas في إضافة واحدة جديدة: ممران للسيارات وممر واحد للدراجات يمر عبر منطقة وقوف السيارات الموازية المحاذية للحديقة. “أردت حقًا إنشاء شارع به مواقف متوازية هنا. غالبًا ما يوجد هذا في الضواحي. الجوز كريك. ماونتن فيو. تقول بالو ألتو. - خروج الناس من المتاجر أو من ساحة انتظار السيارات. الناس يمشون بين السيارات ، يعبرون الطريق بأيديهم. " كان الشريط جزءًا من ذاكرتها ، تجسد في الأسفلت والخرسانة ، والتي ستتحول بعد ذلك إلى شكل أكثر تجريدًا ، لتحسين قدرة الروبوت على معالجة التضاريس المألوفة.
تعيدني إلى المكتب الرئيسي ، ونصعد إلى الشاحنة الآلية ، إحدى سيارات كرايسلر باسيفيكا. سائقنا هو براندون كين. سيراقب مساعده في مقعد الراكب سلوك السيارة على جهاز كمبيوتر محمول باستخدام برنامج XView.
تعمل معهم مجموعة من المساعدين ، الذين يسمونهم "الثعالب" - وقد نما اللقب من كلمة "اصطناعي" [ثعلب - ثعلب ، زائف - اصطناعي / تقريبًا. ترجم.]. يقودون السيارات ، ويخلقون حركة المرور ، ويلعبون المشاة ، وركوب الدراجات ، ويحملون علامات التوقف. هؤلاء هم الممثلون الذين جمهورهم هو السيارة.
فحصنا الأول هو مرور بسيط وقطع ، ولكن بسرعة عالية. في هذه الحالة ، تكون 70 كم / ساعة. نقود مباشرة على طول الطريق الواسع الذي أطلقوا عليه أوتوبان.
عندما يقطعنا الثعلب ، تفرم آلة Waymo ويتحقق الفريق من مؤشر رئيسي في هذه الحالة: الكبح. إنهم يحاولون خلق مواقف تحتاج فيها السيارة إلى الفرامل بشكل حاد. كيف حاد؟ في مكان ما بين "الجحيم ، ليس لدي وقت لإشارة ضوئية" و "تعرقت بحدة ، وانطلق الهاتف من المقعد".
سأقول شيئًا غريبًا: هذه ليست رحلتي الأولى إلى سيارة روبوتية. في الماضي ، كنت أقود مرتين في سيارتين آليتين مختلفتين: المرة الأولى على سيارة لكزس الرياضية متعددة الأغراض التي قادتني على طول شوارع ماونتن فيو ، والثانية على سيارة صغيرة من Google Firefly ركبت على سطح مبنى Google. كانت هذه رحلات غير ملحوظة ، والتي ، في الواقع ، يطمح الجميع.
الآن كل شيء مختلف. سيارتان سريعتا الحركة ، إحداها يجب أن تقطعنا بشكل حاد.
حان الوقت للبدء. يبدأ كين السيارة ، وبعد صفير تقول السيارة: "تلقائي". سيارة أخرى تقترب منا وتقطعنا كسائق بورش ، تسعى جاهدة لتكون أول من يقود إلى الخروج. نحن الفرامل بقوة وسرعة وسلاسة. أنا معجب.
يتحققون من بيانات الكبح ويدركون أننا لم نقم بالفرملة بقوة كافية. لا بد لي من تكرار ذلك. ومرة أخرى ومرة أخرى ... السيارة الثانية تقطعنا من زوايا مختلفة ، بطريقة مختلفة. يسمونه "الحصول على تغطية".
 إعادة البناء بسرعة عالية. واحدة من السيارات مستقلة.
إعادة البناء بسرعة عالية. واحدة من السيارات مستقلة.نحن نقوم بثلاثة فحوصات أخرى - إعادة البناء بسرعة عالية ، والاجتماع بسيارة تقود للخلف من زقاق على بعد ثلاث بنايات ، وتوقف سلس على مرمى كرة السلة التي خرجت على الطريق. كل مناورة مثيرة للإعجاب بطريقتها الخاصة ، لكنني أتذكر الاختبار مع قطع أكثر من غيرها.
عندما نذهب إلى إعادة التشغيل ، ينتقل كين إلى المقعد. "هل شاهدت
حافة المحيط الهادئ ؟" يسألني. - فيلم Guillermo del Toro ، حيث يقوم الأشخاص بمزامنة الإجراءات مع الروبوتات العملاقة لمحاربة الوحوش. أحاول مزامنة الإجراءات مع robomobile. لدينا بعض الأفكار المشتركة ".
أطلب منه أن يشرح ما يعنيه. يقول: "أحاول التكيف مع اختلاف الوزن بسبب الأشخاص الموجودين في السيارة". - أقضي الكثير من الوقت في السيارة ويمكنني أن أشعر بما تفعله - يبدو غريباً ، نعم - بمؤخرتي. أنا أفهم نوعًا ما ما تريد القيام به ".
يقع مقر شركة Google المريح بعيدًا عن ضباب وحرارة القلعة في ماونتن فيو. جئت إليهم للقاء المهندسين العاملين داخل X ، والذين قد يُعرفون بك باسم Google X. يشارك هذا القسم من الشركة في مشاريع بحثية طويلة الأمد عالية المخاطر. في عام 2015 ، عندما قامت Google بإعادة هيكلة تكتل Alphabet وتنظيمه ، أسقط X Google في العنوان (يُطلق على موقع الويب الخاص بهم X.company). بعد عام من ذلك ، قررت شركة X / Alphabet فصل برنامج إنشاء أجهزة الروبوت إلى شركة منفصلة ، كما حدث بالفعل مع مشاريع أخرى مختلفة ، وظهرت Waymo. يبدو أنه ابن عم جوجل.
لذلك ، على الرغم من أن مكاتب Waymo لا تزال داخل "السفينة الناقلة" ، فإن هاتين النقرتين تنفصلان ببطء بالفعل ، ويجلس جميع موظفي Waymo بشكل منفصل.
مبنى X / Waymo كبير وخفيف. النماذج الأولية لطائرة Project Wing في كل مكان. أرى آلة كاتبة Firefly صغيرة صنعتها الشركة. قال لي فيليجاس في القلعة: "هناك شيء جميل حول ما فعلته بنفسك". "ولكن لم يكن هناك تكييف هواء فيها ، لذلك لا أفتقدهم."
ليس بعيدًا عن الكافتيريا في زاوية أحد أجنحة المبنى هو مجموعة محاكاة Waymo. يبدو أن الجميع لديهم Carcraft و XView على الشاشات. عدد كبير بشكل ملحوظ من المضلعات على خلفية داكنة. هؤلاء الأشخاص هم الذين يبتكرون عوالم افتراضية تقودها سيارات Waymo.
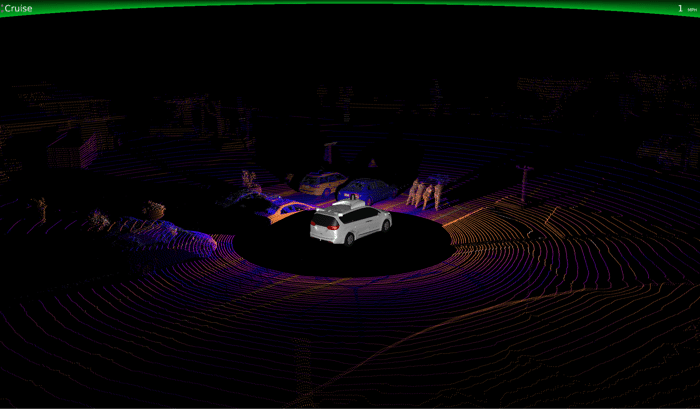 ما رأى ماسح ليزر وايمو عندما كان أربعة يدفعون سيارة
ما رأى ماسح ليزر وايمو عندما كان أربعة يدفعون سيارةأنا في انتظار جيمس ستوت ، مبتكر شركة Carcraft. ليست لديه الفرصة للتحدث علنا عن مشروعه ، لذلك يندلع حماسه. كاركرافت هو من بنات أفكاره.
يقول: "كنت أبحث في الوظائف الشاغرة ورأيت أن الفريق الذي يعمل على إنشاء أجهزة الروبوت كان يوظف الموظفين". "لا أصدق أنهم نشروا للتو وظيفة". انضم إلى الفريق وشرع على الفور في إنشاء أداة ، بفضلها يتم السفر اليوم 8 ملايين ميل افتراضي.
في البداية ، تم استخدام الأداة بشكل أساسي لمراقبة ما ستفعله سياراتهم في المواقف الصعبة التي يتحكم فيها السائقون المباشرون في السيارة. من هذه اللحظات ، بدأوا في إنشاء نصوص. يقول ستاوت: "أصبح من الواضح بسرعة أن هذه كانت أداة مفيدة للغاية ، وأنه يمكن إنشاء الكثير على أساسها". نمت احتمالات Carcraft بحيث أصبحت الآن تناسب مدن بأكملها ، ونما عدد السيارات إلى حديقة افتراضية ضخمة.يقدم لي ستاوت إلينا كولاروف ، رئيسة قسم خدمات البرمجة النصية. أمامها مراقبون. على اليمين يظهر Xview ما تراه الآلة. تستخدم الآلة الكاميرات والرادار والليدار لتحديد الأشياء في مجال الرؤية - حيث تقدمها في شكل أشكال سلكية صغيرة.تظهر الخطوط الخضراء من النماذج وتبين الطرق الممكنة التي يمكن من خلالها للأجسام أن تتحرك. يوجد أدناه جزء من الصورة ، يظهر أن كاميرات السيارات العادية يتم تصويرها. يمكن لـ Kolyarova تشغيل عرض البيانات المستلمة من lidar - يتم عرضها بنقاط برتقالية وأرجوانية.نحن نتطلع إلى إعادة إنتاج الحالة الحقيقية لإعادة الترتيب في خط واحد في حركة دائرية في القلعة. تحولت Kolyarova إلى جهاز المحاكاة. كل شيء يبدو متشابهًا ، لكن هذا ليس سجلًا للحدث ، ولكنه موقف جديد يجب على الآلة التعامل معه. والفرق الوحيد هو أنه يوجد في أعلى الشاشة "محاكاة" نقش بحروف حمراء كبيرة. يقول ستاوت إنه اضطر إلى إضافته لأن الناس استمروا في الخلط بين المحاكاة والواقع طوال الوقت. كيف تبدو الحركة الدائرية في القلعة في XViewتحميل حالة مختلفة. كان في فينيكس. تقوم Kolyarova بتكبير الصورة لإظهار نموذجها للمدينة. بالنسبة للنموذج بأكمله ، أشاروا ، "أين توجد جميع الممرات ، التي تتحول فيها الممرات ، أين توجد علامات التوقف ، أين إشارات المرور ، الأرصفة ، أين مراكز الممرات - كل ما تحتاج إلى معرفته ،" يقول Stout.
كيف تبدو الحركة الدائرية في القلعة في XViewتحميل حالة مختلفة. كان في فينيكس. تقوم Kolyarova بتكبير الصورة لإظهار نموذجها للمدينة. بالنسبة للنموذج بأكمله ، أشاروا ، "أين توجد جميع الممرات ، التي تتحول فيها الممرات ، أين توجد علامات التوقف ، أين إشارات المرور ، الأرصفة ، أين مراكز الممرات - كل ما تحتاج إلى معرفته ،" يقول Stout.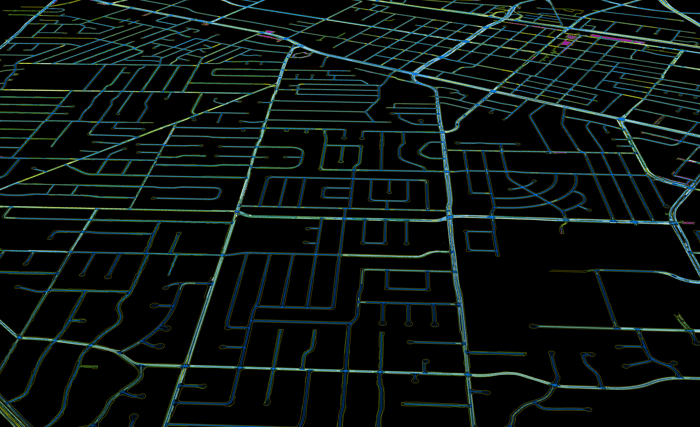 الآن نحن بصدد زيادة تقاطع رباعي في مكان ما بالقرب من فينيكس. تبدأ Kolyarova في وضع السيارات الاصطناعية والمشاة وراكبي الدراجات عليها.
الآن نحن بصدد زيادة تقاطع رباعي في مكان ما بالقرب من فينيكس. تبدأ Kolyarova في وضع السيارات الاصطناعية والمشاة وراكبي الدراجات عليها. خلق حالة مصطنعة في Carcraftبالضغط على مفتاح التشغيل السريع ، تبدأ الكائنات في التحرك. تتصرف السيارات مثل السيارات ، أو تقود في ممرها أو تستدير. يتصرف راكبو الدراجات وفقًا لذلك. تم أخذ منطقهم من البيانات التي تم الحصول عليها من مليون ميل توالت على DOP. وكل هذا مبني على خريطة فائقة التفصيل للعالم ونماذج مادية لمشاركين مختلفين في الموقف.
خلق حالة مصطنعة في Carcraftبالضغط على مفتاح التشغيل السريع ، تبدأ الكائنات في التحرك. تتصرف السيارات مثل السيارات ، أو تقود في ممرها أو تستدير. يتصرف راكبو الدراجات وفقًا لذلك. تم أخذ منطقهم من البيانات التي تم الحصول عليها من مليون ميل توالت على DOP. وكل هذا مبني على خريطة فائقة التفصيل للعالم ونماذج مادية لمشاركين مختلفين في الموقف. ليس من المستغرب أن أصعب شيء هو محاكاة سلوك الآخرين. "أنا لا أقلق بشأن قيادتك ، أنا قلق بشأن أي شخص آخر على الطريق.""سياراتنا ترى العالم ، تفهم العالم. إنهم يفهمون نوايا جميع المشاركين المتحركين في البيئة - السيارات والمشاة وراكبي الدراجات وراكبي الدراجات النارية. لا يكفي تتبع شيء في الفضاء. يقول دميتري دولجوف ، نائب رئيس وايمو للتطوير: "عليك أن تفهم ما يفعله". - هذه مهمة رئيسية في إنشاء سيارة روبوتية ماهرة وآمنة. "إن مثل هذه المحاكاة ، مثل هذا الفهم لسلوك المشاركين الآخرين في الحركة ، يشبه إلى حد كبير نمذجة سلوكهم في المحاكاة."هناك اختلاف رئيسي واحد: في العالم الحقيقي ، ستحتاج إلى بيانات جديدة في الوقت الحقيقي للمعالجة بسرعة وتحويل النص البرمجي إلى جهاز مناسب للآلة ، ثم التنقل فيه. ولكن الآن ، بعد عدة سنوات من العمل في هذا المشروع ، فإنهم واثقون من قدرتهم على القيام بذلك ، لأنهم "أجروا مجموعة من الفحوصات تبين أننا قادرون على التعرف على عدد كبير من خيارات المشاة" ، كما يقول ستاوت.لذلك في معظم الحالات ، يتخطون ببساطة مرحلة التعرف على الأشياء. بدلاً من تغذية البيانات الأولية للسيارة التي يجب أن تتعرف عليها كمشاة ، فإنهم ببساطة يخبرونها: هناك مشاة.عند التقاطع ، تعقد Kolyarova حياة السيارة. تضغط على V ، وهو مفتاح التشغيل السريع للسيارة ، ويظهر كائن جديد في Carcraft. ثم ، باستخدام الماوس في القائمة اليمنى ، تختار المفضلة من بين أنواع السيارات: bird_squirrel.يمكن إجبار كائنات مختلفة على التصرف وفقًا لمنطق تم تكوينه مسبقًا في Waymo أو منطق مبرمج في Carcraft بحيث تتحرك بطريقة محددة جدًا - وهذا ضروري لاختبار أنواع مختلفة من السلوك. يقول ستاوت: "هناك نطاق واسع بين التحكم الكامل في الموقف والترتيب البسيط للأشياء في المشهد ، وبعد ذلك يمكنك ببساطة تشغيلها كلها".نظرًا لتكوين أساس الموقف ، يمكنك البدء في التحقق من جميع الخيارات المهمة الواردة فيه. لنفترض أنك تريد التحقق عند تقاطع واحد من التسلسل المختلف لوصول السيارات والمشاة وراكبي الدراجات ، والوقت المختلف لوقوفهم ، وسرعتهم وأي شيء آخر. ثم يمكنك ببساطة تعيين فترات زمنية معقولة للمعلمات المقابلة وفقدان جميع مجموعات هذا الموقف.يسمونها ضبابية ، وفي هذه الحالة ، تم إنشاء 800 حالة تلقائيًا عند تقاطعنا. والنتيجة هي رسم تخطيطي جميل من الدانتيل - ويمكن لجميع المبرمجين التحقق منه ومعرفة كيف تؤثر مجموعات مختلفة من المتغيرات على المسار الذي اختاره الروبوت.
ليس من المستغرب أن أصعب شيء هو محاكاة سلوك الآخرين. "أنا لا أقلق بشأن قيادتك ، أنا قلق بشأن أي شخص آخر على الطريق.""سياراتنا ترى العالم ، تفهم العالم. إنهم يفهمون نوايا جميع المشاركين المتحركين في البيئة - السيارات والمشاة وراكبي الدراجات وراكبي الدراجات النارية. لا يكفي تتبع شيء في الفضاء. يقول دميتري دولجوف ، نائب رئيس وايمو للتطوير: "عليك أن تفهم ما يفعله". - هذه مهمة رئيسية في إنشاء سيارة روبوتية ماهرة وآمنة. "إن مثل هذه المحاكاة ، مثل هذا الفهم لسلوك المشاركين الآخرين في الحركة ، يشبه إلى حد كبير نمذجة سلوكهم في المحاكاة."هناك اختلاف رئيسي واحد: في العالم الحقيقي ، ستحتاج إلى بيانات جديدة في الوقت الحقيقي للمعالجة بسرعة وتحويل النص البرمجي إلى جهاز مناسب للآلة ، ثم التنقل فيه. ولكن الآن ، بعد عدة سنوات من العمل في هذا المشروع ، فإنهم واثقون من قدرتهم على القيام بذلك ، لأنهم "أجروا مجموعة من الفحوصات تبين أننا قادرون على التعرف على عدد كبير من خيارات المشاة" ، كما يقول ستاوت.لذلك في معظم الحالات ، يتخطون ببساطة مرحلة التعرف على الأشياء. بدلاً من تغذية البيانات الأولية للسيارة التي يجب أن تتعرف عليها كمشاة ، فإنهم ببساطة يخبرونها: هناك مشاة.عند التقاطع ، تعقد Kolyarova حياة السيارة. تضغط على V ، وهو مفتاح التشغيل السريع للسيارة ، ويظهر كائن جديد في Carcraft. ثم ، باستخدام الماوس في القائمة اليمنى ، تختار المفضلة من بين أنواع السيارات: bird_squirrel.يمكن إجبار كائنات مختلفة على التصرف وفقًا لمنطق تم تكوينه مسبقًا في Waymo أو منطق مبرمج في Carcraft بحيث تتحرك بطريقة محددة جدًا - وهذا ضروري لاختبار أنواع مختلفة من السلوك. يقول ستاوت: "هناك نطاق واسع بين التحكم الكامل في الموقف والترتيب البسيط للأشياء في المشهد ، وبعد ذلك يمكنك ببساطة تشغيلها كلها".نظرًا لتكوين أساس الموقف ، يمكنك البدء في التحقق من جميع الخيارات المهمة الواردة فيه. لنفترض أنك تريد التحقق عند تقاطع واحد من التسلسل المختلف لوصول السيارات والمشاة وراكبي الدراجات ، والوقت المختلف لوقوفهم ، وسرعتهم وأي شيء آخر. ثم يمكنك ببساطة تعيين فترات زمنية معقولة للمعلمات المقابلة وفقدان جميع مجموعات هذا الموقف.يسمونها ضبابية ، وفي هذه الحالة ، تم إنشاء 800 حالة تلقائيًا عند تقاطعنا. والنتيجة هي رسم تخطيطي جميل من الدانتيل - ويمكن لجميع المبرمجين التحقق منه ومعرفة كيف تؤثر مجموعات مختلفة من المتغيرات على المسار الذي اختاره الروبوت. مخطط انتخابييكمن التحدي في تحليل كل هذه الخيارات والمحاكاة للعثور على بيانات مثيرة للاهتمام يمكن أن تساعد المبرمجين على تحسين برنامج القيادة الخاص بهم. قد تكون الخطوة الأولى: هل علقت السيارة؟ إذا كان الأمر كذلك ، فإن هذا الوضع يصبح مثيرًا للاهتمام للعمل معه.تظهر الرسوم المتحركة أدناه مثل هذا الموقف. التقاطع المعقد الموجود في الواقع في ماونتن فيو. عند الالتفاف يسارًا ، رصدت السيارة راكب دراجة ظهر ، ولهذا توقفت على الطريق. أخذ المبرمجون هذه الفئة من المشكلات وأعادوا تصميم البرنامج بحيث يستجيب بشكل صحيح للموقف. يظهر الفيديو الوضع الحقيقي ، ومن ثم محاكاة له. حيث تتباعد ، يمكنك أن ترى أن الآلة المحاكية تستمر في التحرك ، ثم يظهر مربع منقط مع نقش "shadow_vehicle_pose". يظهر المربع المتقطع ما حدث في الواقع. بالنسبة لموظفي Waymo ، فإن هذا هو أوضح تصور للتقدم.
مخطط انتخابييكمن التحدي في تحليل كل هذه الخيارات والمحاكاة للعثور على بيانات مثيرة للاهتمام يمكن أن تساعد المبرمجين على تحسين برنامج القيادة الخاص بهم. قد تكون الخطوة الأولى: هل علقت السيارة؟ إذا كان الأمر كذلك ، فإن هذا الوضع يصبح مثيرًا للاهتمام للعمل معه.تظهر الرسوم المتحركة أدناه مثل هذا الموقف. التقاطع المعقد الموجود في الواقع في ماونتن فيو. عند الالتفاف يسارًا ، رصدت السيارة راكب دراجة ظهر ، ولهذا توقفت على الطريق. أخذ المبرمجون هذه الفئة من المشكلات وأعادوا تصميم البرنامج بحيث يستجيب بشكل صحيح للموقف. يظهر الفيديو الوضع الحقيقي ، ومن ثم محاكاة له. حيث تتباعد ، يمكنك أن ترى أن الآلة المحاكية تستمر في التحرك ، ثم يظهر مربع منقط مع نقش "shadow_vehicle_pose". يظهر المربع المتقطع ما حدث في الواقع. بالنسبة لموظفي Waymo ، فإن هذا هو أوضح تصور للتقدم. لكنهم بحاجة إلى البحث ليس فقط عن تلك الحالات التي تكون فيها السيارة عالقة. يمكنهم البحث عن المواقف التي كان فيها الوقت الذي يقضيه في الحل طويلاً جدًا ، أو كان الكبح بطيئًا جدًا. كل ما يقوم المبرمجون بضبطه ودراسته ، يحاكيونه من أجل العثور على المشاكل.حدد ستاوت ورئيس قسم برمجيات الديون تحديدًا أن المحاكاة لها ثلاث خصائص رئيسية. أولاً ، في المحاكاة ، يمكنك القيادة لأميال أكثر بكثير مما قد يكون ممكنًا مع حديقة فعلية ؛ والخبرة جيدة. ثانيًا ، تركز هذه الأميال على التفاعلات الشيقة والمعقدة ، وليس مجرد أميال مملة. ثالثًا ، يمكن أن تسير دورات تطوير البرامج بشكل أسرع.قال لي دولجوف: "إن دورة التكرار مهمة للغاية بالنسبة لنا ، والعمل الذي تم على المحاكاة يسمح لنا بضغطه بشكل كبير". "دورة تستغرق أسابيع للعمل معنا للمرة الأولى ، وهي الآن تمر في دقائق".ماذا عن بقع النفط على الطرق؟ انفجار الإطارات ، والطيور الغريبة ، والثقوب بحجم القشرة ، والجنون العام للسائقين. هل يتظاهرون بأنهم كذلك؟ كان الدين واثقا. يقول أنه يمكنهم فعل ذلك ، ولكن "كم تحتاج لزيادة دقة المحاكي؟"لا تتمثل فوائد العوالم الافتراضية في Carcraft في أنها جميلة ، ومثالية ، وصور واقعية في العالم الحقيقي. فائدتها هي أنها تعكس العالم الحقيقي في الجوانب المهمة بالنسبة إلى الأجهزة الآلية وتسمح لها بقيادة مليارات الأميال أكثر مما تسمح به الفحوصات المادية. لا يتخذ برنامج الجهاز المضيف قرارات ، في عالم مشابه للعالم الحقيقي - بالنسبة له كل شيء كما لو كان يتخذ قرارات في العالم الحقيقي.ويعمل هذا النظام. تتطلب وزارة النقل في كاليفورنيا من الشركات الإبلاغ عن عدد سياراتها الآلية التي قطعت أميالًا في السنة ، وعدد المرات التي يتعين على السائقين التحكم فيها. لم يكن وايمو يقود فقط ثلاثة أميال من حيث الحجم أكثر من أي شخص آخر ، ولكن عدد حالات نقل السيطرة ينخفض بسرعة.قامت Waymo بتدوير 635،868 ميلًا مستقلاً من ديسمبر 2015 إلى نوفمبر 2016. في هذه الأميال ، حدثت عمليات نقل التحكم 124 مرة ، في المتوسط مرة واحدة كل 5000 ميل ، أو 0.2 تحويلات لكل 1000 ميل. في العام السابق ، وصلوا إلى 424331 ميلًا مستقلاً ، وكان لديهم 272 نوبة ، في المتوسط كل 890 ميلًا ، أو 0.8 نوبة لكل 1000 ميل.الجميع ، بالطبع ، يقولون أنه لا يمكن مقارنة هذه الأرقام ، لكن لنكن واقعيين: هذه هي أفضل المؤشرات لكاليفورنيا. وبلغ إجمالي الباقي قوة 20 ألف ميل.لا يفاجئ نهج Waymo خبراء الأطراف الثالثة. يقول كريس ديكسون ، الرأسمالي الاستثماري في Andreessen Horowitz ، الذي استثمر في شركة محاكاة الشركة Improbable ، وهي شركة محاكاة: "الآن يمكنك قياس مدى تعقيد الفريق الذي يعمل على الاستقلالية - سواء كانت طائرة بدون طيار أو سيارة - من خلال مدى جديتهم في المحاكاة". "ويومو في القمة ، هم الأكثر تعقيدا."سألت رئيس الابتكار في Allstate Insurance Sunil Chintakindi عن Waymo. وقال: "بدون بنية تحتية موثوقة للمحاكاة ، لا يمكنك إنشاء آلات بأعلى مستويات الاستقلالية". "لن أتحدث حتى مع شخص يفكر بطريقة أخرى."يختار باحثون آخرون مسارات مماثلة. Huey Peng مدير Mcity ، مختبر النقل المستقل والموحد بجامعة ميشيغان. يقول Peng أن أي نظام يعمل على السيارات الآلية سيكون "مزيجًا من محاكاة بنسبة 99٪ وفحوصات هيكلية مصممة بعناية وبعض عمليات الفحص على الطرق".مع الطلاب الخريجين ، اقترحوا نظامًا للجمع بين الأميال الحقيقية المقطوعة والمحاكاة لتسريع الشيكات بشكل كبير. النظام يشبه إلى حد ما تطبيق Waymo. يقول بينج: "نقترح إزالة جميع مراحل القيادة المملّة وتركها مثيرة للاهتمام". "هذا سيسمح لك بالتسارع مئات المرات: ألف ميل يتحول إلى مليون."إن نطاق وتنظيم ونشاط مشروع Waymo مدهش. لقد وصفت الفحوصات الهيكلية التي أجرتها Google و Pengu ، بما في ذلك 20000 موقف دخلت في المحاكاة من الفحوصات الهيكلية التي أجراها الفريق في القلعة. في البداية لم يسمعني وبدأ يقول أن "مواقف 2000 هذه شخصية مؤثرة". صححته: "لقد كان 20 ألف محاكاة". كان صامتاً. وقال: "20000". "هذا مثير للإعجاب."في الواقع ، تمثل كل هذه الحالات البالغ عددها 20000 جزءًا صغيرًا من العدد الإجمالي للحالات التي تم التحقق منها بواسطة Waymo. هذه ليست سوى نتائج معالجة الشيكات الهيكلية. لديهم المزيد من المواقف المأخوذة من القيادة على الطرق الحقيقية وفقط من رؤوسهم.قال بنغ: "إنهم يحسنون الأداء". "إنهم يتفوقون كثيرًا على أي شخص آخر في تطوير المستوى الرابع" ، باستخدام تقليل المصطلحات لسيارة مستقلة بالكامل.وعبر بنغ عن موقف صانعي السيارات التقليديين. قال إنهم يحاولون تحقيق شيء مختلف تمامًا. إنهم لا يهدفون إلى الاستقلال الذاتي الكامل ، لكنهم يحاولون إضافة التقنيات التي تساعد على القيادة ، و "كسب بعض المال" ، ثم المضي قدمًا نحو الاستقلال الذاتي الكامل. لا يمكن مقارنة Waymo بالموارد وحرية الشركات لوضع جهاز تحديد مدى ليزر 70،000 دولار على جهاز مع شركة تصنيع مثل Chevy ، التي لا يجب أن تكلف سياراتها أكثر من 40،000 دولار ليتم بيعها في السوق."تقول جنرال موتورز وفورد وتويوتا والباقي:" دعني أقوم بتقليل التصادمات والإصابات وزيادة السلامة للمستهلك الشامل. " يقول بنغ إن هدفهم مختلف تمامًا. "نحن بحاجة إلى التفكير في ملايين السيارات ، وليس فقط بضعة آلاف".وواجهت وايمو عقبات في السباق من أجل الاستقلال الذاتي الكامل أكثر مما اعتادت عليه ، على سبيل المثال ، تيسلا. كريس جيردي مديرة مركز ستانفورد لأبحاث السيارات. قبل ثمانية عشر شهرًا أخبر زميلي أن Waymo "لديه فهم أفضل بكثير لعمق المشاكل وكم اقتربنا من حلها". عندما سألته الأسبوع الماضي عما إذا كان لا يزال يعتقد ذلك ، قال "الكثير تغير. "يقول: "عرضت شركات صناعة السيارات مثل فورد وجنرال موتورز سياراتها وبنت مجموعات بيانات الطرق الخاصة بهم". - جمع تسلا كمية كبيرة من البيانات من تطوير الطيار الآلي ، ودرس كيف يتصرف النظام بدقة في الظروف التي يجد فيها العملاء أنفسهم. إن قدرتهم على اختبار الخوارزميات بهدوء وقاعدة آلاتهم المتنامية بسرعة تمثل أرضية اختبار مذهلة. "يقول جيردي إنه في عالم المحاكاة ، رأى العديد من المنافسين ببرامج جادة إلى حد ما. "أنا متأكد من أن هناك الكثير من إمكانيات المحاكاة ، لكني رأيت عددًا من الأمثلة الجيدة جدًا. لم يعد Waymo يبدو فريدًا جدًا. لقد كان لديهم بالفعل إعاقة ، ولكن اليوم هناك العديد من المجموعات التي تعاني من نهج مماثلة. لذا فإن السؤال الآن هو من سيفعل ذلك بشكل أفضل ".هذا ليس مجرد نوع من إظهار عملية الشبكة العصبية التي تبدو وكأنها دماغ. هذه قفزة كبيرة إلى الأمام في تطوير الذكاء الاصطناعي ، حتى بالنسبة لشركة Alphabet ، المعروفة بسياسات الذكاء الاصطناعي العدوانية. هذه ليست صور Google ، حيث الخطأ لا يساوي شيئًا. هذا هو النظام الذي سيعيش ويتفاعل بشكل مستقل تمامًا مع عالم الناس. سوف تفهم قواعدنا ، وتوصل رغباتها ، وسوف تصبح واضحة لأعيننا وعقولنا.يبدو أن Waymo قد ابتعدت قليلاً عن العمل مع ركوب الخيل كمهارة فنية محددة ، وتنتقل إلى العمل معها كشكل من أشكال النشاط الاجتماعي البشري. ماذا يعني القيادة "بشكل طبيعي" وليس "بشكل قانوني" فقط؟ كيف تعلم هذا الذكاء الاصطناعي؟اتضح أنه لإنشاء مثل هذا الذكاء الاصطناعي ، لا تحتاج فقط إلى كمية كبيرة من البيانات وفن المبرمجين. هذه شروط ضرورية لكنها غير كافية. جزء من هذا ضروري حتى يتزامن الناس مع السيارات ويفهمون العالم كما هم. يفهم السائقون في القلعة ما يعنيه أن يكون أحد هذه الآلات ، لرؤية واتخاذ القرارات كما هي. ربما يعمل هذا في كلا الاتجاهين - فكلما كان الناس يفهمون الآلات بشكل أفضل ، كانت الآلات الأفضل تفهم الناس.تصبح ذاكرة الدوار في أوستن جزءًا من القلعة ، وتصبح مجموعة بيانات السيارة الآلية الوضع بالنسبة لـ Carcraft وتصبح شبكة المحاكاة تصبح البرنامج الجديد الذي يعود أخيرًا إلى سيارة الروبوت المادي التي تذهب إلى هذا الدوار في تكساس.حتى داخل التجريد المضلع للمحاكاة التي تستخدمها منظمة العفو الدولية للتعرف على العالم ، هناك آثار الأحلام البشرية ، وأجزاء من الذكريات ، ومشاعر السائقين. هذه المكونات ليست أخطاء وليست بقع تحتاج إلى التنظيف ، ولكنها الأجزاء الضرورية من النظام الذي يمكن أن يحدث ثورة في النقل ، في المدن ، والجحيم ، في كل مكان تقريبًا.
لكنهم بحاجة إلى البحث ليس فقط عن تلك الحالات التي تكون فيها السيارة عالقة. يمكنهم البحث عن المواقف التي كان فيها الوقت الذي يقضيه في الحل طويلاً جدًا ، أو كان الكبح بطيئًا جدًا. كل ما يقوم المبرمجون بضبطه ودراسته ، يحاكيونه من أجل العثور على المشاكل.حدد ستاوت ورئيس قسم برمجيات الديون تحديدًا أن المحاكاة لها ثلاث خصائص رئيسية. أولاً ، في المحاكاة ، يمكنك القيادة لأميال أكثر بكثير مما قد يكون ممكنًا مع حديقة فعلية ؛ والخبرة جيدة. ثانيًا ، تركز هذه الأميال على التفاعلات الشيقة والمعقدة ، وليس مجرد أميال مملة. ثالثًا ، يمكن أن تسير دورات تطوير البرامج بشكل أسرع.قال لي دولجوف: "إن دورة التكرار مهمة للغاية بالنسبة لنا ، والعمل الذي تم على المحاكاة يسمح لنا بضغطه بشكل كبير". "دورة تستغرق أسابيع للعمل معنا للمرة الأولى ، وهي الآن تمر في دقائق".ماذا عن بقع النفط على الطرق؟ انفجار الإطارات ، والطيور الغريبة ، والثقوب بحجم القشرة ، والجنون العام للسائقين. هل يتظاهرون بأنهم كذلك؟ كان الدين واثقا. يقول أنه يمكنهم فعل ذلك ، ولكن "كم تحتاج لزيادة دقة المحاكي؟"لا تتمثل فوائد العوالم الافتراضية في Carcraft في أنها جميلة ، ومثالية ، وصور واقعية في العالم الحقيقي. فائدتها هي أنها تعكس العالم الحقيقي في الجوانب المهمة بالنسبة إلى الأجهزة الآلية وتسمح لها بقيادة مليارات الأميال أكثر مما تسمح به الفحوصات المادية. لا يتخذ برنامج الجهاز المضيف قرارات ، في عالم مشابه للعالم الحقيقي - بالنسبة له كل شيء كما لو كان يتخذ قرارات في العالم الحقيقي.ويعمل هذا النظام. تتطلب وزارة النقل في كاليفورنيا من الشركات الإبلاغ عن عدد سياراتها الآلية التي قطعت أميالًا في السنة ، وعدد المرات التي يتعين على السائقين التحكم فيها. لم يكن وايمو يقود فقط ثلاثة أميال من حيث الحجم أكثر من أي شخص آخر ، ولكن عدد حالات نقل السيطرة ينخفض بسرعة.قامت Waymo بتدوير 635،868 ميلًا مستقلاً من ديسمبر 2015 إلى نوفمبر 2016. في هذه الأميال ، حدثت عمليات نقل التحكم 124 مرة ، في المتوسط مرة واحدة كل 5000 ميل ، أو 0.2 تحويلات لكل 1000 ميل. في العام السابق ، وصلوا إلى 424331 ميلًا مستقلاً ، وكان لديهم 272 نوبة ، في المتوسط كل 890 ميلًا ، أو 0.8 نوبة لكل 1000 ميل.الجميع ، بالطبع ، يقولون أنه لا يمكن مقارنة هذه الأرقام ، لكن لنكن واقعيين: هذه هي أفضل المؤشرات لكاليفورنيا. وبلغ إجمالي الباقي قوة 20 ألف ميل.لا يفاجئ نهج Waymo خبراء الأطراف الثالثة. يقول كريس ديكسون ، الرأسمالي الاستثماري في Andreessen Horowitz ، الذي استثمر في شركة محاكاة الشركة Improbable ، وهي شركة محاكاة: "الآن يمكنك قياس مدى تعقيد الفريق الذي يعمل على الاستقلالية - سواء كانت طائرة بدون طيار أو سيارة - من خلال مدى جديتهم في المحاكاة". "ويومو في القمة ، هم الأكثر تعقيدا."سألت رئيس الابتكار في Allstate Insurance Sunil Chintakindi عن Waymo. وقال: "بدون بنية تحتية موثوقة للمحاكاة ، لا يمكنك إنشاء آلات بأعلى مستويات الاستقلالية". "لن أتحدث حتى مع شخص يفكر بطريقة أخرى."يختار باحثون آخرون مسارات مماثلة. Huey Peng مدير Mcity ، مختبر النقل المستقل والموحد بجامعة ميشيغان. يقول Peng أن أي نظام يعمل على السيارات الآلية سيكون "مزيجًا من محاكاة بنسبة 99٪ وفحوصات هيكلية مصممة بعناية وبعض عمليات الفحص على الطرق".مع الطلاب الخريجين ، اقترحوا نظامًا للجمع بين الأميال الحقيقية المقطوعة والمحاكاة لتسريع الشيكات بشكل كبير. النظام يشبه إلى حد ما تطبيق Waymo. يقول بينج: "نقترح إزالة جميع مراحل القيادة المملّة وتركها مثيرة للاهتمام". "هذا سيسمح لك بالتسارع مئات المرات: ألف ميل يتحول إلى مليون."إن نطاق وتنظيم ونشاط مشروع Waymo مدهش. لقد وصفت الفحوصات الهيكلية التي أجرتها Google و Pengu ، بما في ذلك 20000 موقف دخلت في المحاكاة من الفحوصات الهيكلية التي أجراها الفريق في القلعة. في البداية لم يسمعني وبدأ يقول أن "مواقف 2000 هذه شخصية مؤثرة". صححته: "لقد كان 20 ألف محاكاة". كان صامتاً. وقال: "20000". "هذا مثير للإعجاب."في الواقع ، تمثل كل هذه الحالات البالغ عددها 20000 جزءًا صغيرًا من العدد الإجمالي للحالات التي تم التحقق منها بواسطة Waymo. هذه ليست سوى نتائج معالجة الشيكات الهيكلية. لديهم المزيد من المواقف المأخوذة من القيادة على الطرق الحقيقية وفقط من رؤوسهم.قال بنغ: "إنهم يحسنون الأداء". "إنهم يتفوقون كثيرًا على أي شخص آخر في تطوير المستوى الرابع" ، باستخدام تقليل المصطلحات لسيارة مستقلة بالكامل.وعبر بنغ عن موقف صانعي السيارات التقليديين. قال إنهم يحاولون تحقيق شيء مختلف تمامًا. إنهم لا يهدفون إلى الاستقلال الذاتي الكامل ، لكنهم يحاولون إضافة التقنيات التي تساعد على القيادة ، و "كسب بعض المال" ، ثم المضي قدمًا نحو الاستقلال الذاتي الكامل. لا يمكن مقارنة Waymo بالموارد وحرية الشركات لوضع جهاز تحديد مدى ليزر 70،000 دولار على جهاز مع شركة تصنيع مثل Chevy ، التي لا يجب أن تكلف سياراتها أكثر من 40،000 دولار ليتم بيعها في السوق."تقول جنرال موتورز وفورد وتويوتا والباقي:" دعني أقوم بتقليل التصادمات والإصابات وزيادة السلامة للمستهلك الشامل. " يقول بنغ إن هدفهم مختلف تمامًا. "نحن بحاجة إلى التفكير في ملايين السيارات ، وليس فقط بضعة آلاف".وواجهت وايمو عقبات في السباق من أجل الاستقلال الذاتي الكامل أكثر مما اعتادت عليه ، على سبيل المثال ، تيسلا. كريس جيردي مديرة مركز ستانفورد لأبحاث السيارات. قبل ثمانية عشر شهرًا أخبر زميلي أن Waymo "لديه فهم أفضل بكثير لعمق المشاكل وكم اقتربنا من حلها". عندما سألته الأسبوع الماضي عما إذا كان لا يزال يعتقد ذلك ، قال "الكثير تغير. "يقول: "عرضت شركات صناعة السيارات مثل فورد وجنرال موتورز سياراتها وبنت مجموعات بيانات الطرق الخاصة بهم". - جمع تسلا كمية كبيرة من البيانات من تطوير الطيار الآلي ، ودرس كيف يتصرف النظام بدقة في الظروف التي يجد فيها العملاء أنفسهم. إن قدرتهم على اختبار الخوارزميات بهدوء وقاعدة آلاتهم المتنامية بسرعة تمثل أرضية اختبار مذهلة. "يقول جيردي إنه في عالم المحاكاة ، رأى العديد من المنافسين ببرامج جادة إلى حد ما. "أنا متأكد من أن هناك الكثير من إمكانيات المحاكاة ، لكني رأيت عددًا من الأمثلة الجيدة جدًا. لم يعد Waymo يبدو فريدًا جدًا. لقد كان لديهم بالفعل إعاقة ، ولكن اليوم هناك العديد من المجموعات التي تعاني من نهج مماثلة. لذا فإن السؤال الآن هو من سيفعل ذلك بشكل أفضل ".هذا ليس مجرد نوع من إظهار عملية الشبكة العصبية التي تبدو وكأنها دماغ. هذه قفزة كبيرة إلى الأمام في تطوير الذكاء الاصطناعي ، حتى بالنسبة لشركة Alphabet ، المعروفة بسياسات الذكاء الاصطناعي العدوانية. هذه ليست صور Google ، حيث الخطأ لا يساوي شيئًا. هذا هو النظام الذي سيعيش ويتفاعل بشكل مستقل تمامًا مع عالم الناس. سوف تفهم قواعدنا ، وتوصل رغباتها ، وسوف تصبح واضحة لأعيننا وعقولنا.يبدو أن Waymo قد ابتعدت قليلاً عن العمل مع ركوب الخيل كمهارة فنية محددة ، وتنتقل إلى العمل معها كشكل من أشكال النشاط الاجتماعي البشري. ماذا يعني القيادة "بشكل طبيعي" وليس "بشكل قانوني" فقط؟ كيف تعلم هذا الذكاء الاصطناعي؟اتضح أنه لإنشاء مثل هذا الذكاء الاصطناعي ، لا تحتاج فقط إلى كمية كبيرة من البيانات وفن المبرمجين. هذه شروط ضرورية لكنها غير كافية. جزء من هذا ضروري حتى يتزامن الناس مع السيارات ويفهمون العالم كما هم. يفهم السائقون في القلعة ما يعنيه أن يكون أحد هذه الآلات ، لرؤية واتخاذ القرارات كما هي. ربما يعمل هذا في كلا الاتجاهين - فكلما كان الناس يفهمون الآلات بشكل أفضل ، كانت الآلات الأفضل تفهم الناس.تصبح ذاكرة الدوار في أوستن جزءًا من القلعة ، وتصبح مجموعة بيانات السيارة الآلية الوضع بالنسبة لـ Carcraft وتصبح شبكة المحاكاة تصبح البرنامج الجديد الذي يعود أخيرًا إلى سيارة الروبوت المادي التي تذهب إلى هذا الدوار في تكساس.حتى داخل التجريد المضلع للمحاكاة التي تستخدمها منظمة العفو الدولية للتعرف على العالم ، هناك آثار الأحلام البشرية ، وأجزاء من الذكريات ، ومشاعر السائقين. هذه المكونات ليست أخطاء وليست بقع تحتاج إلى التنظيف ، ولكنها الأجزاء الضرورية من النظام الذي يمكن أن يحدث ثورة في النقل ، في المدن ، والجحيم ، في كل مكان تقريبًا.