مرحبًا Geektimes!
الدخول
نعلم جميعًا لفترة طويلة أن الروبوتات هي مستقبلنا. هناك العديد من مجالات الروبوتات. التطورات العسكرية والروبوتية الاجتماعية والترفيهية والعادلة.
لكن هذه المرة أود أن أخبرك نيابة عن فريق الكلية في MIREA عن العنصر التنافسي ، وعن روبوتات مصارعي السومو بالضبط.
القليل عن فريقنا
نحن موجودون منذ عام 2014. الفائزون والفائزون في معظم المسابقات هم Robofinist و Robofest و MIPT Spartakiad والبطولات الأصغر ، كما أننا أبطال مطلقون لروسيا لعام 2016-2017 في ترشيح السومو المصغر.
من هم روبوتات السومو؟
في البداية ، عندما علمنا لأول مرة عن مثل هذه المسابقات ، تم صنع مصارعي السومو بشكل رئيسي من ليغو. لكن هذه فكرة سيئة للغاية ، المزيد عن ذلك لاحقًا.
في الوقت الحالي ، يتم وصف عازف السوم الصحيح بكل بساطة: قطعة حديد مستقلة تمامًا على عجلات ، مع أدمغة وزوج من أجهزة الاستشعار ، والتي تطرق قطعة مماثلة من الحديد خارج الحلقة.
هناك 4 أنواع منها:
1. ميجا سومويست
2. مصغرة سومويست
3. عازف السومو الصغير
4. نانو سومويست
كلها تختلف ليس فقط خارجيًا ، ولكن أيضًا داخليًا.
ميجا هي أكبر وأخطر الروبوتات. الوزن الأقصى يصل إلى 3 كجم ، والقدرة على وضع "أكواب شفط" مختلفة ، وهو ما لا يسمح به مع الروبوتات الأخرى.
ميني - روبوتات صغيرة لطيفة تصل إلى 500 جرام 10 × 10 سم ليس من الصعب لحامها ، من السهل تركيبها وتجميعها. هم الترشيح الأكثر شعبية في السومو.
صور مصغرة ومتناهية الصغر. مايكرو 5 × 5 × 5 ، نانو 2.5 × 2.5 × 2.5. من الصعب اللحام والتقاط التفاصيل. أكثر شعبية من ميجا السومو.
في
هذه الصفحة ، يمكنك قراءة قواعد المنافسة بمزيد من التفصيل. (مضاف)
ما هو جوهر robo sumo؟
الهدف الرئيسي: دفع العدو إلى ما وراء حدود مضلع دائري. الشخص الذي يلمس أي شيء خارجها يفقد أولاً. يبدو أن الشيء الصعب هو ببساطة دفع العدو للخارج؟ والصعوبة هي أن الروبوتات مستقلة تمامًا وتظهر المزيد والمزيد من الاستراتيجيات الجديدة ، والتي تزداد صعوبة في التعامل معها.
فيديو يضم روبوتاتنا (مضاف):
Robofest 2016 (الروبوت مع البرق ، الروبوت مع علم القراصنة ، الروبوت الأسود المنخفض ، الروبوت الأسود العالي بدون صورة)
نزهة Robo 2017 (فقط الروبوتات لدينا باستثناء الروبوت المستطيل مع أجهزة استشعار الصوت)
بدون مشاركة:
روبوتكس 2016بطولة الروبوتات اللاتفية 2017مسابقة RoboChallenge 2016 للروبوتلمحة صغيرة عن تكتيكات البحث العدو.مما صنعت؟
دعنا نعود إلى ليغو. على الأرجح ، حاول الكثير منكم القيام بشيء ما باستخدام مُنشئ ليغو قابل للبرمجة ، أو على الأقل رأوا كيفية القيام بذلك. حتى أن هناك ترشيحًا منفصلاً لمثل هذه الروبوتات 15 × 15 ، ولكنه ممل للغاية ومناسب فقط للمبتدئين أو الروبوتات الصغيرة. بالمقارنة مع العينات محلية الصنع ، يفقد هذا في كل شيء باستثناء تعقيد التجميع.
الأول سرعة منخفضة. ثانياً ، أحجام ضخمة. ثالثًا ، سرعة الاستجابة المنخفضة لأجهزة الاستشعار. وكذلك وحدة التحكم نفسها تترك الكثير مما هو مرغوب فيه.
تفاصيل عن التجميع والتجمع
مصارعو السومو الذين يشكلون المنافسة يفعلون اردوينو. يستخدمون الألواح القماشية ، وأجهزة استشعار اللحام ، ووحدة تحكم ، ومحركًا لها ، وما إلى ذلك. وهناك أيضًا مجموعة واسعة من أجهزة الاستشعار للكشف عن الخصم ، ولكن يجب استخدام أجهزة استشعار بالأشعة تحت الحمراء أو الليزر ، لأن السونار بطيئة وضخمة للغاية. بالطبع ، هناك حاجة إلى محركات وعجلات حتى يتمكن الروبوت من التحرك. يمكنك وضعهم على عدد غير محدود ، لكن الممارسة تظهر أن الروبوت أفضل ركوب على عجلتين تقعان في الخلف. وبالطبع ، لا يمكن للروبوت أن يعيش بدون دلو وخطاف. دلو هو مجرد حالة ، وغطاء وحماية للوحة والعناصر. في معظم الأحيان ، الفولاذ أو الحديد. تُصنع المقطورات من شفرات سكاكين القرطاسية ، ولكن هناك عينات ذات نهج غير قياسي ، على سبيل المثال ، مسطرة خشبية حادة أو صوف قطني ، ولكن هناك القليل من الاستخدام لهذا النهج.
أصعب (بالإضافة إلى البرمجة) لتصميم الروبوت.ولكن بشكل خاص لأولئك الذين يرغبون في المشاركة ، ولكنهم لا يعرفون حتى الآن من أين نبدأ ، نحن مستعدون لمشاركة أثر الروبوت ، الذي فاز بجائزة MIPT 2016 Spartakiad.
PS Done في
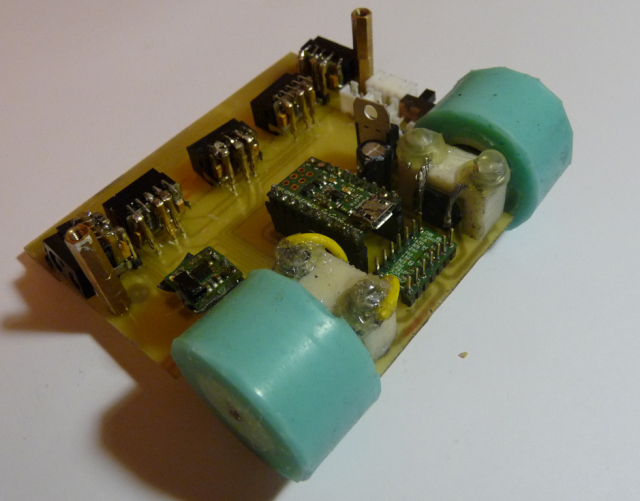
SprintLayoutوهذا ما يسمى المرحلة الأولى - وضع المحركات وأجهزة الاستشعار. يمكنك أيضًا ملاحظة مستشعرين صغيرين أمام الالتقاط ، لذا فهذه مستشعرات الخط.
يتم استخدامها للكشف عن شريط أبيض في مكب النفايات لتجنب السقوط بطريق الخطأ خارج الحلبة ، ولكنها ليست مكونًا إلزاميًا وفي الواقع لا يتم استخدامها في كثير من الأحيان. لا تسمح لك السرعات العالية بالتوقف في الوقت المحدد.
وهنا يتم تطبيق وحدة التحكم والسائق والمفاتيح وموصل البطارية بالفعل.
يبقى فقط لطباعة التتبع ونقله إلى PCB ، ثم تتبع المسارات.
إليك ما يبدو على اللوح النهائي:
جاهز لإطلاق الروبوت:
كما ترون ، لا يوجد شيء معقد بشكل خاص هنا. حول المشاكل أدناه.
دعنا ننتقل إلى البرمجة
أسهل طريقة هي استخدام وحدات تحكم متوافقة مع اردوينو أو اردوينو. أيضا ، اردوينو IDE لمساعدتنا. وفقًا للمخطط القياسي ، يحتوي الروبوت على 5 أجهزة استشعار. لذلك قد تكون الدول
نستبعد الموقف عندما ترى المستشعرات الجانبية العدو في نفس الوقت (لأن هذا لا يمكن أن يحدث ، وإذا حدث ذلك ، فهناك خلل في أحد المستشعرات) ، بالإضافة إلى موقف يعطي فيه المستشعران الأماميان والمستشعران صفرًا (أي انظر) ، لأن هذا لا يمكن أن يكون كذلك ، أو أن الفرصة ضئيلة للغاية.
لجعله يذهب إلى العدو ، نحتاج فقط إلى تثبيت المسامير ، وتطبيق الجهد على المحركات وقراءة قراءات المستشعر:
كود الروبوت// int pin_left=10; int pin_center_left=11; int pin_center_right=4; int pin_center=12; int pin_right=7; // int pin_motor_left_forward=9; int pin_motor_left_back=6; int pin_motor_right_forward=3; int pin_motor_right_back=5; // int cl,cc,cr,l,r; // void GLAZ() { cl = digitalRead(pin_center_left); cc = digitalRead(pin_center); cr = digitalRead(pin_center_right); l = digitalRead(pin_left); r = digitalRead(pin_right); } // , 0 255 void MOVE( int a, int b ) { if(a<0) { digitalWrite(pin_motor_left_forward,LOW); analogWrite(pin_motor_left_back,0-a); } else { analogWrite(pin_motor_left_forward,a); digitalWrite(pin_motor_left_back,LOW); } if(b<0) { digitalWrite(pin_motor_right_forward,LOW); analogWrite(pin_motor_right_back,0-b); } else { digitalWrite(pin_motor_right_back,LOW); analogWrite(pin_motor_right_forward,b); } } void setup() { pinMode (pin_center,INPUT);// pinMode (pin_right, INPUT);// pinMode (pin_left,INPUT);// pinMode (pin_center_right, INPUT);// pinMode (pin_center_left,INPUT);// pinMode (pin_line_left, INPUT); pinMode (pin_line_right, INPUT); pinMode (pin_start,INPUT);// pinMode (13,OUTPUT);// digitalWrite(13,HIGH); pinMode (pin_motor_left_back, OUTPUT);// pinMode (pin_motor_right_forward, OUTPUT);// pinMode (pin_motor_right_back, OUTPUT);// pinMode (pin_motor_left_forward,OUTPUT);// // while(!digitalRead(pin_start))continue; MOVE(200,200); } void loop() { GLAZ(); if(l && r) { if( (cl + cc + cr) < 2 || !cc ){ MOVE(255,255); } if( cc ) { if(!cl && cr) MOVE(0-180,180); if(cl && !cr) MOVE(180,0-180); } } else if( cc + cr + cl == 3 ) { if(!l && r) MOVE(0-200,200); if(!r && l) MOVE(200,0-200); } else if(cc) { if(!l && !cl && cr && r) MOVE(0-150,150); if(l && cl && !cr && !r) MOVE(150,0-150); } if(!digitalRead(pin_start))while(1){MOVE(0,0);} }
عليك فقط تحسين الكود.
هام!تقوم المستشعرات بإرجاع 1 إذا لم يروا شيئًا ، و 0 إذا كان هناك عائق.
بعد تنزيل الرمز عبر USB ، يكون الروبوت جاهزًا للتنافس.
يستحق النظر
أولاً ، هذه هي العناصر. أجهزة الاستشعار التي نستخدمها (حادة 340) نادرة أو غير موجودة على الإطلاق. لذلك ، إذا كان ذلك ممكنًا ، فأنت بحاجة إلى أخذ الكثير في وقت واحد أو البحث عن تناظرية مناسبة للمعلمات.
ثانيًا ، من المستحيل إلحاق أي ضرر خطير بروبوت العدو أو استخدام المغناطيس ، على سبيل المثال ، لالتقاط. هذا يحدنا قليلاً في اختيار وسائل النضال.
أيضا لا تنسى العجلات. لن تعمل المنحنيات والرقيقة والمنزلقة ، فلن تتمكن ببساطة من المناورة ولحظة القوة ليست كافية. تأكد من اختبار المطاط.
عند العمل مع المحركات ، ضع في اعتبارك أنه سيتعين عليهم العمل تحت الحمولة القصوى وسيحترقون كثيرًا.
من المنطقي أيضًا عمل بطاريات قابلة للإزالة ، مثل يفرغ الروبوت بسرعة كبيرة ويستغرق شحنه وقتًا طويلاً.
قائمة المشتريات الضرورية:
1. لحام الحديد ، لحام ، الجريان (اختياري)
2. ألواح تكسية القماش (للحفر ، تحتاج إلى إغلاق جميع المسارات ، ثم وضعها كلها في محلول بيروكسيد الهيدروجين + حامض الستريك + ملح لعدة ساعات ، ثم تمزيق الورق ، على سبيل المثال ، الذي تم إخفاء المسارات فيه)
3. مجسات شارب 340
4. محركات ، واختيار لتذوق ، والمزيد من دورة في الدقيقة ، كان ذلك أفضل.
بعض من هذا
يستحق الاختيار :
polulu. (مضاف)
5. البطاريات (أنصحك بأخذ الليثيوم بوليمر) + محطة شحن
6. المفتاح (زر التبديل ، ملحوم باللوحة) والعناصر الكهربائية (انظر الصورة مع التتبع)
7. سائق
8. جهاز تحكم ، بالنسبة للمبتدئين ، يمكنك تجربة Polulu A-Star 32u4 micro وملء محمل التمهيد Arduino
9. الصفائح المعدنية للإسكان
10. تمرين ثقوب في اللوح
11. قاذفة ولها وحدة البداية
سكرتير خاص إذا فاتك شيء - الكتابة ، وسوف تصحيحه.
المنافسة
ستقام المسابقات القادمة في سانت بطرسبرغ ، Robofinist ، لذلك نحن الآن نستعد بجد لها ، وإذا كنت ترغب في المشاركة ، فأنت بحاجة إلى القيام بكل شيء بوضوح وسرعة.
لكن هذه المسابقات ليست الوحيدة ، فهناك الكثير منها في روسيا ، وتقام أكبرها في موسكو. مرة واحدة في الشهر أو شهرين ، يمكنك تجربة السعادة والتنافس.
مثل هذه المسابقات في الخارج ليست شائعة ونريد أيضًا الوصول إلى هناك. فيما يلي خريطة تقريبية للمسابقات العالمية:

نأمل حقًا في أن يتطور robo-sumo في بلدنا فقط ، وندعو الجميع للمشاركة في إنشاء الروبوت الخاص بهم.
تبدو ملحمية للغاية عندما تطير قطع من بعض الروبوتات.نحن ننهي هذا المقال التمهيدي لنا ونتمنى للجميع النجاح في الروبوتات ، ويسعدنا أن نراكم في المسابقات!