في منشور سابق ، قدمت لمحة عامة عن تاريخ المصممين الهندسيين fischertechnik من 1965 إلى 2017 ، والآن ، وفقًا لرغبات القراء ، أنشر نظرة عامة على مجموعة 524328 ROBOTICS TXT Discovery.

تم تصميم منشئ 524328 للفتيان والفتيات المهتمين بالميكانيكا ، والأتمتة ، والبرمجة ، ورؤية الكمبيوتر ، أو ، كما يقولون الآن ، في الروبوتات.
يحتوي صندوق الكرتون على أجزاء ميكانيكية ، ومحركات ، ووحدة تحكم TXT قابلة للبرمجة ، وكاميرا فيديو ، وبرنامج ROBO Pro ، وإرشادات التجميع ، وكتاب صغير بتنسيق PDF مع مواد تعليمية.
بالإضافة إلى ذلك ، للعمل مع المصمم ، نحتاج إلى بطارية 34969 ، والتي تحتوي على بطارية NiMH وشاحن.
ومع ذلك ، قبل أن أنتقل إلى وصف مفصل للمجموعة ، أقترح أن تتعرف على تاريخ أول مصمم fischertechnik مخصص للروبوتات.
الخلفية
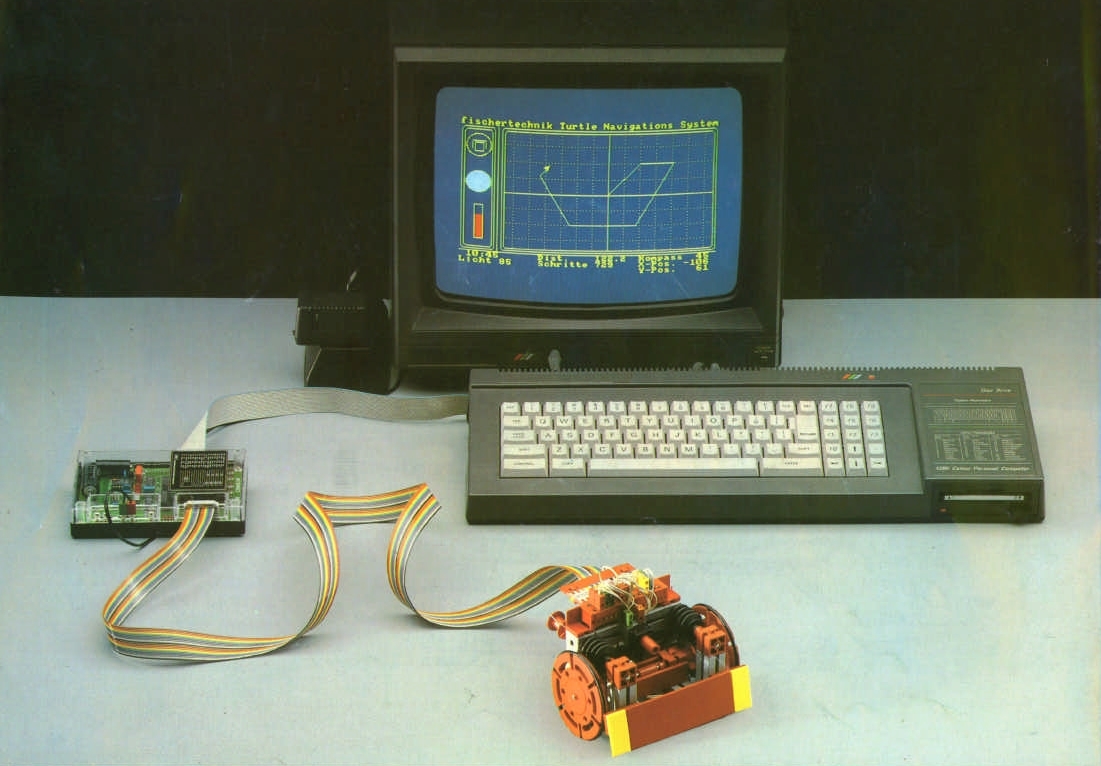
ظهر المصمم الأول القائم على fischertechnik المخصص للروبوتات المتنقلة في عام 1983 كجزء من مشروع تعليمي تجريبي تم إجراؤه في ذلك الوقت في المملكة المتحدة.
لفتت شركة الاقتصاديات ، التي عملت في المشروع ، الانتباه إلى عمل عالِم شاب من معهد ماساتشوستس للتكنولوجيا سيمور بيبرت (1928-2016) ، الذي تنبأ بحجم الثورة الوشيكة في مجال تكنولوجيا الكمبيوتر ، واقترح البدء في تعريف الأطفال على أجهزة الكمبيوتر من سن مبكرة باستخدام التدريب الذي طوره فريقه. شعار لغة البرمجة.
كانت إحدى السمات المهمة للشعار هي الواجهة الودية لبيئة وقت التشغيل ووجود كائن تحكم افتراضي في هذه البيئة - "سلحفاة" رسومية ، والتي ، وفقًا لأوامر البرنامج المترجمة ، يمكن أن تتحرك حول شاشة الكمبيوتر ، تاركة أثرًا. بالمناسبة ، تحول عمل السيد بيبرت هذا عدة مرات واستمر حتى يومنا هذا في شكل بيئة برمجة تعلم تسمى سكراتش (سنتحدث عن هذا لاحقًا).
لذلك ، في الحل الذي تم اقتراحه نتيجة لذلك ، تم اقتراح استبدال السلحفاة الافتراضية بكائن حقيقي للغاية - عربة متنقلة. وبالتالي ، فإن الطلاب لديهم الفرصة ليس فقط للتعرف على تقنيات البرمجة ، ولكن أيضًا لتعلم أساسيات الروبوتات. لذلك ظهرت أول مجموعة BBC Buggy:
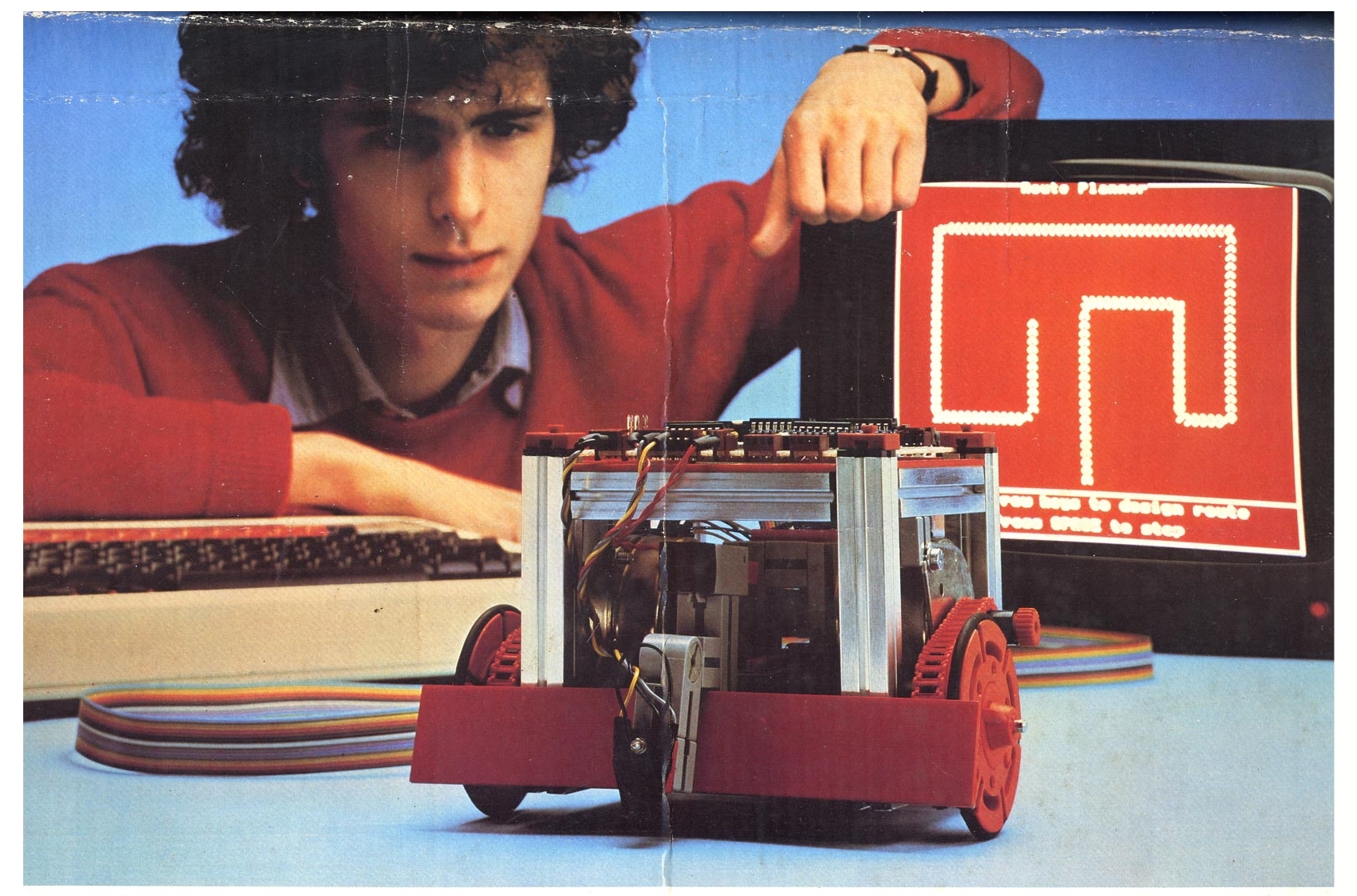
تضمنت المجموعة أجزاء fischertechnik لتجميع العربة ، ولوحة تحكم ، وناقل مع أمثلة لبرامج التحكم ، وإرشادات بمهام التدريب. تم توصيل لوحة التحكم بالكمبيوتر باستخدام كابل مسطح. يمكننا القول أنه كان مشروعًا مشتركًا fischertechnik + Economatics.
أطلقت Fischertechnik أول مجموعة تجارب للروبوتات مملوكة بالكامل في عام 1987 - 39502 الحوسبة التجريبية. من خلال المجموعة ، كان من الممكن بناء العديد من المتغيرات من الأجهزة الآلية وتجربة خوارزميات التحكم في البرمجة
تبع ذلك الجيل القادم من المصممين ومجموعات إضافية للتوسع الوظيفي ، لكن هذه قصة تتطلب مقالة منفصلة. أقترح اليوم إلقاء نظرة فاحصة على المجموعة الحالية - 524328 ROBOTICS TXT Discovery set
524328 مجموعة اكتشاف روبوتات TXT
يتكون المصمم 524328 من 310 أجزاء ، يمكن من خلالها بناء 14 نموذجًا للتجارب. بالإضافة إلى تعليمات التجميع وقرص مضغوط مع برنامج ROBO Pro ، يحتوي الصندوق أيضًا على فراغات لتجميع أرضية اختبار لاختبار الروبوتات المحمولة. تقليديا ، يرافق المجموعة كتاب صغير بتنسيق PDF ، يمكنك من خلاله الحصول على المعلومات الأساسية من مجال الروبوتات.
مظهر التغليف:

يتم تخزين الأجزاء داخل صندوق من الورق المقوى في كوخين بلاستيكيين في حجيرات منفصلة. إذا كنت ترغب في ذلك ، يمكنك أيضًا شراء نظام تخزين خاص واستخدام ركائز لفرز الأجزاء التي يمكن قطعها بسهولة باستخدام المقص من تعليمات التجميع.
للاستخدام في الأكواب والمدارس ، يتم تغليف هذا المصمم في حاويات بلاستيكية أكثر ملاءمة ومتانة Gratnells ولديه رقم طلب آخر - 533018.

بالإضافة إلى العناصر الهيكلية البسيطة ، تتضمن قائمة الأجزاء محركين مؤازرين مع مشفرات مدمجة ومحرك DC تقليدي مع علبة تروس خارجية وترانزستور ضوئي ومقاوم حراري وحافلات ومصابيح LED وكرة برتقالية للتجارب مع نظام رؤية الكمبيوتر:

(بالضغط على الصورة - موقع توظيف)
تحكم TXT قابل للبرمجة
تم تصميم وحدة التحكم في المصمم 524328 على شكل كمبيوتر مدمج مبني على أساس معالج ARM Cortex A8 ولوحة مدخلات إخراج مدمجة في ARM Cortex M3. للتفاعل مع المستخدم ، تحتوي الوحدة على شاشة ملونة تعمل باللمس مقاس 2.4 بوصة 320 × 240 مع إضاءة خلفية. بالإضافة إلى ذلك ، يحتوي الكمبيوتر على مكبر صوت مدمج و RTC مع طاقة احتياطية من بطارية ليثيوم.
تحكم TXT:

تعمل وحدة التحكم TXT تحت نظام التشغيل Linux kernel. إذا رغبت في ذلك ، يمكنك تشغيل نظام التشغيل الخاص بك من بطاقة ذاكرة micro SD.
الذاكرة
- ذاكرة وصول عشوائي DDR3 بسعة 128 ميجابايت
- 64 ميجا بايت فلاش
- مايكرو التنمية المستدامة
- جهاز تخزين USB كبير السعة
الاتصالات
واجهات وحدة التحكم لها الواجهات التالية:
- بلوتوث 2.1 EDR + 4.0
- WLAN 802.11 b / g / n
- موصل USB صغير للتوصيل بالكمبيوتر
- موصل USB-A مع وظيفة تحكم المضيف لتوصيل كاميرا USB ومحرك أقراص USB محمول وأجهزة أخرى.
- كاشف ضوئي IR لجهاز التحكم عن بعد من مجموعة "Remote control kit"
- واجهة I2C
- واجهة UART
- يمكن واجهة
المدخلات والمخرجات
- المدخلات العالمية: 8 قطع رقمية / تناظرية 0-9 فولت أو 0-5 كيلو أوم
- مدخلات العد: 4 قطع (0-9V Fin <1 kHz)
- مخرجات عالمية (PWM 9V / 0.25A): 8 قطع
فقط في حالة ، يمكن رؤية الأجزاء الداخلية لوحدة تحكم TXT في الصورة أدناه:
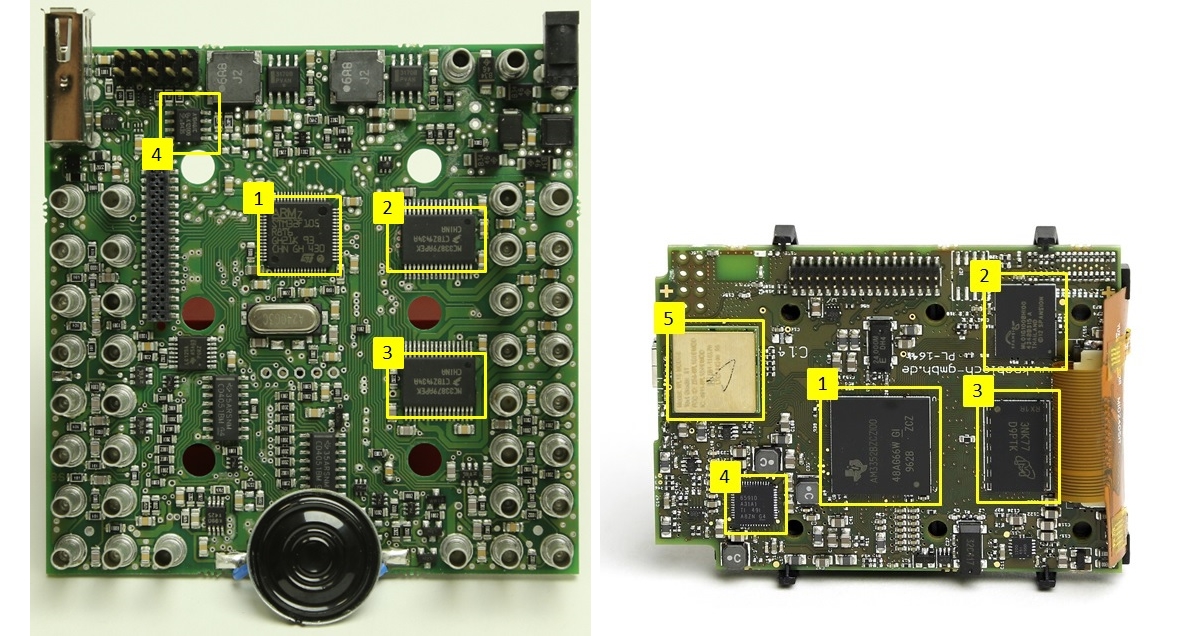
على لوحة الدائرة اليسرى:
- ST STM32F105R8T6 - متحكم ARM Cortex-M3.
- MC33879 - برنامج تشغيل الإخراج.
- MC33879 - برنامج تشغيل الإخراج.
- TJA1040 - برنامج تشغيل الناقل التسلسلي CAN.
على لوحة الدوائر اليمنى:
- TI AM3352B - متحكم ARM Cortex-A8.
- فلاش Spansion ML01G100 - فلاش NLC 64 ميجابايت.
- Samsung K4B2G - DDR3L 1600 DRAM 128 MB
- TPS65910 - وحدة إدارة الطاقة.
- WL18MODGB (5) كومبو واي فاي + وحدة بلوتوث.
ميزة مهمة لهذه المجموعة هي توفر الأجهزة والبرامج لتجارب رؤية الكمبيوتر. للقيام بذلك ، تحتوي المجموعة على كاميرا فيديو مع واجهة USB ، ويحتوي برنامج أداة ROBO Pro على مكتبة من وظائف رؤية الكمبيوتر ومكون للإعداد والتشغيل.

تحتوي مكتبة رؤية الكمبيوتر على الوظائف الأساسية التالية لمعالجة إطارات الفيديو:
- حساب متوسط السطوع لمنطقة معينة من إطار الفيديو.
- ابحث عن سلسلة من العناصر النقطية من نفس اللون لمنطقة معينة من إطار الفيديو.
- ابحث عن شكل هندسي ، حساب الإحداثيات والأحجام.
- كاشف حركة في منطقة إطار فيديو.
أداة تهيئة النظام الفرعي للرؤية الحاسوبية المضمنة في برنامج ROBO Pro:

برنامج روبو برو تولنج
لتطوير برامج التحكم لوحدة التحكم TXT ، يُقترح استخدام برنامج الأداة التعليمية ROBO Pro ، والذي يتضمن محررًا لمخططات كتلة الخوارزميات ومكتبة لعناصر البرنامج الأساسية ومكتبة لوظائف التطبيق وأدوات للتشغيل والتحكم عن بُعد. يعد برنامج ROBO Pro جزءًا من مجموعة التصميم. بشكل منفصل ، لا يشترط شرائه.
عادة ، تبدو نافذة المحرر مثل الصورة أدناه:
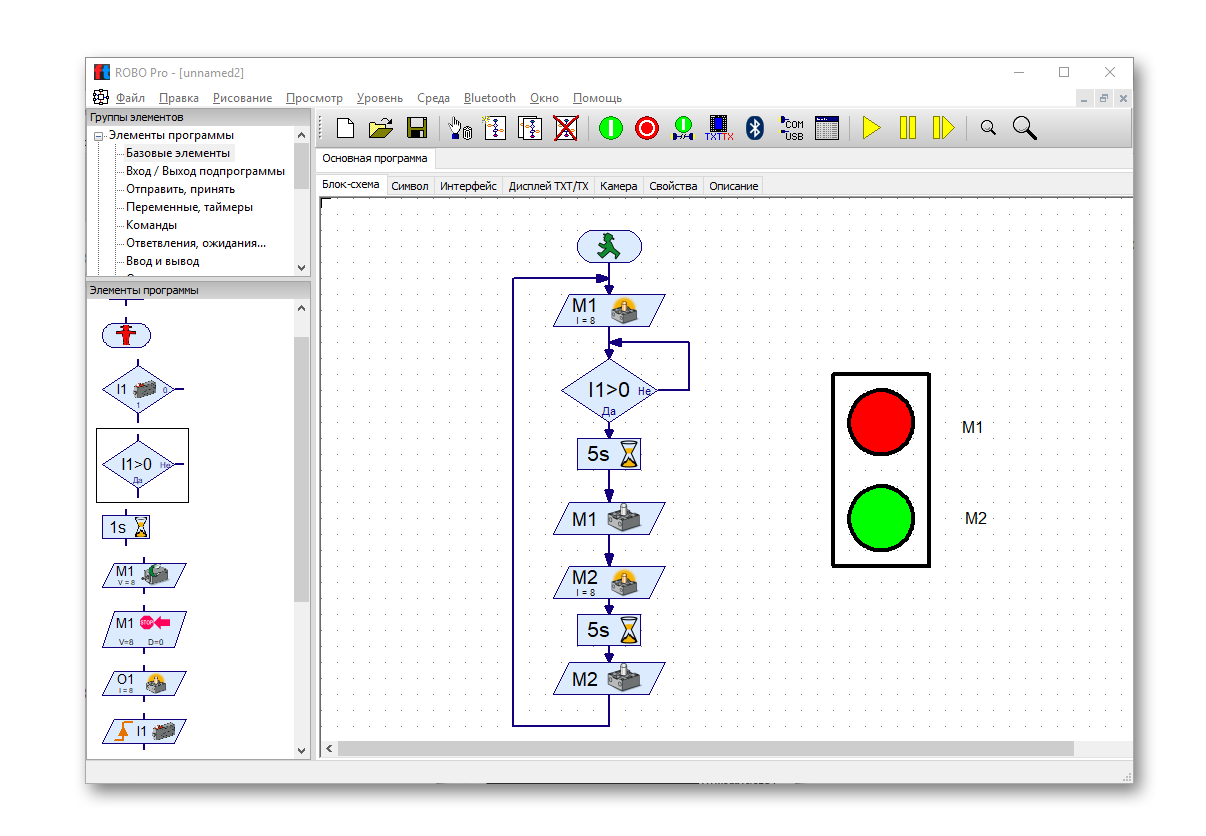
يتم تجميع خوارزميات التحكم في شكل مخططات انسيابية تقليدية تقليدية - كما هو معتاد في أدبيات تكنولوجيا المعلومات المتخصصة والوثائق التقنية. يمكنك ، بالطبع ، أن تسألني بشكل معقول: - ماذا عن سكراتش؟ لماذا يتم تضمينه في وثائق خوارزميات MK ATMEL أو PLC SIMATIC الموضحة في شكل مخططات انسيابية ، وليس في شكل دوائر خدش؟ هنا ، لا يمكنني الإجابة عليك بشكل معقول. ومع ذلك ، يسعد مهندسي الداخلي بفرصة استخدام أداة بصرية مقبولة بشكل عام بطريقة طبيعية لأول تعارف للأطفال مع تقنيات التحكم التلقائي.
فقط في حالة ، الخوارزميات من الوثائق الفنية :

يمكن تنفيذ المخططات الانسيابية المجمعة في المحرر في وضعين - محليًا على الجهاز الآلي أو عن بُعد عن طريق التنزيل إلى الجهاز المستهدف. الطريقة الأولى مناسبة لتصحيح الأخطاء. أثناء تنفيذ الخوارزمية ، يمكنك استخدام التنفيذ خطوة بخطوة وتسليط الضوء على الخطوة الحالية للخوارزمية.
بالنسبة للمستخدمين المتقدمين ، يتمتع ROBO Pro بدعم خوارزمية متعددة الخيوط. كما يتم دعم تحليل الخوارزميات في الإجراءات ، وهناك أيضًا عناصر واجهة المستخدم التي يمكن وضعها مباشرة على أوراق المخططات الانسيابية.
تحتوي مكتبة عناصر واجهة المستخدم على مسجل / راسم ، ومقاييس قرص وحقول لإدخال وإخراج القيم الرقمية. هذه ميزة مهمة للغاية لكل من المستخدمين المبتدئين والمتقدمين. تبسط القدرة على تسجيل البيانات في الوقت الحقيقي والتحليل اللاحق بشكل كبير دراسة خوارزميات التحكم الجديدة وتقليل وقت الإعداد بشكل كبير.
هذا هو شكل نافذة المحرر مع مشروع أكثر تعقيدًا:
مجموعات إضافية
يمكن توسيع وظائف المجموعة 524328 بمجموعات إضافية من سلسلة ROBOTICS:
وهي تختلف عن مُنشئ 524328 في غياب وحدة تحكم TXT. من المفترض أن الانتقال إلى هذه المجموعات يحدث بعد حل جميع المشاكل من المجموعة 524328.
أمثلة على المشروع
لقد أعددت العديد من مقاطع الفيديو التي تكشف عن بعض (ولكن ليس كل شيء) من إمكانيات مجموعة TXT Discovery للمُنشئ القياسي دون تفاصيل إضافية. جميع المشاريع من الأمثلة موجودة على جيثب . يسعدني أن أجيب على أسئلتكم في التعليقات.
خوارزميان بسيطان لإشارات المرور:
التحكم عن بعد باستخدام عناصر واجهة المستخدم وبث الفيديو في ROBO Pro:
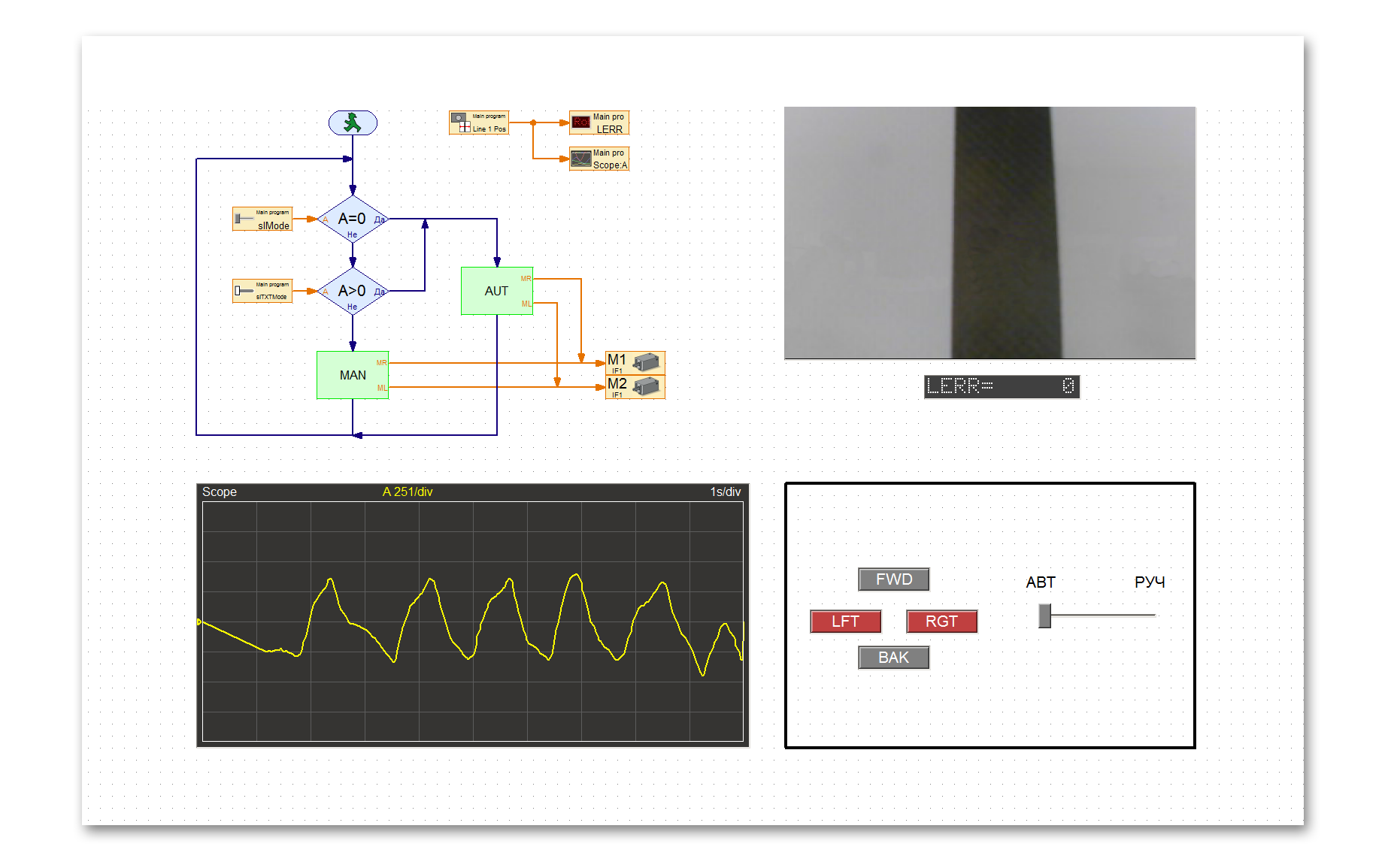
تحكم آلي في عربة التسوق مع تغذية مرتدة بناء على رؤية الكمبيوتر. يتم استخدام قانون التنظيم النسبي. كسب الارتباط النسبي KP = 3.5. يمكن ملاحظة أن العربة تتحرك بثبات على طول المسار - تتأرجح وتترك المسار في نهاية المطاف. انتبه لمسجل المعلمات. يسمح لك بتحديد قيمة التجاوز بعد إيقاف الحركة:
سبب السلوك غير المستقر هو أنه عندما تدور العربة ، تظهر قوى القصور الذاتي التي ستستمر في تدوير العربة حتى إذا كان إجراء التحكم من الرابط النسبي صفرًا. ونتيجة لذلك ، نرى كيف تنزلق العربة الخط ثم تبدأ في الاتجاه المعاكس - تحدث التذبذبات في النظام الديناميكي. هذا السلوك يقلل بشكل كبير من جودة التحكم وفي بعض الحالات يمكن أن يؤدي إلى الفشل.
لمواجهة قوى القصور الذاتي ، تتم إضافة عنصر تمايز إلى هيكل وحدة التحكم ، مما يشكل إشارة تتناسب مع التغيير في عدم التطابق عند إدخال وحدة التحكم. اضبط المعامل KD = 6.0 وانظر كيف تتصرف العربة:
الآن يمر الروبوت المسار بثبات. انتبه إلى الإشارة الخضراء الموجودة على المُسجل - هذه هي إشارة الخرج للرابط التفاضلي لوحدة التحكم ، مما يساعد على "إبطاء" دور الروبوت عندما يعود إلى المسار.
الخلاصة
أعلاه ، قدمت عدة أمثلة على استخدام مجموعة 524328 ROBOTICS TXT Discovery لتنظيم التمارين العملية حول نظرية التحكم الآلي. كانت الأمثلة المقدمة جافة للغاية وخالية من الحسابات النظرية. أعتقد أنه في أحد المنشورات التالية ، سأكون قادرًا على مشاركة أفضل الممارسات الخاصة بي فيما يتعلق بتنظيم دروس عملية في الأتمتة باستخدام منشئي fischertechnik. هل أنت مهتم بهذا؟
كالعادة ، لعشاق الهندسة الذين أتقنوا المنشور بأكمله ، خصم 15 ٪ على كود gktms1712 حتى 12/31/2017 بشكل حصري في متجر Pakpak . المجد للروبوتات!
المراجع
- قصة سلحفاة بي بي سي للتدريب السلحفاة 1983
- سيمور بابيرت - مخترع لغة الشعار
- بناء مخصص لنظام التشغيل للتحكم TXT
- خدش للتحكم TXT
- Python للتحكم TXT