تم إنشاؤه في الستينيات ، وكان Shakey أول روبوت متنقل لديه القدرة على تحليل أفعاله. لم تتحقق الأهداف الطموحة للمشروع بشكل كامل ، ولكن كان لها تأثير كبير على زيادة تطوير الروبوتات.
وصف مؤلفو مشروع Shakey كيف تم ترتيب التحكم في الروبوت في مقال كبير لمجلة AI Magazine. في هذا المنشور - ترجمة الجزء الأكثر إثارة للاهتمام والأهم للنص. كان مؤلفها ، بيتر هارت ، عضوًا في فريق التطوير. خلق Shakey
تم إطلاق مشروع Shakey في يناير 1965 بمبادرة من مركز الذكاء الاصطناعي في معهد ستانفورد للأبحاث (SRI International). اقترح المعهد تطوير "آلة ذكية" لتطبيقات الاستخبارات. لكن كان لدى مجموعة العمل دافع مختلف. أرادوا إنشاء موقع اختبار لربط جميع مجالات الذكاء الاصطناعي (التمثيل المنهجي ، والتفكير ، والتخطيط ، والتعلم الآلي ، ورؤية الكمبيوتر وفهم الكلام الطبيعي).
عند تطوير Shakey ، تم توجيه المهندسين بقاعدتين:
- يجب الحفاظ على الآليات بسيطة قدر الإمكان - وبالتالي ، لم يتم تثبيت ذراع مناور واحد على الروبوت ؛
- حتى لا تعمل لاحقًا على تقليل التصميم ، تم تثبيت رف الإلكترونيات في الأعلى.
نظرًا لأن قدرات Shakey الميكانيكية والحسية كانت محدودة ، فقد أنشأ فريق المشروع بيئة تجريبية قوية وبسيطة للروبوت - نصف دزينة غرف مع كتل هندسية كبيرة بداخلها. تم رسم الكتل ليتم التعرف عليها بواسطة كاميرا منخفضة الدقة.
كان أول كمبيوتر لـ Shakey هو SDS 940 مع ذاكرة أقل من ذاكرة التخزين المؤقت L2 لأجهزة الكمبيوتر المحمولة الحديثة. في عام 1970 ، تم استبدال DEC PDP-10 الأكثر قوة. تحدث Shakey إلى PDP-10 من خلال معالج الاتصالات. كان هذا النظام أحد تلك العقد التي ساهمت في ولادة ARPANET. في نفس الوقت تقريبًا ، بدأت إعادة كتابة كاملة لبرنامج Shakey. يحتاج الحديد فقط إلى الحد الأدنى من التحسينات.
عناصر تصميم Shakey الرئيسيةبرنامج Shakey
يعتمد الإصدار الثاني من المنتج على فكرتين أساسيتين. الأول هو تمثيل عالم Shakey من خلال حساب التفاضل والتكامل
الأصلي من الدرجة الأولى ، واستكمال النموذج بنموذج شبكي - وهو مكون رئيسي في الإصدار الأول.
كانت الفكرة الثانية هي بناء برنامج Shakey في عدة طبقات. تم استخدام هذا النهج للسيطرة على الروبوت لأول مرة. بعد ذلك ، نصف بإيجاز كل مستوى ، بدءًا من أوامر المستوى الأدنى.
فرق المستوى الأدنىتم إرسال الأوامر ذات المستوى الأدنى ، مثل ROLL و PAN ، مباشرةً إلى مكون أجهزة Shakey. على هذا المستوى ، توجد أيضًا فرق موجودة مثل PANTO ، والتي كانت مسؤولة عن تدوير "رأس" الجهاز في الاتجاه المحدد.
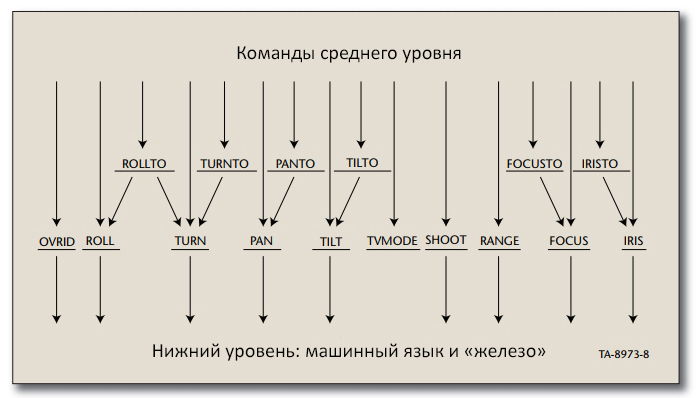 فرق المستوى المتوسط: سلاسل ماركوف
فرق المستوى المتوسط: سلاسل ماركوفعلى هذا المستوى توجد فرق مثل GOTHRUDOOR ("امش عبر الباب"). تم تخصيصهم إلى مستوى منفصل ، حيث تم تمثيلهم جميعًا
كسلاسل ماركوف .
سلسلة ماركوف لفريق GOTHRUDOORيمكن "قراءة" سلاسل ماركوف عن طريق مسح العمود الأيسر أولاً حتى يتم الوصول إلى الشرط الأول الصحيح الذي يؤدي الإجراء المقابل ، ثم العودة إلى بداية الجدول. وبناءً على ذلك ، تتميز سلاسل ماركوف بالاستقرار (يتم تبسيط خوارزمية الإجراءات قليلاً ، ولكن ممارسة "العودة إلى البداية" أساسية ، وكما سنرى ، سمة مهمة لهذه السلاسل).
إذا كانت الفرق متوسطة المستوى هي الأخيرة التي يمكن لـ Shakey تنفيذها ، فسيكون الروبوت محدودًا جدًا في أفعاله. يمكنه فقط تحقيق الأهداف التي تتطلب إجراءً واحدًا مبرمجًا مسبقًا. للقيام بالمزيد ، كان على Shakey أن يكون قادرًا على رسم سلسلة من الإجراءات (كخطة). كان المجدول الأوتوماتيكي STRIPS (معهد أبحاث ستانفورد لحل المشاكل) مسؤولاً عن ذلك. كان المستوى التالي الأعلى من البرمجيات.
STRIPS ، معهد ستانفورد للأبحاث ، حل المشكلاتنشأ المجدول الأوتوماتيكي STRIPS بسبب الجمع بين مفهومين كبيرين. الأول كان استراتيجية تخطيط تسمى تحليل الأهداف والوسائل. يتم تقديمه في نظام "حل المشكلات العامة" بواسطة هربرت سيمون وألين نيويل.
كان المفهوم الثاني هو برهان النظرية في حساب التفاضل والتكامل الأصلي وتطبيقه في أنظمة الإجابة على الأسئلة. هذا نوقش في عمل كورديل غرين. قام ريتشارد فيكس ونيلز نيلسون بدمج هذه المعرفة لإنشاء STRIPS في عام 1971 ، والتي استخدمت تحليل الهدف والهدف لحساب المسندات.
بلانيكس ، تنفيذ الخطة التنفيذيةبعد وقت قصير من إنشاء STRIPS ، وجد فريق المعهد طريقة لتعميم خطة STRIPS عن طريق استبدال الثوابت في النظام بمتغيرات. كما اخترعوا بنية بيانات تسمى جدول المثلث ، والذي يوضح الترابط الداخلي لخطة عامة. شكلت هذه التصاميم أساس نظام PLANEX ، وهو أحدث مستوى من برامج Shakey (Fykes و Hart و Nielson ، 1972).
باستخدام هذا البرنامج ، يمكن لـ PLANEX مراقبة التنفيذ الفعلي للخطة. قد يلاحظ النظام إذا حدث خطأ ما ويعيد جدولة العمل من تلك اللحظة ، ويعيد استخدام أجزاء من الخطة الحالية حيثما أمكن. يمكن أن يكون حتى قرار "ريادة الأعمال": إذا كان شاكي يقترب فجأة من إكمال مهمته ، يمكنه تحويله لصالحه.
كانت هذه القدرة على اكتشاف الأخطاء واستعادتها جزءًا مهمًا من برنامج Shakey. هناك فرق كبير بين إنشاء خطة عمل لروبوت حقيقي يعمل في العالم الحقيقي ، حيث قد يحدث خطأ ما ، ومخطط "مجرد" يطبع مجرد خطة رمزية. أصبحت سلاسل PLANEX و Markov هي الحل لتحقيق التخطيط الواقعي الموثوق.
التسلسل الهرمي لمستوى البرامجرؤية الكمبيوتر
لم تتطلب خطة المشروع الأولية إجراء بحث مكثف في مجال الرؤية الحاسوبية. وبدلاً من ذلك ، كانت الخطة هي دمج تقنيات رؤية الكمبيوتر الحالية في منصة تجريبية. ولكن ، كما اتضح ، في ذلك الوقت كان هناك عدد قليل جدًا من التقنيات المتاحة ، لذلك كان على المتخصصين العمل بجد في مجال أبحاث رؤية الكمبيوتر.
كانت إحدى النتائج المهمة لهذا العمل اختراع ما يمكن تسميته الشكل الحديث لتحويل Hough ، وهي طريقة تستخدم لاستخراج العناصر من صورة (R. Duda ، P. Hart ، 1972). وقد تحقق ذلك من خلال الجمع بين مفهومين يبدو للوهلة الأولى أنهما غير مرتبطين تمامًا.
تم تضمين الفكرة الأولى في براءة اختراع Paul Hough. يصف التحول من نقاط في مستوى الصورة إلى خطوط مستقيمة في مساحة التحويل. تتوافق الخطوط المتقاطعة في الأخير مع نقاط متداخلة في الشكل. لكن مشكلة المنحدرات اللانهائية تنشأ ، مما يجعل هذا التحول مرهقًا حسابيًا.
تأتي الفكرة الثانية من ما يسمى بالهندسة المتكاملة. كان لدى علماء الرياضيات أسباب نظرية لاستخدام معلمة نصف القطر الزاوي للخط بدلاً من اعتراض المنحدر الأكثر شيوعًا الذي يستخدمه هوغ. لاحظ بيتر هارت أنه عند استبدال تحويل Hough الخطي بتحويل جيبي ، لا يتم حل مشكلة المنحدرات اللانهائية فقط ، ولكن التحول الجديد ثابت في اختيار الإحداثيات. بالإضافة إلى ذلك ، قام بيتر هارت وريتشارد دودا بتوسيع هذه الطريقة للكشف عن المنحنيات التحليلية في الصور ، وقد تم استخدام هذا التحول منذ ذلك الحين.
خوارزمية الملاحة و A *
كان على Shakey التركيز على التضاريس ، لذلك تم تطوير العديد من أقصر خوارزميات المسار. واحد منهم ، يسمى A * ، تم إنشاؤه بواسطة بيتر هارت ، ونيلز نيلسون ، وبرترام رافائيل. تحتوي الخوارزمية الجديدة على خصائص مفيدة للغاية: أولاً ، وجدت دائمًا المسار الأقصر ، وثانيًا ، بينما حددت الحد الأدنى من الاحتمالات البديلة. يمكننا القول أنها تعمل دائمًا وتتسم بالكفاءة الحسابية.
قد تعتقد أن مثل هذه النتيجة الهامة سترحب بأي منشور بسرور ، لكنها تحولت إلى العكس. تم رفض عرض خوارزمية A * من قبل جميع المجلات العلمية المرموقة في ذلك الوقت.
بالنظر إلى هذه المراجعات القديمة ، قد تعتقد أن المحررين قدموا تقريرًا إلى علماء الرياضيات لقراءتها بسبب كل هذه النظريات المخيفة. ومع ذلك ، لم يعجب علماء الرياضيات ، حيث تم عرض الرسوم البيانية فقط مع عدد محدود من العقد من البراهين. في ذلك الوقت ، بدا للمؤلفين أن علماء الرياضيات لم يروا الفرق بين رسم بياني بعشر عقد ورسم بياني بعشرة تريليون عقد. ولكن بالنسبة للعلماء العاملين في مجال علوم الكمبيوتر ، فإن هذا الاختلاف كبير.
في النهاية ، تم قبول التقرير في معهد مهندسي الكهرباء والإلكترونيات (معاملات IEEE في علوم الأنظمة وعلم التحكم الآلي) ويستمر الرجوع إليه لأكثر من 45 عامًا.
العالم في ذلك الوقت
ما سبق يعطي فكرة عن الجزء (وإن كان بعيدًا عن الحجم بالكامل!) من العمل الذي قام به فريق مشروع Shakey. للحصول على فكرة عن هذا العمل في سياق اجتماعي أوسع ، دعونا نلقي نظرة على المناخ الفكري والثقافي في ذلك الوقت.
في عام 1970 ، تم نشر مقال كبير عن مشروع Shakey في مجلة Life الشهيرة. يبدو أن الكاتب ، الصحفي براد داراش ، قد ذهب بعيداً جداً في العنوان: "الواقع المذهل والرائع لآلة ذات عقلها". ومع ذلك ، في حين يعتقد البعض أن الروبوتات يمكن أن تستعبد العالم ، كان البعض الآخر يشككون في مثل هذه المقالات. كان هوبرت دريفوس أحد أولئك الذين جادلوا ، من وجهة نظر فلسفية ، بأن مفهوم الذكاء الاصطناعي غير واقعي بشكل أساسي. وفي مكان ما بين Darrach و Dreyfus ، كان هناك أولئك الذين يخشون من أن الروبوتات قد تتولى يومًا ما وظائف بشرية.
مشاركة مجلة Shakey's Lifeاهتز الضيوف
رحب مطورو الروبوت بكل زائر مهتم بعملهم. تقول مراجعة ردود الفعل التي تم الحصول عليها أيضًا الكثير عن حالة العالم في ذلك الوقت. إليك بعض الأمثلة:
- قامت مجموعة من تلاميذ المدارس بزيارة المختبر. سأل المعلم الذي رافقهم ما الذي كان للمهندسين "عمل حقيقي": "هذا الروبوت هو هوايتك ، أليس كذلك؟"
- سأل الجنرال إذا كان يمكن تركيب سكين 36 بوصة على الروبوت.
- زار آرثر كلارك المختبر فور صدور فيلم "Space Odyssey of 2001" ، ولكنه كان أكثر اهتمامًا بالحديث عن مراجعة New York Times للفيلم أكثر من مناقشة مستقبل الروبوتات.
- قاد طالب في المدرسة الثانوية من سياتل إلى مينلو بارك في كاليفورنيا لرؤية Shakey. بعد عقود ، تذكر بيل جيتس أن ما رآه كان مثيرًا للإعجاب.
- سأل مدقق حسابات من الحكومة الأمريكية عما إذا كانت SRI تهتم حقًا بتسليم مليارات "بتات الرزم". تبع هذا السؤال آخرون ، بما في ذلك ما إذا كان قد لوحظ تآكل في أي من هذه القطع.
استكمال مشروع اهتز
تم إغلاق مشروع Shakey في عام 1972 - ليس بسبب نقص الأفكار ، ولكن بسبب نقص التمويل. ما الذي تحقق خلال وجودها؟
كان هناك العديد من الآراء حول هذه النتيجة كما كان هناك أعضاء الفريق ، ولكن يمكن إجراء العديد من التعميمات:
- أصبحت العديد من النتائج الخاصة للمشروع (STRIPS و PLANEX و A * خوارزمية وشكل جديد من تحويل Hough) مساهمة فنية كبيرة.
- بشكل عام ، كان Shakey إنجازًا كبيرًا. كان أول روبوت ذكي متنقل وأول نظام يجمع بين البرمجيات مع الذكاء الاصطناعي والأجهزة المادية.
- لم تصل قدرات Shakey العامة ، من حيث الميكانيكا والبرمجيات ، إلى مستوى التطلعات الأولية. هذا ليس مفاجئًا ، نظرًا للمستوى العالي من المطالبات في البداية. استغرق الأمر عدة عقود لتحقيق بعض الأهداف المعلنة ، بينما لا يزال البعض الآخر بدون حل.
المراجع:
1. "اهتزاز: من الحمل إلى التاريخ". المقالة الأصلية. يتحدث الجزء الثاني من المادة عن التطبيق الإضافي لاكتشافات مشروع Shakey. اذهب إلى
2. "كم يستغرق إعادة روبوت Shakey؟" - محاولة استنساخ Shakey في الظروف الحديثة. اذهب إلىلمعرفة المزيد عن الروبوتات ، قم بزيارة robo-hunter.com:العلوم الشعبية: