 تم تطوير الروبوت المحطم للأرقام القياسية في مختبر الروبوتات المحاكاة الحيوية في معهد ماساتشوستس للتكنولوجيا
تم تطوير الروبوت المحطم للأرقام القياسية في مختبر الروبوتات المحاكاة الحيوية في معهد ماساتشوستس للتكنولوجياهناك ألعاب تهزم فيها منظمة العفو الدولية شخصًا ما. ولكن هناك مهام لا يعتبر فيها الشخص بشكل عام منافسًا. هنا ، تتنافس الروبوتات فقط مع بعضها البعض. يعد تجميع مكعب روبيك مهمة نموذجية من هذا القبيل.
في نوفمبر 2016 ، سجل الروبوت Infineon Technologies AG رقمًا قياسيًا جديدًا لتجميع مكعب روبيك: تم
تجميعه في 0.637 ثانية ، محطماً الرقم القياسي السابق البالغ 0.89 ثانية. لكن المهندسين الأوروبيين فاقهم الطلاب
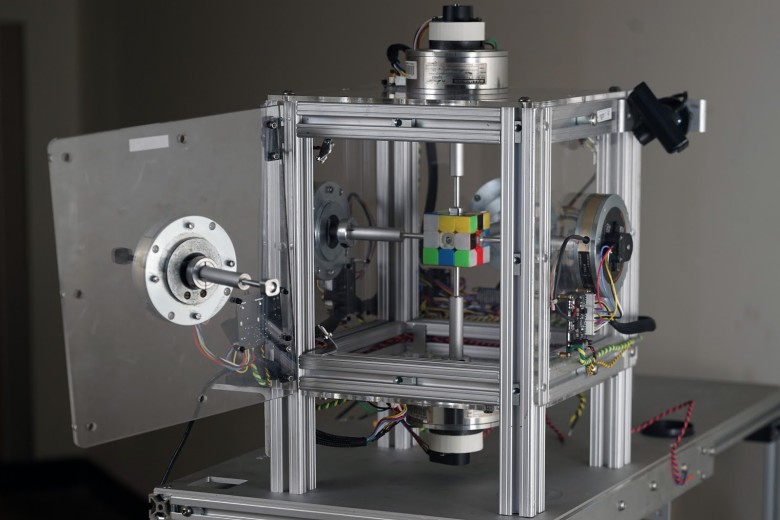
في مختبر الروبوتات المقلدة الحيوية في معهد ماساتشوستس للتكنولوجيا. أكمل الروبوت الخاص بهم المهمة في
0.38 ثانية لا تصدق . هذا هو الوقت "القذر" ، والذي يشمل الضغط على مفتاح "ابدأ" ، والتعرف على الصور وحساب تسلسل الإجراءات. استغرق الجزء الميكانيكي من المهمة نفسها حوالي 335 مللي ثانية. حل مشكلة في
برنامج قائم على
min2phase وإرسال التعليمات - 45 مللي ثانية.
تم تصوير الفيديو في الوقت الفعلي بوضوح ليس لعيون الإنسان. من أجل أن تكون أجهزة الحواس غير الكاملة للشخص قادرة على إصلاح عملية التجميع ، والدماغ البشري البطيء لإدراك ما يحدث ، فمن الضروري إبطاء تشغيل الفيديو عدة مرات على الأقل. بسرعة 0.03x من الواقع ، يصبح هناك شيء واضح.
المطورون على يقين من أن الجهاز قادر على التعامل بشكل أسرع ، ولكن هذا يتطلب تحسينًا دقيقًا لتوقيت الحركات الميكانيكية التي يتم التقاطها على كاميرا عالية السرعة. في الفيديو بسرعة 0.03x (تباطؤ 33 مرة) ، من الملاحظ أنه بعد كل حركة تتحرك وجوه الجمود المكعب ذهابًا وإيابًا قبل التوقف أخيرًا. لذا ، يكتمل دوران 90 درجة في الواقع في حوالي 10 مللي ثانية ، لكن الروبوت يجعل الحركة التالية في غضون 15 مللي ثانية. في هذا الجزء يمكن تحسين العملية بشكل كبير. لكن الروبوت تضاعف تقريبًا الرقم القياسي العالمي السابق مرتين تقريبًا ، وبسبب أخطاء التحسين ، انكسر مكعب أو انفجرت الترانزستورات ذات التأثير الميداني. لذا قررنا ترك الأمر كما هو. ولكن إذا لزم الأمر ، يمكن للطلاب "قطع" 100 مللي ثانية أخرى من السجل.
استخدم التصميم التفاصيل التالية:
- 6 محركات سلسلة Kollmorgen ServoDisc U9 (أربعة N9M4T بمغناطيس نيوديميوم واثنين من UD9-E - لديهم نفس الخصائص والأداء). تم أخذ اثنين منهم من مشروع قديم لذراع ميكانيكية ، وتم شراء الباقي بسعر رخيص على موقع eBay. يتم إرفاق مستشعر ضوئي US 2000 الرقمي ، مع eBay أيضًا ، بكل محرك. على الرغم من أن هذه المستشعرات توفر دقة مفرطة لهذه التجربة ، إلا أنها تمكنت من شرائها مقابل 14 دولارًا للقطعة - جديد ، وهو مجرد سعر رائع. صحيح ، لإرفاق المستشعرات بالمحركات ، كان عليّ العبث قليلاً.

- 6 محركات ذات محرك 12 فولت. تعمل وحدات التحكم STM32F303K8 هنا. يتم تجميع الألواح على ترانزستورات 100 فولت. ولكن لسبب ما ، عند 60 فولت ، انفجر أحدها مرتين عندما توقف المكعب. البرامج الثابتة للتحكم .

تتم مزامنة / تنسيق الحركات بين وحدات التحكم الستة عن طريق لوحة منطقية بسيطة (AND Board) ، والتي تتلقى إشارة من كل محرك حول بداية / نهاية الحركة وترسل إشارة حول بداية آمنة للمحرك التالي في قائمة الانتظار.

- تصوّر كاميرتا بلاي ستيشن عين ثلاث وجوه لكل منهما. تتم معالجة الفيديو بسرعة 187 إطارًا في الثانية في Linux مع زمن انتقال منخفض جدًا مقارنة بكاميرات الويب التقليدية. كانت هذه الكاميرات قادرة على الشراء مقابل 7 دولارات. صحيح أن هناك مشكلة مع وجود فرق واضح بين المربعات الحمراء والبرتقالية ، لذا قام الطلاب بالغش قليلاً - وقاموا بطلاء المربعات البرتقالية بطلاء أسود.
- 1 مكعب روبيك. واحدة من أرخص .
لم يكن عبثا أن تم أخذ المكعبات رخيصة ، لأنه خلال التجربة انكسرت عدة قطع (انظر الفيديو). يكتب المهندسون أن أحد الحيل لكل شيء يعمل بشكل جيد هو توفير ضغط محكم حقًا لجميع تفاصيل المكعب. إذا تحركت الأجزاء بعيدًا عن بعضها البعض ، فيمكن للأجزاء الخارجية أن تدور للخارج عندما تحاول تدوير المستويات المركزية بسرعة.
عادة ما يتطلب تجميع مكعب مفكك جيدًا 19 إلى 23 خطوة. بعض الحلول تضيف أسرع من غيرها (الأسرع تتكون من 21 خطوة). لذا إذا كنت محظوظًا ، فسيتم حل المهمة بحوالي 30 مللي ثانية بشكل أسرع.