مرحبًا أيها المجتمع! المقالة عبارة عن "دراجة" كلاسيكية ، ولكن يمكن أن تكون مثيرة للاهتمام بالنسبة للمبتدئين في مجال الإلكترونيات والروبوتات.
كما تعلمون ، يتم تجميع أصغر وأبسط الروبوتات الآن على وحدات التحكم الدقيقة مثل Atmega أو STM. هنا في المقالة ، أنا في الأساس لا أتناول مستوى أجهزة الكمبيوتر المصغرة مثل Raspberry.
في الروبوتات ، بالإضافة إلى الحركات ، من الضروري في بعض الأحيان إجراء تقييم على الأقل للمساحة المحيطة. لذلك - لم أجد جهاز استشعار ضوئي ضوئي لأعضاء الكنيست البسيط. إن "مستشعر الخط" الشعبي ليس كذلك. يوفر البحث على Giktims والموارد المماثلة روابط إلى الكاميرات ، ولكنها سريعة جدًا بالنسبة لأعضاء الكنيست البسيط ومقال واحد حول استخدام 8 أجهزة كمبيوتر. المصابيح كصمامات ضوئية.
لذلك ، ولدت الفكرة لصنع مستشعر نقطي بدائي - protoglaze ، عن طريق القياس مع الكائنات الحية الأولى. كل ما هو مكتوب أدناه تم إجراؤه فقط للترفيه الخاص بي ، مع الحد الأدنى من النفقات والتطبيق العملي لم يكن من المفترض. دع الدراجة مرة أخرى ، ولكن فيما يتعلق
Nipkov وآباء التلفزيون الميكانيكي.التفاصيل تحت القطع ...
كان الترانزستور الضوئي BPW85C متاحًا. من المنطقي أن يتم تصنيع ماسح الرادار مع التركيز على جهاز الاستشعار الضوئي.
الخيار 1
للتركيز ، يمكنك استخدام مرآة مكافئة دوارة ، وترانزستور ضوئي ثابت لوضعه في البؤرة. لم يكن لدي مرآة ، ولكن كان هناك صفيحة مسطحة من الصفيح. بعد 3 ساعات من العمل بيدي ، تم الحصول على مرآة من 10 سنتات وشكل مكافئ تقريبًا.
مرآة مكافئ. من الصعب أن تأخذ مرآة))بعد تجميع التركيب الدوار ، وجد أن الضوء يدخل بطريقة ما ليس فقط من المرآة ، ولكن أيضًا من جميع الجوانب. لا يمكن تغطية المستشعر بالشاشة ، حيث يتم إغلاق معظم العرض أيضًا. كان علي أن أرفض.
الخيار 2
للتركيز ، استخدم عدسة تجميع ، وجمع نظير للكاميرا.
لم يتم العثور على عدسات للقطر المطلوب (12 ملم) ؛ كان علي استخدام يدي لإخراجها من قرص مضغوط (يوجد بلاستيك بخصائص بصرية جيدة).
نعم ، هذه طفولة قاسية ، ألعاب خشبية. اتضح ، التركيز مقبول ، النقطة البؤرية أصغر حتى من بلورة الترانزستور الضوئي.
عرض العدسةتركيب دوار - على محرك سائر صغير 15 ملم. معدات تخفيض الحزام من نفس السلسلة - "من لا شيء". زاوية الدوران إلى اليسار واليمين تقارب 45 درجة.
نظرة عامةمن خلال برنامج التشغيل A4988 ، يتحكم Amtega328P MK في محرك السائر. يتم استخدام وضع نصف الخطوة ، ويتم قراءة الإشارة لكل نصف خطوة من ADC MK. قبل ADC ، يوجد أيضًا مكبر للصوت على الترانزستور ، لأن إشارة الترانزستور الضوئي ضعيفة. يتم نقل البيانات المستلمة بدون معالجة على الفور عبر RS-232 إلى الكمبيوتر. يتم بالفعل إنشاء مخطط إضاءة على الكمبيوتر.
نظرة عامةالإجمالي: أثناء المسح الأفقي. دقة 320 خطًا عند القراءة ، يصعب قياس الدقة الحقيقية ، في الاختبار مع مصدر ضوء نقطة واحدة اتضح 6/320 ، أي حوالي 53 سطرًا لكل نقطية.
ولكن هذا هو النموذج الأول ، والثاني (ل 2 D) سيكون في المقالة التالية.الاختبارات:
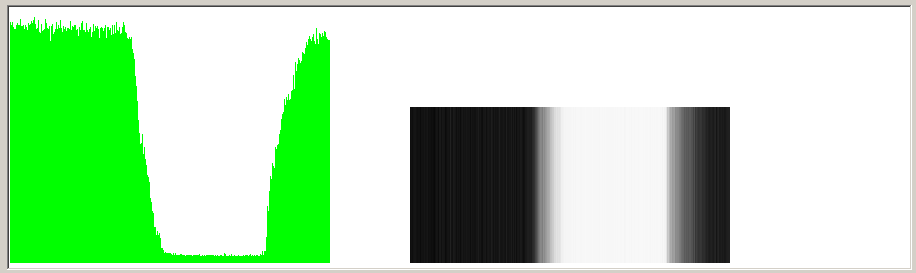 اختبار للإضاءة المختلفة. الرسم البياني الأخضر هو مستوى الجهد في ADC ، والصورة بالأبيض والأسود هي نتيجة تحويل الإشارة التي "يراها" عضو الكنيست.
اختبار للإضاءة المختلفة. الرسم البياني الأخضر هو مستوى الجهد في ADC ، والصورة بالأبيض والأسود هي نتيجة تحويل الإشارة التي "يراها" عضو الكنيست.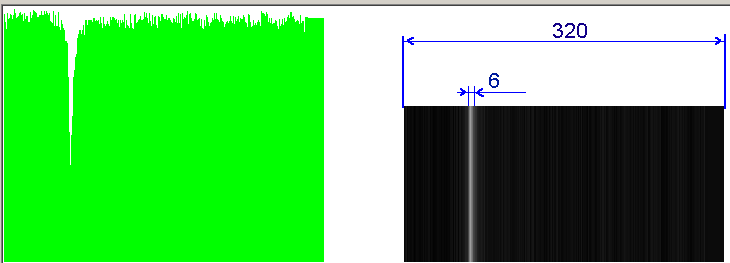 اختبار نقطة واحدة. الدقة الفعلية حوالي 53 سطرًا
اختبار نقطة واحدة. الدقة الفعلية حوالي 53 سطرًا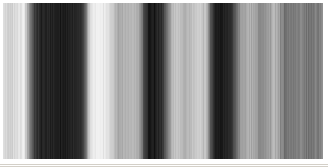
 "إطلاق النار" على بطاريات الأصابع الثلاثة على خلفية خفيفة
"إطلاق النار" على بطاريات الأصابع الثلاثة على خلفية خفيفةسرعة "الفيديو" هي 4 إطارات (دورات) في الثانية ويتم تحديدها من خلال قدرات SD. لتطبيق افتراضي (؟) في روبوت بسيط - يكفي.
الشيء الرئيسي هو أن تصوير الفيديو يستهلك موارد قليلة من وحدة التحكم الدقيقة ، لا تزال هناك إمكانيات لإجراءات أخرى وحتى للتعرف على الصورة ، إذا لزم الأمر.
كانت هناك أيضًا محاولة للقيام AGC (التعرض التلقائي) ، ولكن الربح كان غير خطيًا جدًا. على مكبر للصوت التشغيلي يمكن القيام به في الإصدارات القادمة.
مصادر:
أرشفة مع مصدر CodeVisionAVR وجهاز الاستقبال على VBasic 6
الكسندر