كان BigDog أول روبوت ديناميكي في بوسطن أصبح معروفًا على نطاق واسع. من نواح عديدة ، كان هو الذي "صنع اسم" مؤسس شركته. روبوت للجيش ، مهجور من قبل الجيش ، وأول روبوت بوسطن ديناميكس ، الذي ركله المطورون في الكاميرا.
الآن وضع المشروع حدًا له ، لكنه أصبح أساسًا للتطورات اللاحقة للشركة - الفهد والبقعة الجديدة ، التي أصبحت الفيديوهات سريعة الانتشار.
اليوم سنحاول فهم جهاز BigDog من كلمات مطوريه. نشر المؤلفون المقال الأصلي في عام 2008 ، ولكن لا يزال (نوعًا من) لم يُترجم إلى اللغة الروسية. يخبر عن المكونات الرئيسية للروبوت والخوارزميات التي تنسق مشيه. الهدف من مشروع BigDog هو إنشاء أجهزة قائمة بذاتها مع أرجل مع القدرة على التحرك فوق التضاريس الوعرة. يجب أن تكون متفوقة على المركبات ذات العجلات والمتتبعة. يجب أن يذهب النظام المثالي في أي مكان يمكن أن يذهب فيه الشخص أو الحيوان ، يعمل لساعات ويحمل الوزن على شكل وقود وحمولة خاصة به. إنها ذكية بما يكفي لعبور التضاريس مع الحد الأدنى من التدخل والسيطرة البشرية.
ساعد في إنشاء روبوتات BigDog على اتخاذ عدة خطوات لتحقيق هذه الأهداف ، على الرغم من أنه لا يزال هناك الكثير من العمل في المستقبل.
لدى BigDog أنظمة على متن الطائرة توفر الطاقة والطاقة وجمع البيانات البيئية والرصد والاتصالات. يتم توفير الطاقة من خلال ICE ثنائي الشوط مبرد بالماء ، والذي يوفر حوالي 15 حصان. إنه يقود مضخة توفر الزيت الهيدروليكي من خلال نظام من الفلاتر والمشابك والبطاريات لمحركات الأرجل الروبوتية. المحركات عبارة عن أسطوانات هيدروليكية منخفضة الاحتكاك يتم التحكم فيها بواسطة صمامات مؤازرة ذات مرحلتين. يحتوي كل مشغل على أجهزة استشعار تراقب موضع المفاصل وقوتها. تحتوي كل رجل على 4 مشغلات هيدروليكية تغذي المفاصل. يقوم مبادل حراري مركب على جسم BigDog بتبريد الزيت ، ويقوم المبرد بتبريد المحرك لضمان التشغيل المستقر.
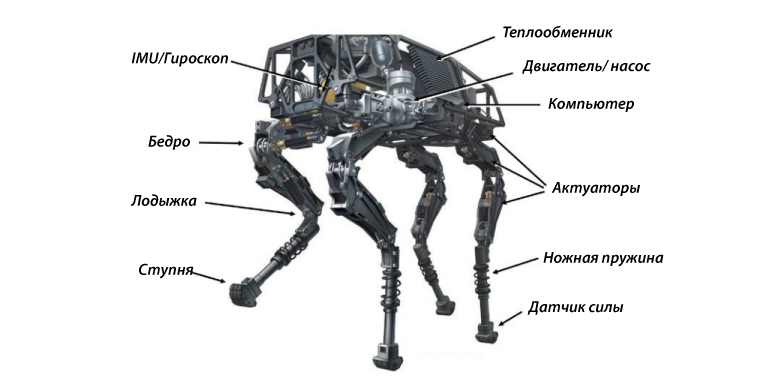 عناصر التصميم الرئيسية لـ BigDog
عناصر التصميم الرئيسية لـ BigDogيتحكم الكمبيوتر المدمج في سلوك BigDog ، ويتحكم في أجهزة الاستشعار وهو مسؤول عن التواصل مع المشغل عن بعد. كما يسجل أيضًا كمية كبيرة من البيانات الهندسية لتحليل الأداء وتحليل الأخطاء والدعم التشغيلي.
يحتوي BigDog على حوالي 50 مستشعرًا. تقيس أجهزة الاستشعار بالقصور الذاتي موضع الجسم وتسارعه ، وتقيس أجهزة استشعار المفاصل حركة وقوة المحركات المفصلية. يعالج الكمبيوتر الموجود على متن الطائرة المعلومات من جميع هذه المستشعرات لإعطاء تقدير لكيفية تحرك الروبوت. تتحكم مجموعة أخرى من المستشعرات في توازن BigDog: الضغط الهيدروليكي والتدفقات ودرجة الحرارة وسرعة المحرك وما إلى ذلك.
يقوم الكمبيوتر الموجود على متن الطائرة بوظائف مراقبة منخفضة وعالية المستوى. يتحكم نظام منخفض المستوى في وضع الماكينة والتغذية في المفاصل. ينسق المستوى العالي موضع الساقين لتنظيم سرعة الجسم وموقعه وارتفاعه أثناء الحركة. كما يتتبع قوة التفاعل مع الأرض لضمان حركة ثابتة.
لدى BigDog العديد من خيارات الحركة. يمكنه النهوض ، والانحناء ، والمشي مع مشية زحف ، والمشي ، ورفع ساق واحدة فقط في كل مرة ، والهرولة والعدو. السرعة مع مشية زحف هي 0.2 م / ث ، للوشق - 1.6 م / ث ، للتشغيل - 2 م / ث (في ظروف المختبر ، كان مؤشر السرعة القصوى 3.1 م / ث). بالإضافة إلى ذلك ، يمكن للروبوت القفز 1.1 متر.
عادة ما يتم التحكم في BigDog بواسطة عامل بشري يعمل مع وحدة تحكم متصلة بالروبوت عبر أجهزة الراديو IP. يوفر المشغل تحكمًا عالي المستوى في الحركة والسرعة. يمكنه أيضًا طلب الروبوت لبدء تشغيل المحرك أو إيقافه ، والوقوف ، والجلوس ، والمشي أو الركض.
[حول كيفية تطوير خوارزمية التنقل المستقلة للروبوت ، يمكنك القراءة هنا ]تم دمج نظام رؤية ستيريو و Lidar في الروبوت. يتكون نظام الرؤية الاستريو الذي طوره مختبر الدفع النفاث من زوج من الكاميرات الاستريو وكمبيوتر وبرمجيات مرئية. يتم استخدامه للحصول على شكل ثلاثي الأبعاد للمناظر الطبيعية أمام الروبوت وإيجاد طريقه. هناك حاجة إلى Lidar حتى يتمكن BigDog من متابعة شخص دون أوامر مشغل إضافية.
السيطرة على المشي
للتحرك بالسرعة البشرية ، يستخدم BigDog مشية هرولة متوازنة ديناميكيًا. إنه يوازن باستخدام السرعة الجانبية والتسارع ، والذي يحدده السلوك المدرك للساقين مع أجهزة الاستشعار بالقصور الذاتي.
ينسق نظام التحكم BigDog الحركات والتفاعلات الأرضية للروبوت ، ويستجيب للأوامر الوضعية الأساسية. تقوم وحدة التحكم بتوزيع الحمل بين الأرجل لتحسين قدرتها على التحمل. يتم الاحتفاظ بالحمل الرأسي على الأطراف بقدر الإمكان ، وتولد الأرجل الفردية تفاعلات أرضية موجهة نحو الوركين لتقليل الاحتكاك.
تؤدي خوارزمية تنسيق المشي المسؤولة عن الاتصال بين الأطراف إلى تحريك الساقين. يتم تنسيقه بواسطة نموذج ساق افتراضي. يمكن تمثيل مخطط التحكم في المشي العام BigDog على النحو التالي:
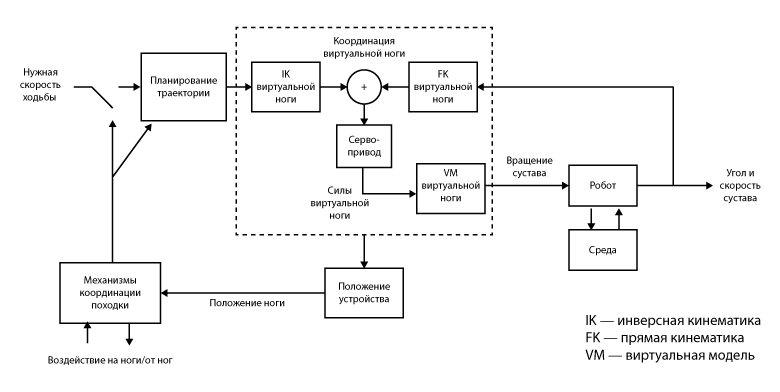 BigDog نمط التحكم في المشي
BigDog نمط التحكم في المشيقمنا بتطوير خوارزميات للمشي للأراضي الوعرة واختبرناها في النمذجة الفيزيائية قبل الاختبار على الروبوت. يمشي روبوت محاكاة على طول المنحدرات بزاوية تصل إلى 60 درجة. تختلف خوارزمية حركتها اعتمادًا على ما إذا كانت تسير على سطح مستو أو على منحدر. بالإضافة إلى ذلك ، فإنه يأخذ في الاعتبار العقبات غير المتوقعة في الطريق ، مثل الحجارة أو الحفر.
تم استخدام النمذجة الفيزيائية لتطوير خوارزميات المشي.يستخدم نظام التحكم معلومات من جهاز الاستشعار المفصلي لتحديد ما إذا كانت "الأرجل" موجودة حاليًا على الأرض وتحديد الحمل على كل طرف ومحرك الأقراص. تتحكم خوارزمية الحالة في موضع الجسم ، وتنسق حركيات الأطراف مع قوى رد فعل الساقين الملامسة للأرض. تطبق خوارزمية الحالة الحركة الصحيحة للأرجل على سطح غير مستوٍ. يسمح لك هذا بالتحكم في المنعطفات والخطوة والارتفاع للجسم بالنسبة للأرض ، وبالتالي تمكين BigDog من التكيف مع التغيرات في المناظر الطبيعية دون أجهزة استشعار ذات مستوى أعلى من إدراك التضاريس.
يتكيف BigDog مع التضاريس بطريقتين. ينظم ارتفاع الجسم وموقفه من المناظر الطبيعية ويتحكم في مكان وضع قدميك. عند الصعود والهبوط من المنحدرات ، يميل جسم الروبوت. المنحدرات الحادة (أكثر من 45 درجة) التي يتغلب عليها الروبوت عن طريق تصحيح المشية واستخدام خطوات أصغر.
في نهاية المقال ، يشكر المؤلفون جميع الأشخاص البالغ عددهم 23 شخصًا من فريق BigDog ويشاركون الخطط للمستقبل: لتقوية جسم الإنسان الآلي ، وجعل BigDog مستقلًا وجعل عمله أكثر هدوءًا (محرك البنزين يصدر ضوضاء مثل دراجة نارية). النقطة الأخيرة ، كما أظهر الوقت ، ظلت مشكلة خطيرة.المزيد عن الروبوتات في robo-hunter.com: