إن دوائر الروبوتات هي بالتأكيد نجاح هذه الأيام. Lego و arduino وخدوش والمزيد متاح للأطفال الحديثين (أنا متأكد من أن الكثير مثلي غيور من الطفل الحالي في هذا الصدد). بصفتي مدرسًا للروبوتات ، قررت مشاركة بعض المواد التي جمعتها على مدار عامين من العمل ، وهي روبوت بسيط إلى حد ما والعديد من الأنشطة معه.
أستخدم هذه الوحدات في الفصل الدراسي لأشرح للأطفال مبادئ تشغيل برنامج تشغيل المحرك ومستشعر الخط وأجهزة تحديد المدى. الأطفال الذين تجاوزتهم دراسة هذا الروبوت قد تعلموا بالفعل كقاعدة لمدة عام ولديهم الحد الأدنى من الأفكار حول Arduino والمحركات والهندسة الكهربائية بشكل عام. هناك العديد من المشاريع على الإنترنت مع هذه المكونات ، ولكن هناك شيئين حفزني على تطوير جهازي - أردت استخدام مقصورة لأربع بطاريات AA وأن أكون قادرًا على إرفاق أي مستشعر تقريبًا بأمان إلى الروبوت (هناك العديد من فتحات التثبيت الإضافية لهذا في التصميم).

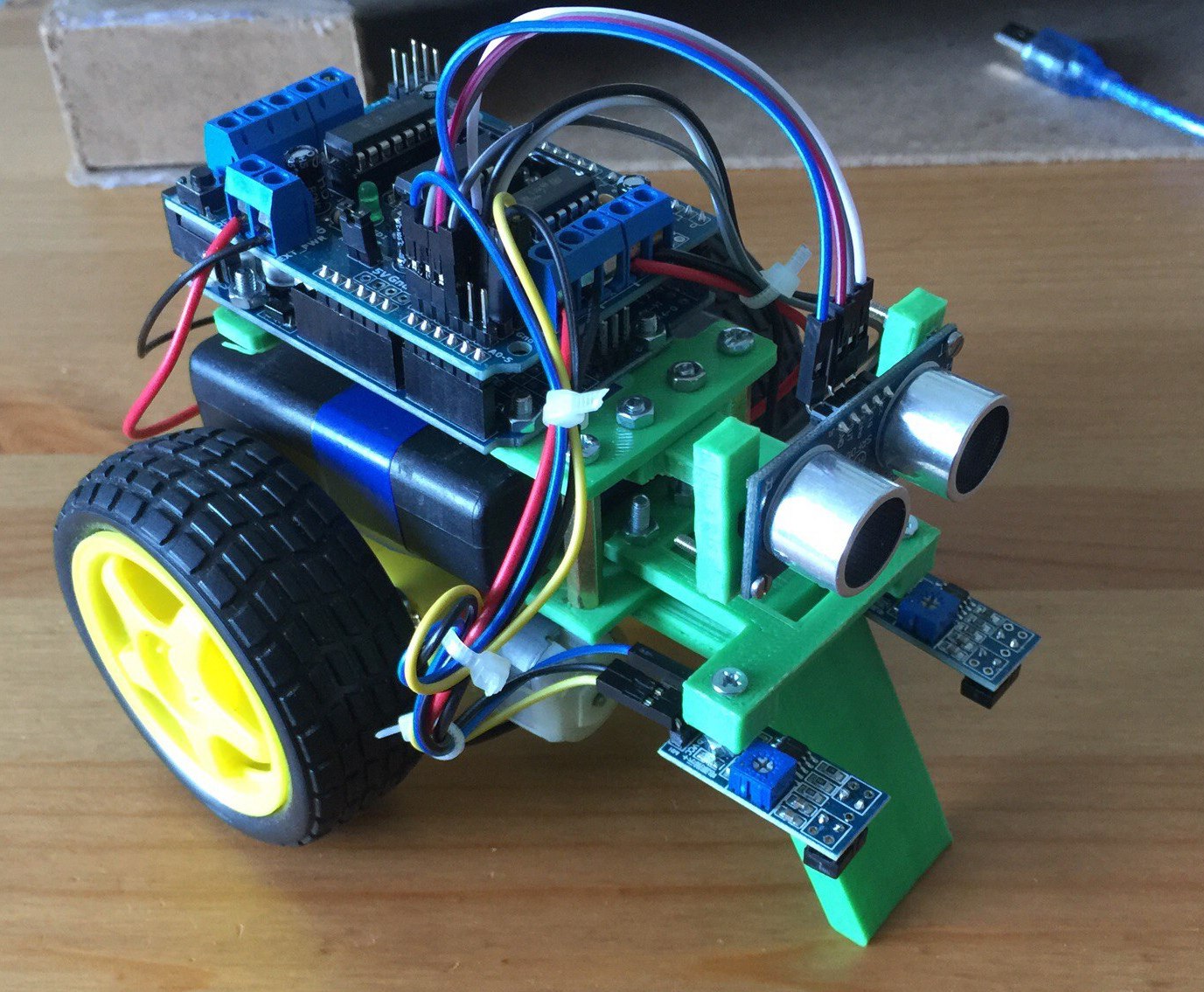
يتم التحكم في الروبوت عن طريق لوحة Arduino Uno مع درع المحرك l293d ، من المستشعرات التي قمت بتثبيت جهاز تحديد المدى HC-SR04 وجهازي استشعار tcrt5000 (لديها كلا من الإخراج الرقمي والتناظري).
يتكون جسم الروبوت من 3 أجزاء (بدون احتساب التركيبات الاختيارية لأجهزة الاستشعار) ، والتي تتم طباعتها على طابعة ثلاثية الأبعاد. للتجميع ، ستحتاج إلى مثبتات M3 ، لقد وصفت جميع العناصر الضرورية في مستند يحتوي على ملفات لطابعة ثلاثية الأبعاد.
تمت برمجة الروبوت ، سواء في بيئة Arduino IDE القياسية (الأطفال الأكبر سنًا) وفي برنامج miniBloq (للمجموعات الأصغر سنًا). بالنسبة للبيئة القياسية ، يتم استخدام مكتبة AFMotor ، وهي ضرورية للعمل مع درع محركات المحرك. للعمل في miniBloq ، تحتاج إلى تحديد معدات الروبوت "ta-bot v1" باستخدام نفس برنامج التشغيل في القسم.
بوجود جهاز تحديد المدى ومستشعرات الخطوط على متن الطائرة ، فإن الروبوت مناسب للمشاركة في المسابقات في العديد من التخصصات ، ولكن تم إنشاؤه فقط للتدريب ، ولن يعمل على الفوز بجوائز.
الفصول التي يمكن عقدها معه:
- العمل مع سائق المحرك. دوران العجلة في اتجاهات مختلفة وبسرعات مختلفة.
- مناورات بسيطة. الركوب في دائرة ، الركوب في شكل ثمانية (في هذه الفصول ، كقاعدة ، عليك اختيار الوقت والسرعة اللازمين عدة مرات للحصول على رقم معين).
- مستشعر الخط. مبدأ العمل. نقل قراءات أجهزة الاستشعار إلى جهاز كمبيوتر (مراقبة المنفذ).
- ركوب في خط مع جهاز استشعار خط واحد.
- ركوب خط مع اثنين من أجهزة الاستشعار خط.
- مكتشف المدى. مبدأ محدد المدى. نقل محدد المدى إلى الكمبيوتر.
- يركب حول الغرفة مع جهاز ضبط المسافة. يتقدم الروبوت إلى الأمام لمواجهة عقبة ، بمجرد أن يتجه إلى الجدار ، فإنه يتحول.
- ابحث عن العدو (كما في robosumo). يتم وضع روبوتين في دائرة ويبدأان في الدوران بحثًا عن العدو باستخدام محدد المدى.
في المجلد الذي يحتوي على التفاصيل ، يمكنك أيضًا العثور على العديد من الفصول النهائية من القائمة أعلاه.