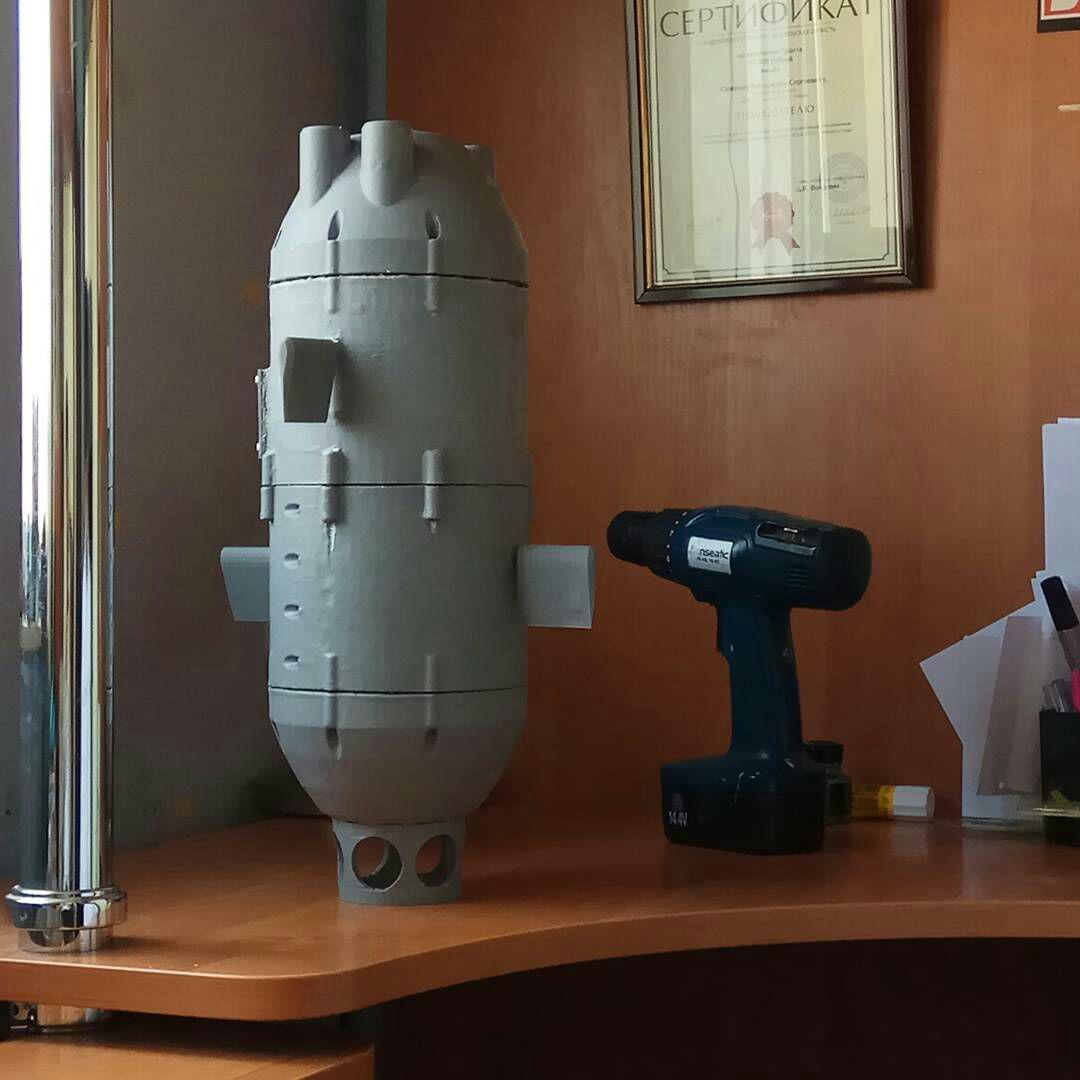
مرحبًا بالجميع ، رأيت ذات مرة أن الغواصات ذات المدى الطويل ، والوظائف الأقل أو أقل احتمالًا وأقل من iPhone الجديد ليس للبيع ، وقررت أن أفعل ذلك بنفسي.
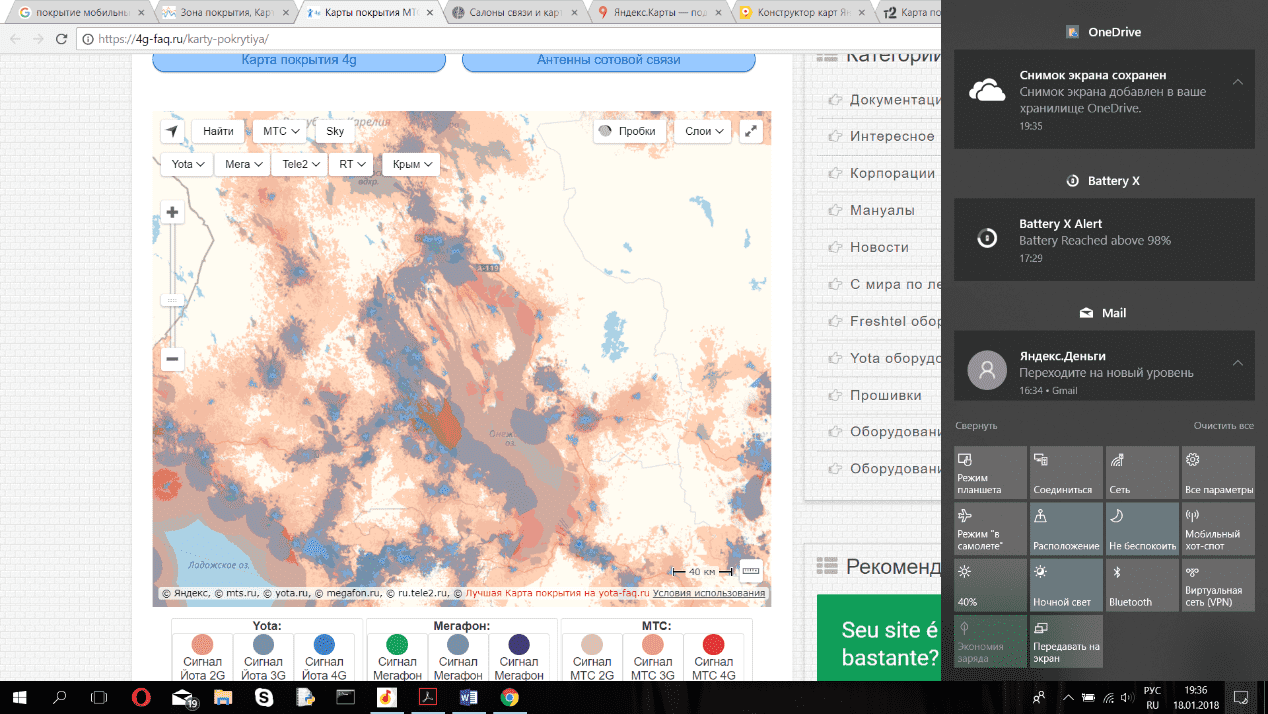
يتم التحكم فيه عبر الإنترنت ، والآن الإنترنت عبر الهاتف النقال يغطي مساحة كبيرة من روسيا. البرك الصغيرة مغطاة بالكامل بها ، ومن شواطئ الإنترنت الكبيرة هناك عشرات الكيلومترات من الساحل.
كما أعلن Elon Musk عن إنشاء شبكة إنترنت عالمية.
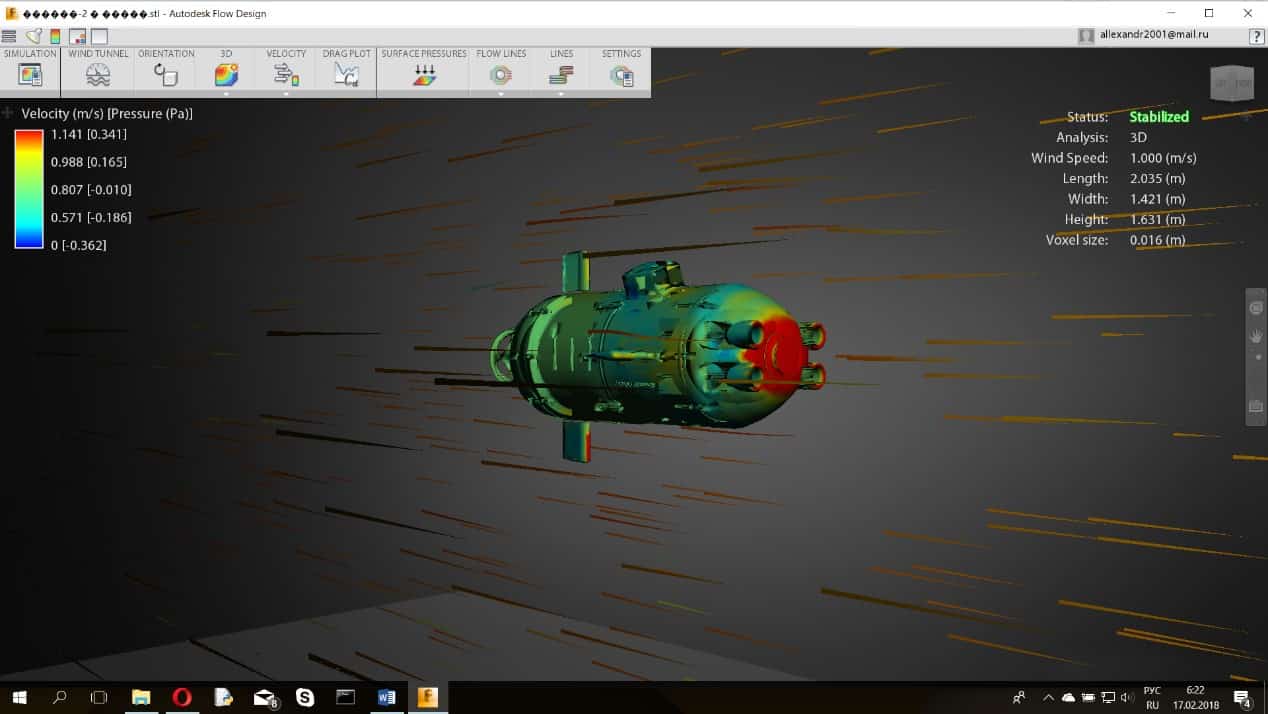
قررت طباعة القارب على طابعة ثلاثية الأبعاد ، الموديلات مصنوعة في البوصلة_3 d. الرمز مكتوب في بيثون 3.
رابط إلى جيثب .
المعدات والمواد
• طابعة ثلاثية الأبعاد
• راسبيري باي كمبيوتر واحد
• 4 جرام مودم (قطعتين)
• لابتوب (قطعتان أول - مرسل ، ثاني - سيرفر)
• المحركات المؤازرة
• كاميرا ويب
• المحرك
• بطاريات الرصاص
• أخرى (مرحلات ، لحام حديد ، حساسات ، مواد لاصقة ، دهانات ، مواد مانعة للتسرب ...).
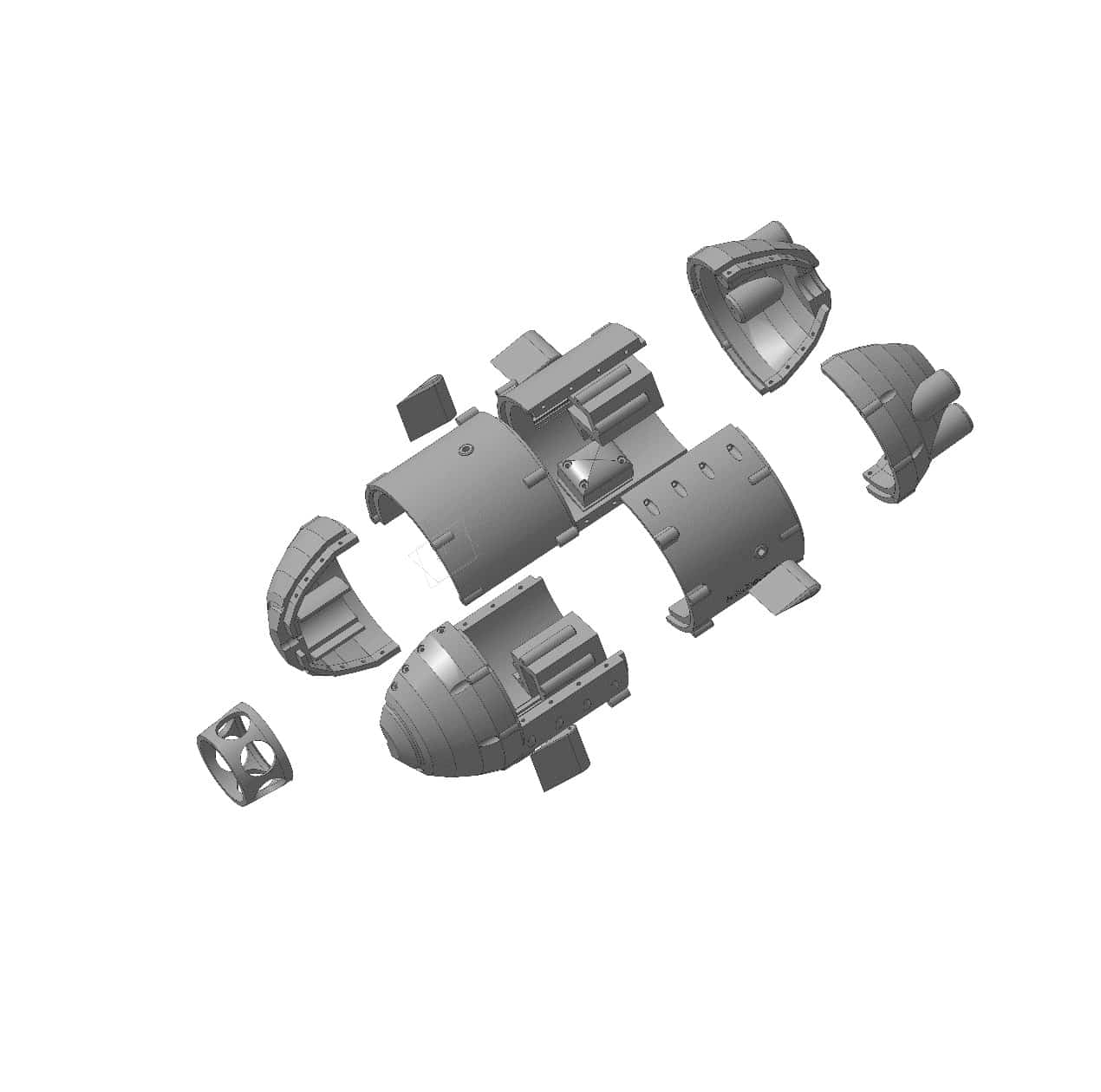
التفاصيل
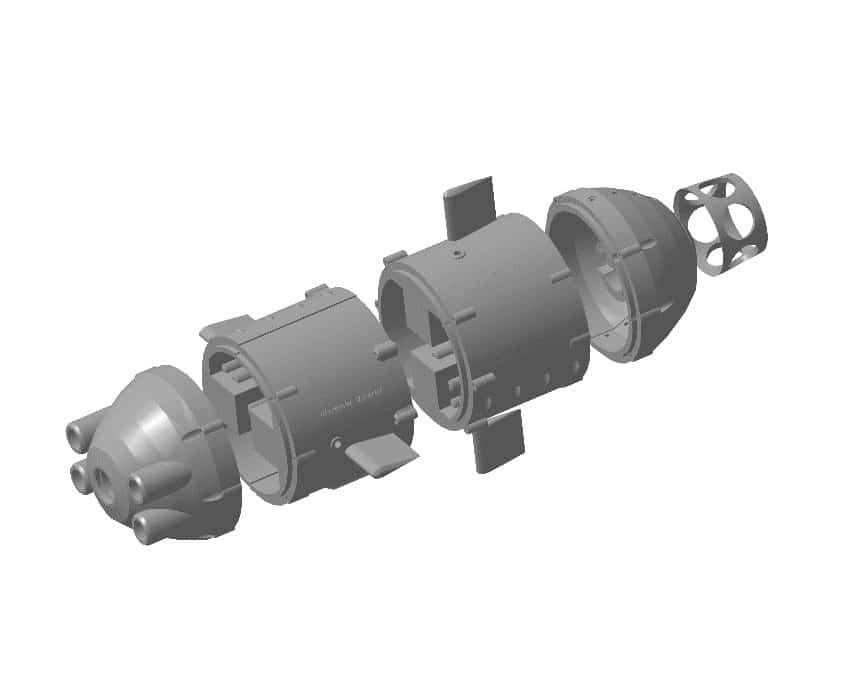
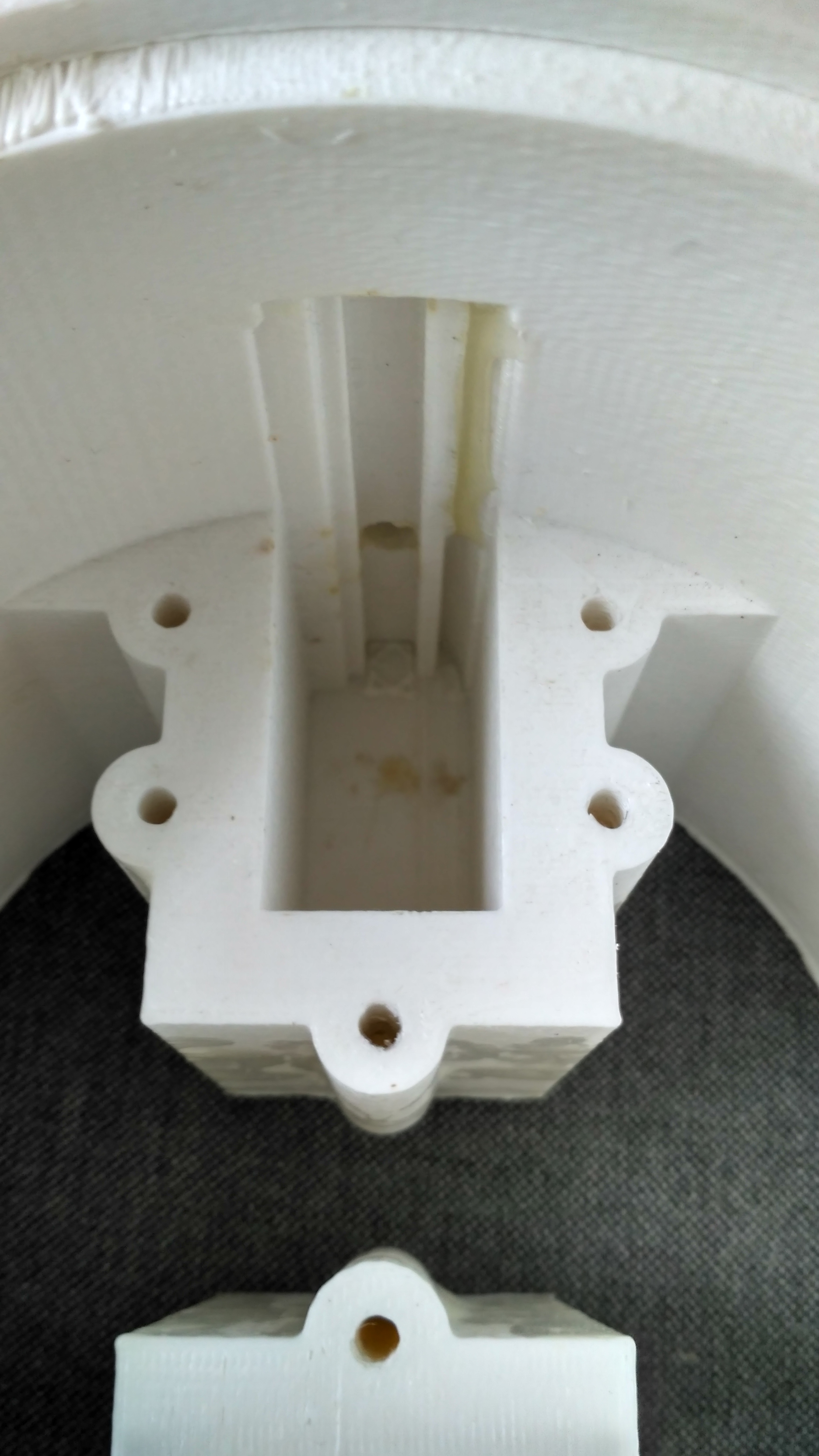
كما ذكرنا من قبل ، يتم طباعة التفاصيل على طابعة ثلاثية الأبعاد بطبقة 0.3 مم بفوهة 0.4 مم
على طاولة ألومنيوم مع ركيزة من الغراء bf2 من أجل التصاق أفضل ، تمت طباعة أطول التفاصيل حوالي 14 ساعة. رسم التجميع السفلي.
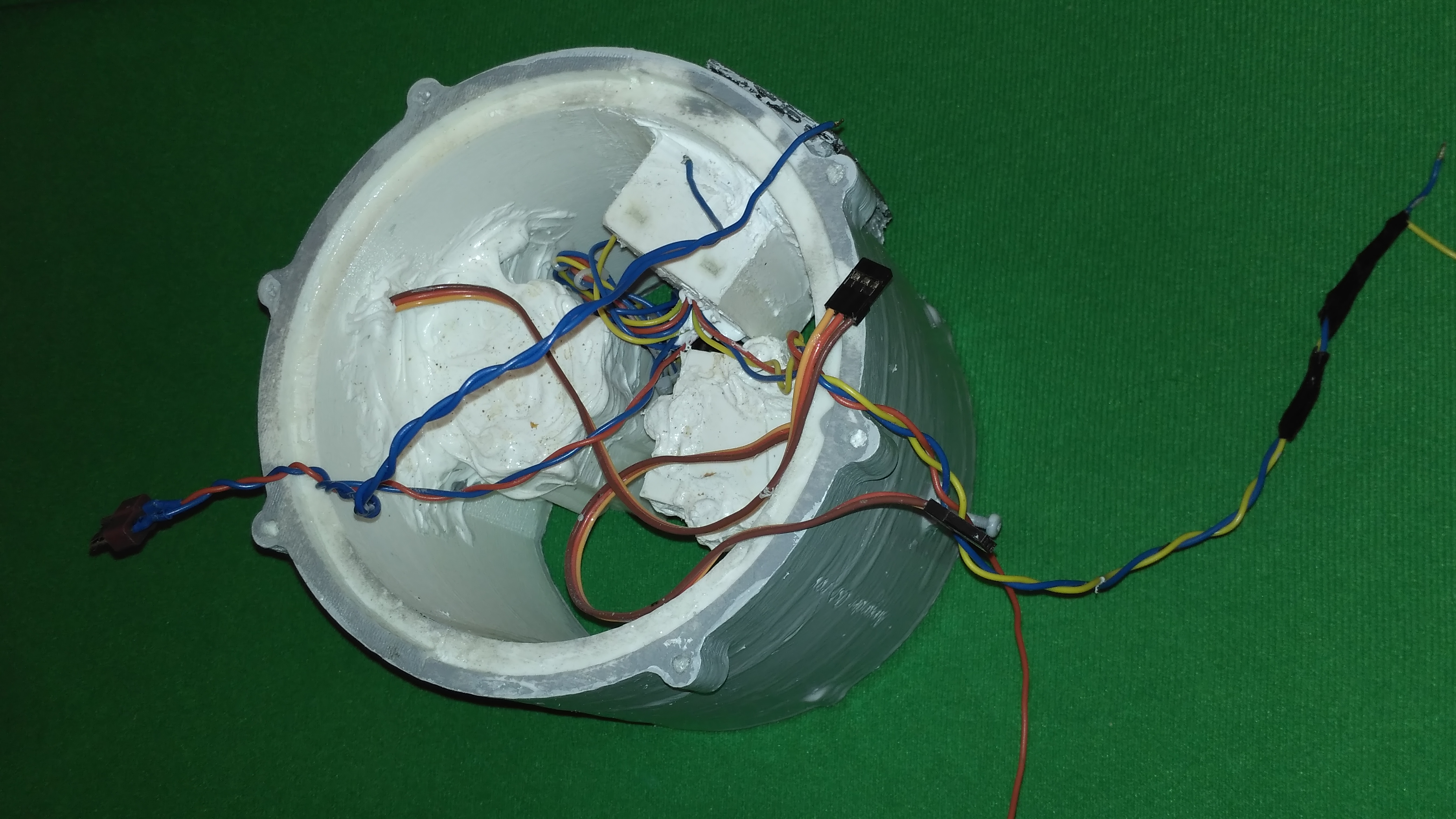
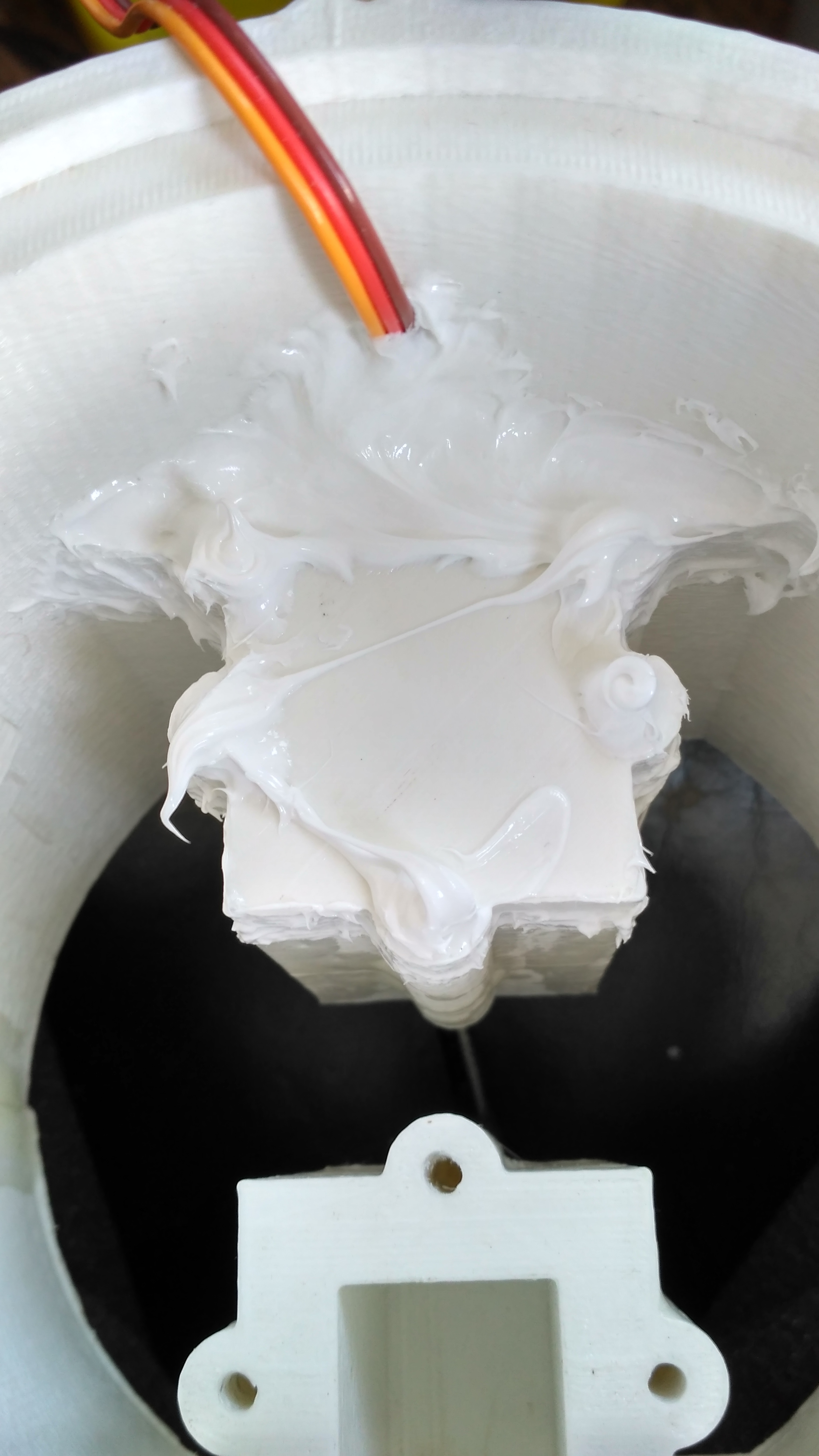
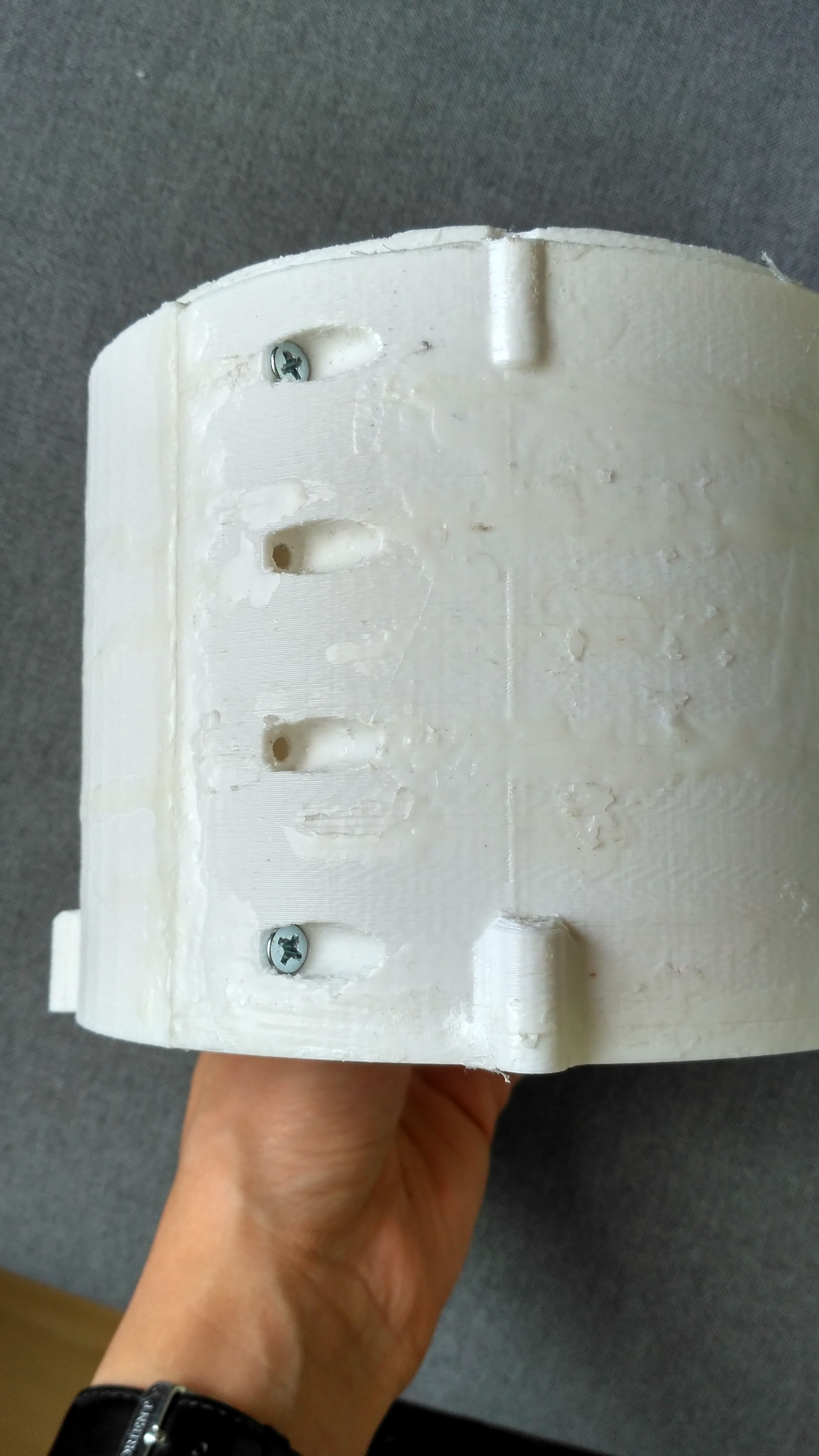
ضيق
للضيق ، يتم إغلاق المحركات المؤازرة ومحرك BC الرائد بمانع تسرب السيليكون والشحم. القارب نفسه ، بسبب حجم أجزائه وميل بلاستيك ABS إلى الانكماش (تغيير الحجم بعد الطباعة) ، في بعض الأماكن ، تتشقق هذه الأماكن مع الغراء للبلاستيك ، في أماكن مانعة للتسرب سيليكون المفاصل لأحواض السمك.
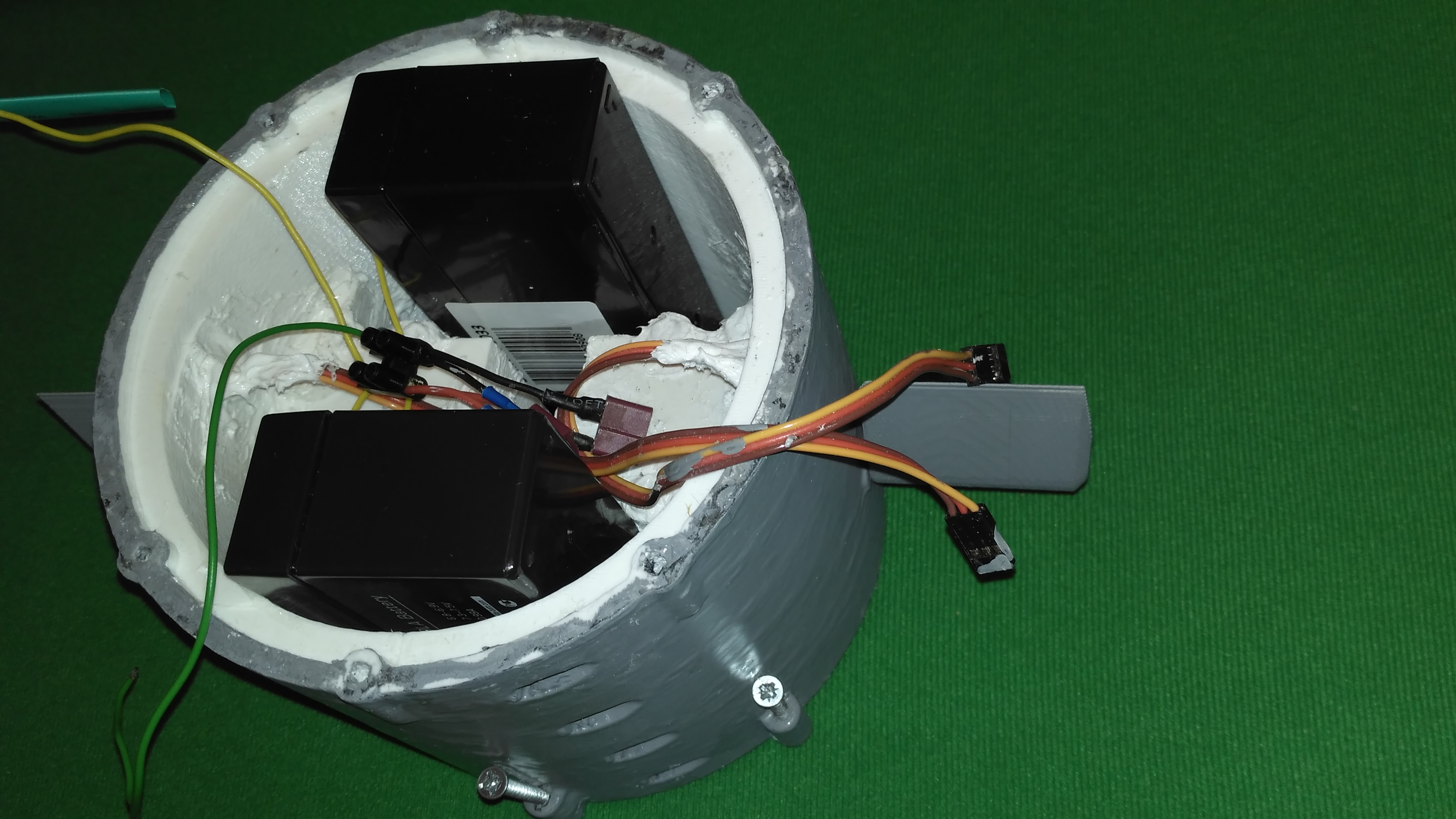
التغذية
كمصدر للطاقة - بطاريتان رصاصيتان رصاصيتان 6 فولت متصلتان بسلسلة قادرة على توصيل 3.3 أمبير / ساعة ، يتم استخدام بطاريات الرصاص الحمضية لأنها أرخص ، وهناك حاجة إلى توجيه عدد أقل من اتصالات الشحن خارج القارب ، كما أنها ثقيلة (القارب ضخم جدًا ومتوسطه يجب أن تكون الكثافة حوالي 1000 كجم / م ** 3).
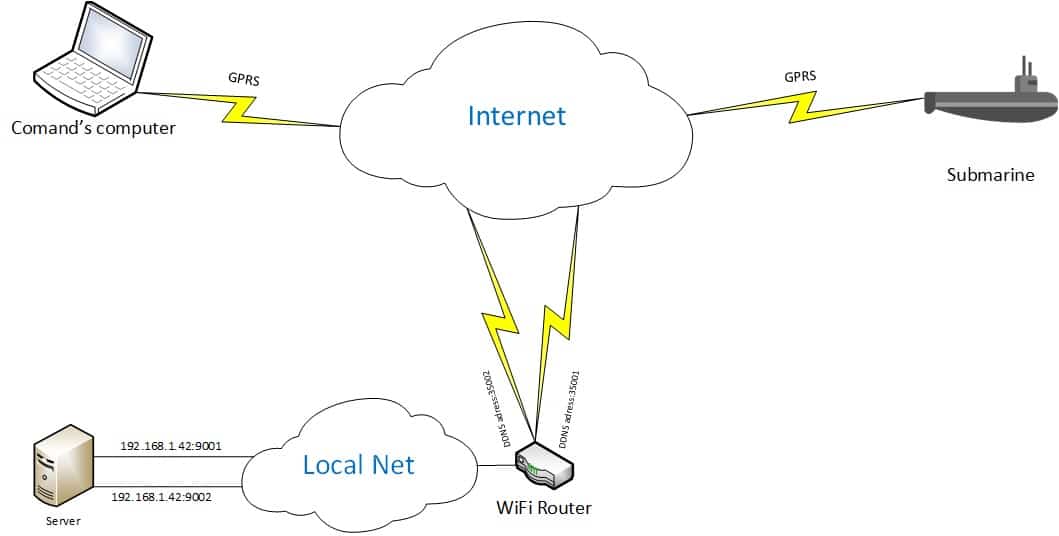
نقل البيانات
الآن حول الشيء الرئيسي ، نقل البيانات.
نظرًا لأن الماء يمتص EMV ، يجب إحضار المودم إلى الأعلى ، بحيث يعمل القارب مع تعويم.
في الشبكة المحلية ، في المنزل ، يتم تثبيت خادم ينقل كل شيء يصل إليه من عنوان إلى آخر. في هذه اللحظة ، ينقل القارب الفيديو ، ويسيطر الكمبيوتر المحمول على التحكم. كل هذا منظم من خلال المقابس.
نظرًا لأنني أردت أن أفعل أكبر قدر ممكن من أجل جعلها أكثر إثارة للاهتمام
، وإعادة اختراع العجلة ، فقد قمت بنقل الفيديو بنفسي ، كما قلت بالفعل ، لذلك بدون اختراع أي شيء أفضل ، قررت عدم نقل الفيديو ، ولكن الإطارات بتنسيق jpg. يتم إرسال صورة واحدة ، ثم يتم تسميم كلمة التوقف "Stop" ، وبما أنها لا تحدث بتنسيق jpg ، فإن الرمز يفصل بسهولة مكان ووقت عرض الصورة.
while bytes('stop','utf-8') not in data: image_result.write(data)
تشغيل الصور واستقبال الكاميرا باستخدام برنامج opencv. لا يوجد ضغط حتى الآن ، لذا فإن التأخير يصل إلى 9-13 ثانية. تتم كتابة أزرار التحكم باستخدام Tkinter.
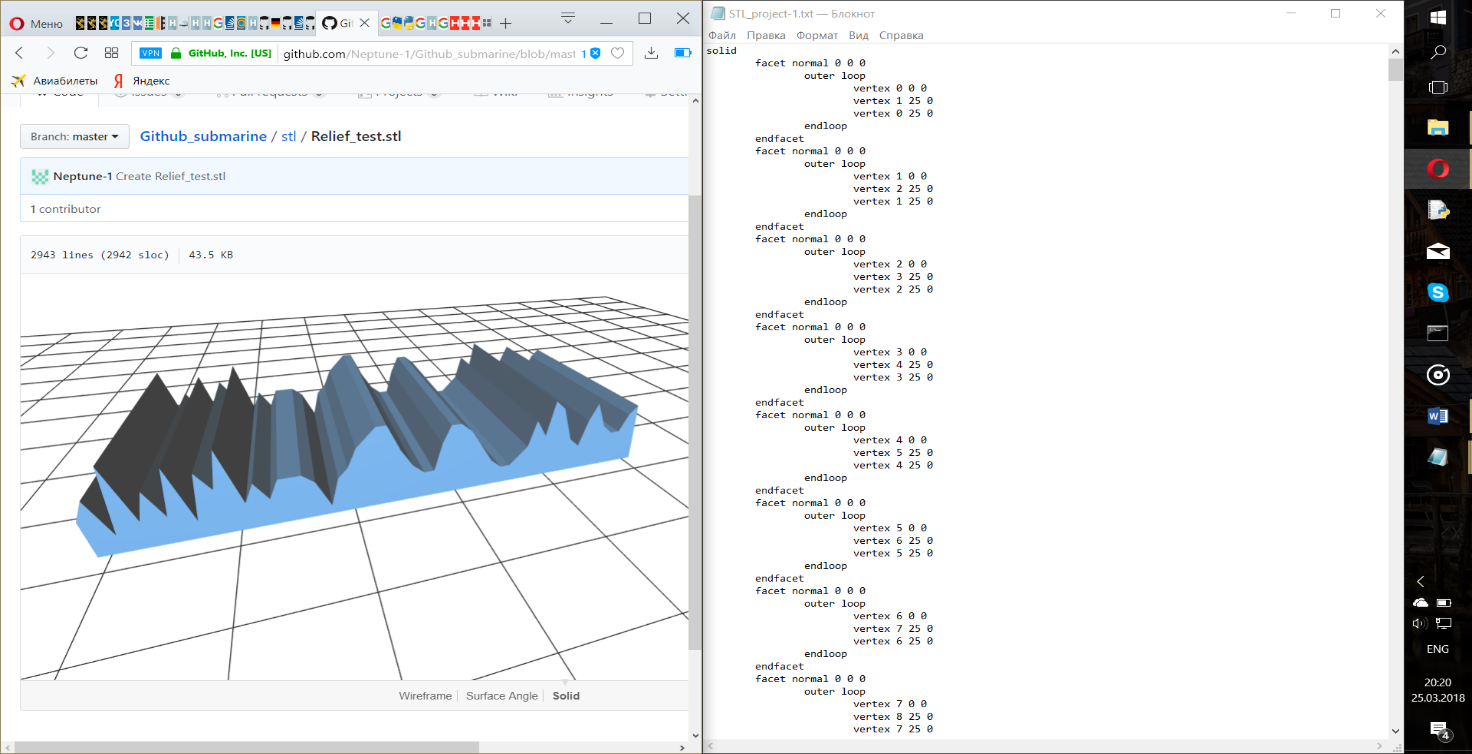
نموذج القاع ثلاثي الأبعاد
أثناء تحميل النموذج ثلاثي الأبعاد إلى github ، رأيت ما يتكون منه ملف stl ، وقررت كتابة الرمز لإنشاء نموذج ثلاثي الأبعاد للطوبوغرافيا السفلية من قائمة المسافات التي تم التقاطها به بواسطة جهاز تحديد مدى الموجات فوق الصوتية (لم يتم تثبيته بعد).
مثال tetrahedron.stl في النصsolid
facet normal 0 0 0
outer loop
vertex 0 0 0
vertex 2 0 0
vertex 1 1 2
endloop
endfacet
facet normal 0 0 0
outer loop
vertex 2 0 0
vertex 1 2 0
vertex 1 1 2
endloop
endfacet
facet normal 0 0 0
outer loop
vertex 0 0 0
vertex 1 2 0
vertex 1 1 2
endloop
endfacet
facet normal 0 0 0
outer loop
vertex 0 0 0
vertex 1 2 0
vertex 2 0 0
endloop
endfacet
endsolid
التالي صور مثيرة للاهتمام وليست غاية




الملخص
هذا هو كل ما أردت أن أقوله ، فكرتي الرئيسية التي لم أفهمها هي إنشاء جهاز يسمح بتلقي المعلومات من تحت الماء على مسافة كبيرة من الكمبيوتر المحمول للتحكم. وداعا حتى المقالة القادمة.