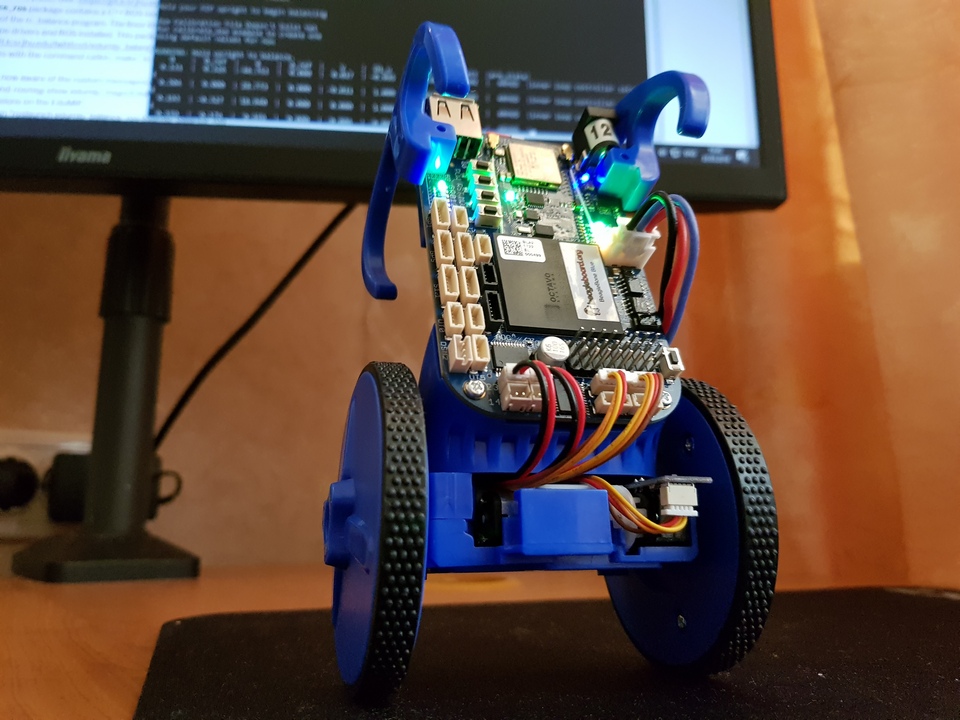
يمكن للروبوت الحفاظ على التوازن على عجلتين ، والقيادة بسرعة كبيرة. على متن لينكس كامل ، هناك وأي فأي. يمكنك البرمجة من خلال واجهة الويب. هناك تعليمات ومصادر لتشغيل ROS عليه. بشكل عام ، الكثير من الفرص للإبداع.
لطالما أردت اللعب بروبوت مع جيروسكوب ومقياس تسارع وبوصلة ونعم لتعلم ROS. لم أكن أرغب في لحام أي شيء كما كان من قبل. لذا فإن BeagleBone لديها جهاز كمبيوتر مدفوع واحد مع بطاقة توسعة مدمجة لروبوتات BeagleBone Blue ، والتي تحتوي على أجهزة الاستشعار وسائقي المحركات اللازمة. بعد مرور بعض الوقت ، تم الانتهاء من مجموعة أدوات تجميع الروبوت EduMip في الولايات له ، وكتبوا تعليمات لإطلاق ROS عليها مع المصادر. بشكل عام ، اشتعلت فيها النيران.
ما هو مدرج في المجموعة:
- قاعدة العجلات مع المحركات / التروس / العجلات / التشفير / الأسلاك
- 2 خلية 1400 مللي أمبير LiPo
- شاحن 12 فولت
- البيجل الأزرق العظام
تم إنشاء EduMIP في مختبر الروبوتات UC SAN DIEGO المنسق RABOTICS LAB. تستخدم في الدورات عبر الإنترنت والجامعات ودوائر الروبوتات.
EduMIP عبارة عن منصة تعليمية:
- النمذجة الديناميكية والتحكم في التغذية المرتدة للأنظمة غير المستقرة.
- تخطيط حركة الروبوت وتجنب الاصطدام.
- التحكم بمحرك التيار المستمر من خلال الجسور H والتشفير.
- تقييم التوجيه عبر IMU و Barometer.
- الاتصال عبر WiFi (802.11 b / g / n) و Bluetooth (4.1 / BLE).
- شحن وموازنة وحماية ومراقبة بطارية LiPo 2 الخلوية (المضمنة).
- برمجة C موجهة إلى الأحداث في دبيان لينكس.
EduMIP متوافق مع Python و ROS و MATLAB و Simulink و LabVIEW.
تم تطوير هيكل EduMip بالتعاون مع WowWee.
EduMIP من السهل توسيعه مع الطباعة ثلاثية الأبعاد ، وهناك مكتبة واسعة من البرامج لملايين أجهزة الاستشعار القياسية وأجهزة الاتصال عبر: USB و I2C و SPI و CAN و UART (GPS و DSM2) و PWM (servos و ESCs) و GPIO و ADC.
على الرغم من كل ذلك ، كان عليّ شراء حديد لحام آخر لحام الأسلاك للمحركات ، من أجل هذا المال يمكننا لحامه على الفور. بقية المجموعة ذات جودة عالية ومعبأة بشكل جيد.
جمعت في مساء واحد. المحركات والعجلات في رأيي اسفنجي. أنا سعيد لأنه لم يكن من الضروري عمليا لحام جميع الإلكترونيات على لوحة واحدة. يتم شحن البطارية من خلال اللوحة ، من النص يمكنك رؤية جهد البطارية.
ميزة إضافية بلا شك بالنسبة لي هي أن BedgleBone لديه شبكة wifi مدمجة ولينكس كامل. يتوفر Cloud9 IDE على الفور ويمكنك برمجة الروبوت عبر الهواء بلغة بايثون ولغات برمجة أخرى. تحتوي اللوحة على 4 جيجابايت من الذاكرة المدمجة التي تمت كتابة لينكس ديبيان عليها بالفعل ، لذا يمكنك البدء والبرمجة بدون محرك أقراص محمول. فقط لـ ROS ، تحتاج إلى كتابة الصورة على بطاقة ذاكرة.
في الجزء التالي سأقوم بتحليل كيفية برمجته ، بينما أنا عالق في كيفية تثبيت مكتبات إضافية من هذا الروبوت في دبيان.