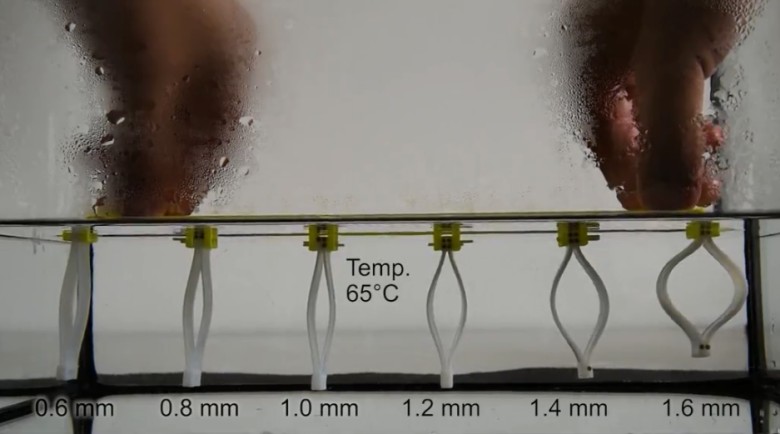
 يعتمد تفاعل شرائط البوليمر المرنة مع التغيرات في درجات الحرارة على سمكها. تظهر هنا شرائط من 0.6 مم إلى 1.6 مم عند وضعها في الماء عند 65 درجة مئوية. تختلف سرعة الاستقامة من 7 إلى 37 ثانية ، مما يسمح لك ببرمجة إجراءات الروبوت بتسلسل معين
يعتمد تفاعل شرائط البوليمر المرنة مع التغيرات في درجات الحرارة على سمكها. تظهر هنا شرائط من 0.6 مم إلى 1.6 مم عند وضعها في الماء عند 65 درجة مئوية. تختلف سرعة الاستقامة من 7 إلى 37 ثانية ، مما يسمح لك ببرمجة إجراءات الروبوت بتسلسل معينقام المهندسون في معهد كاليفورنيا للتكنولوجيا وزملاؤه من المدرسة التقنية العليا السويسرية في زيورخ
بإنشاء روبوتات يمكنها التحرك بشكل مستقل دون استخدام أي محركات أو أجهزة أو مصدر طاقة. يبدو وكأنه آلة الحركة الدائمة؟ ليس بالفعل. والحقيقة هي أن كل زوج من المجاديف أو "العضلات" قادر على حركة
واحدة فقط من المجاديف بعد إنزال الروبوت في الماء. لكن الشيء البارز هو أن العضلات والمجاديف يمكن أن تكون كما تشاء - ويمكن أن تعمل على فترات مختلفة من الوقت الواحد تلو الآخر. وبالتالي ، يمكنك
برمجة مسار الروبوت مسبقًا ، وكذلك تنفيذ إجراءات مختلفة - على سبيل المثال ، إلقاء شحنة متبوعة بمناورة تهرب. تم تمويل البحث من قبل مكتب أبحاث الجيش.
على الرغم من البساطة الواضحة ، فهذه هي الأجهزة الأولى من نوعها التي تستخدم تشوه المواد في الإجراءات المبرمجة في درجة الحرارة في الماء. يظهر مبدأ العملية في
أشرطة الفيديو التوضيحية .
قائمة عروض الفيديو
- ضربة واحدة . تقابل المسافة المقطوعة من ضربة واحدة تقريبًا 1.15 من طول الروبوت.
- يعتمد تفاعل "العضلات" مع تغير درجة الحرارة على سمك أشرطة البوليمر المرن. يُظهر الفيديو خطوطًا بسماكة 0.6 مم إلى 1.6 مم عند وضعها في الماء عند 65 درجة مئوية. تتراوح سرعة الاستقامة من 7 إلى 37 ثانية.
- حركة روبوت التجديف مع زوجين من المجاديف . يتم تنظيم تسلسل السكتات الدماغية من خلال سمك العضلات في الزوجين الأول والثاني من المجاديف. المسافة المقطوعة من السكتة الدماغية المزدوجة تقارب 1.9 مرة طول الروبوت.
- حركة مع دوران اليسار . يقوم الزوج الأول من المجاذيف بتحريك الروبوت إلى الأمام بحوالي 0.5 من جسمه ، ويدور المجذاف من المرحلة الثانية الجسم بنحو 21.45 درجة.
- حركة بدورتين . بعد السكتة الدماغية الأولى ، يتحول الروبوت حوالي 21.64 درجة إلى اليسار ، وبعد السكتة الدماغية الثانية ، يتحول حوالي 21.45 درجة إلى اليمين.
- العضلات مصنوعة من مادة أخرى تتوسع عند درجة حرارة مختلفة من 40 درجة مئوية. يُظهر الفيديو أن المادة السابقة لا تستجيب لدرجة الحرارة هذه. وبالتالي ، يمكن للعلماء برمجة الروبوت للحركات المختلفة اعتمادًا على درجة الحرارة المحيطة.
- مثال على خوارزمية معقدة . يسبح الروبوت المسافة المحددة ، ويسقط الحمل ، ثم يطفو بعيدًا في الاتجاه المعاكس. يتم توفير الشرط الأول بواسطة شرائط بوليمر أرق يتم إطلاقها في وقت سابق. يتم تأمين الحمل بشرائط سميكة تتفاعل لاحقًا وتحرر الحمل بعد أن أبحر الروبوت المسافة المبرمجة.
- توضح الآلية الداخلية للمحرك كيف تضغط العضلات وتنقل الآلية المضطربة من حالة توازن إلى أخرى.
وفقًا للمطورين ، فإن هذه الدراسة بطريقة ما "تمسح الحدود بين المواد والروبوتات" ، حيث تعمل المادة نفسها كآلة في الجهاز: "توضح الأمثلة لدينا أنه يمكننا استخدام مواد منظمة مشوهة استجابة للإشارات البيئية ، من أجل
تقول كيارا دارايو ، أستاذ الهندسة الميكانيكية والفيزياء التطبيقية في معهد كاليفورنيا للعلوم والتكنولوجيا والهندسة والعلوم التطبيقية ، أحد مؤلفي مقال علمي ،
إن التحكم والتحكم في الروبوتات.
يتم تشغيل الروبوت بواسطة شرائط من البوليمر المرن ، والذي يتقلص عند البرد ويمتد عند تسخينه. يتم وضع البوليمر من أجل تنشيط مفتاح ثنائي الثبات في جسم الروبوت ، والذي يتم إرفاقه بدوره بعنصر متحرك ، على سبيل المثال ، إلى مجداف للشوط إلى الأمام.
استندت الدراسة إلى
عمل علمي سابق على سلاسل العناصر القابلة
للثني لنقل الإشارات وتصميم البوابات المنطقية لآلة قابلة للبرمجة.
بالإضافة إلى درجة الحرارة ، يمكن برمجة الروبوت لأداء الإجراءات اعتمادًا على الظروف الأخرى - على سبيل المثال ، للاستجابة للتغيرات في حموضة الوسط.
تم
نشر المقالة العلمية في 15 مايو 2018 في مجلة
Proceedings of the National Academy of Science of the United States of America (doi: 10.1073 / pnas.1800386115،
pdf ).