أولاً ، كتبت مقدمة طويلة من أين أتت هذه المهمة ، ثم بدت مملة بالنسبة لي وحذفتها.
لذا ، المهمة: إنشاء طائرة بدون طيار مستقلة لرصد حالة خطوط الكهرباء (خطوط الكهرباء).
منذ:
- هذا مشروع هواية ويمكنني ارتكاب خطأ كبير في حساباتي
- تشكل الأجسام الطائرة خطراً على الكائنات الحية وممتلكاتها ،
ثم يجب أن تؤخذ هذه المقالة فقط آفاق موسعة ، وليس دليلاً للعمل.
قائمة عيوب الكشف عن خطوط الكهرباء.
متطلبات الطائرات بدون طيار
- الإقلاع والهبوط الرأسي (بدون المقاليع والمظلات) ، أي المروحية
- قادرة على الإقلاع ، والتحليق في نقاط معينة ، والعودة والهبوط تلقائيًا
- يمكنك تعديل مهمة طيران ، وإعطاء قيادة للإقلاع والهبوط من أي مكان في العالم
- بث القياس عن بعد والفيديو في الوقت الحقيقي عبر الإنترنت
- تحميل الصور ومقاطع الفيديو من الكاميرا المدمجة إلى الخادم أثناء الرحلة أو بعدها
- قم بشحن البطارية أو استبدالها ميكانيكيًا دون تدخل بشري.
وكذلك متطلبين متضاربين:
- إلكترونيات موثوقة (إذا سقطت في مكان ما ، اعتبرها مفقودة)
- التكلفة المنخفضة نسبيًا للتجربة (إذا سقطت في مكان ما ، اعتبرها ضائعة)
درجة الاستقلالية ، من الناحية المثالية ، رائعة: تطير الطائرة بدون طيار على طول المسار المخطط مسبقًا ، وتحمل صورة إلى الخادم ، ويحدد البرنامج على الخادم العيوب في الصورة ويشكل طلبًا إلى فريق الإصلاح مع إحداثيات مواقع العمل. لا يجب أن تتطلب الطائرة بدون طيار انتباه شخص قبل نهاية عمر العمل لأي جزء ، على سبيل المثال ، بطارية أو محامل.
من الواضح أن هذه المهمة ليست لمدة عام واحد ، لكنني سأبدأ ، وربما سيستلمها أحدهم ويستمر.
على سبيل المثال ، الإصدارات الصناعية النهائية من المجمعات المستقلة:
واحد ،
اثنان ،
ثلاثة ،
أربعة ،
خمسة ،
ستة ،
سبعة ،
ثمانية ،
تسعة ،
عشرة ،
أحد عشر ،
اثنا عشر ،
ثلاثة عشر ،
أربعة عشر . لقد كتبت طلبات للجميع كمشتري محتمل لمعرفة الأسعار. منهم جاهزون للبيع: 2 ؛ جاهزة للبيع في روسيا: 0.
اختيار جهاز التحكم في الطيران
نظرًا لأنني أحتاج إلى بث الفيديو والقياس عن بعد عبر الإنترنت ، يتبادر إلى ذهني فورًا أن أضع كمبيوترًا صغيرًا مزودًا بمودم 4G وكاميرا على الطائرة بدون طيار وإنشاء بث عبر الويب من هذه المجموعة. تم العثور على هذه الحلول:
واحد ،
اثنان ،
ثلاثة . هذه هي لوحات مفردة عادية مع مودم USB خارجي وكاميرا. للتشفير وبث الفيديو ،
يتم استخدام
gstreamer . لكن هذه الأشياء نفسها لا تعرف كيفية التحكم في الطائرة بدون طيار ، يجب استخدامها جنبًا إلى جنب مع وحدة التحكم في الطيران.
مراقب الطيران هو دماغ الطائرة بدون طيار. يراقب حالة أجهزة استشعار الموضع (الجيروسكوب ، مقياس التسارع ، البوصلة) ، إحداثيات GPS ، موضع المقابض على لوحة التحكم ، وبناءً على هذه البيانات ، يتحكم في المحركات للتعليق عند نقطة واحدة أو الطيران إلى مكان ما. يجب أن يكون جهاز التحكم في الطيران متصلاً بطريقة أو بأخرى بالكمبيوتر الموجود على متن الطائرة بحيث يمكنك تحميل مهمة الرحلة أو الإشارة إلى نقطة عشوائية إلى أين تطير ومتى يتم تشغيل الكاميرا.
للبيع يمكنك العثور على العديد من وحدات التحكم المختلفة التي تختلف كثيرا عن بعضها البعض في السعر والوظائف. يعمل بعضهم على برمجياتهم الخاصة ، والبعض الآخر يستخدم برمجيات مفتوحة المصدر ، مثل
Ardupilot وشوكة
PX4 الخاصة به .
مع Ardupilot ، لعبت على أجهزة
ATMEG 8 بت التي لم يكن بها محمل إقلاع USB ، ولكن تم تركيبها على المبرمج. منذ ذلك الحين لم أواجهه وفوجئت بسرور عندما اكتشفت أنه الآن يمكنه العمل على أجهزة كمبيوتر Linux 64 بت ، ولديه مجتمع ضخم من المستخدمين ، سواء الهوايات أو المحترفين ، قائمة طويلة من أجهزة الاستشعار المدعومة من خارج الصندوق ورسمت
خطط 2018-2019 . خلال هذا الوقت ، تمكن من النمو إلى مشروع
DroneCode ، ثم
قطع الاتصال به.
للوهلة الأولى ، نفذت للتو جميع الوظائف الضرورية: الإقلاع والهبوط التلقائي ، وتحميل مهام الرحلة ، وهناك تطبيقات سطح المكتب والهواتف المحمولة لجميع عائلات نظام التشغيل الرئيسية. تتواصل برامج التحكم (GCS - محطة التحكم الأرضية) مع وحدة التحكم الموجودة على اللوحة عبر رسائل قصيرة عبر
بروتوكول MAVLink المفتوح من خلال مجموعة من أجهزة المودم الراديوي (ترسل الطائرة بدون طيار القياس عن بعد ، يرسل GCS أوامر التحكم). أعتقد أن هذه الرسائل يمكن إطلاقها عبر الإنترنت.
ألق نظرة على
قائمة وحدات التحكم المدعومة واختر شيئًا. هناك عشرات الخيارات هناك ، من صغيرة إلى كبيرة وذات خصائص مختلفة.
من بين جميع وحدات التحكم المتنوعة ، أحببت العديد من الخيارات:
| مراقب طيران | Erle PXFMini | حافة امليد | نافيو 2 | إرل الدماغ 3 | بيكس هوك 2 مكعب |
| كمبيوتر إضافي | راسبيري باي زيرو دبليو | لا | التوت بي 3 | لا | التوت بي 3 |
| | | | | |
| تعيين الوزن ، ز | 84 | 97 | 98 | 145 | 150 |
| إجمالي وحدات المعالجة المركزية | 1 | 2 | 2 | 1 | 3 |
| نظام التشغيل يعمل في وقت واحد | 1 | 1 | 1 | 1 | 2 |
| أجهزة استشعار IMU ، ومجموعات | 1 | 2 | 2 | 1 | 3 |
| جهاز استشعار ضغط الهواء | 1 | 2 | 1 | 1 | 1 |
| فائض الطاقة | لا | 2x | 3x | لا | 2x |
| نظام تحديد المواقع العالمي ، جلوناس | الوحدة الخارجية
مع مقياس مغناطيسي إضافي | الوحدة الخارجية
مع مقياس مغناطيسي إضافي | استقبال مدمج ، هوائي خارجي | الوحدة الخارجية
مع مقياس مغناطيسي إضافي | الوحدة الخارجية |
| إدخال الفيديو | CSI على التوت | HDMI | CSI على التوت | CSI | CSI على التوت |
| واي فاي | هل هناك | هل هناك
مسافة طويلة 2 كم
+52 جرام | هل هناك | هل هناك | هل هناك |
| | | | | |
| تكلفة العدة بالدولار | 212 | 700 | 215 | 341 | 331 |
يتم الحصول على المجموعة الأخف وزنًا (84 جم) من الكمبيوتر الصغير
Raspberry Pi Zero W (9 جم) ،
ووحدة تحكم
Erle PXFMini (15 جم) ، ووحدة GNSS الخارجية الأصلية (46 جم)
ومحور USB إضافي (14 جم).

يوجد معالج واحد فقط في هذه المجموعة - على Raspberry Pi. يعلق عليه تحكم PWM لمنظم المحرك ، وقراءات مستشعر القراءة ، ونظام التشغيل Linux مع جميع الشجاعة وفك تشفير الفيديو من الكاميرا. نظرًا لأن Pi Zero لا يحتوي على منافذ USB ، في هذا الخيار يجب عليك استخدام لوحة وصل خارجية. مستشعرات IMU ومدخلات الطاقة دون تكرار.
المجموعة التالية (97 جم) من شركة هونج كونج بأسماء روسية في فريق التطوير هي وحدة تحكم
Emlid Edge (59 جم) مع وحدة GNSS (38 جم). تعمل وحدة GNSS وفقًا لبروتوكول
UAVCAN وهي مجهزة أيضًا
بمقياس مغناطيسي ومستشعر ضغط الهواء. هنا ، معالج ARM Cortex-M3 منفصل مسؤول عن PWM ، نظام التشغيل Linux يعمل على ARM Cortex-A53 رباعي النواة الرئيسي.

تحتوي وحدة التحكم على إدخال فيديو HDMI ، والذي يسمح لك بالاتصال المباشر بها بأي كاميرا بمثل هذا الإخراج ، على سبيل المثال GoPro 4 أو 5. يتم تفسير التكلفة العالية نسبيًا بواسطة أجهزة إرسال واستقبال wifi طويلة المدى في المجموعة (حتى 2 كم مع بث فيديو عالي الدقة). لا يتم تضمين وزن الوحدة النمطية على متن الطائرة (52 جم) في الجدول العام ، نظرًا لأنني أحتاج إلى اتصال 4G ، ومع ذلك ، يمكنك وضع هذا الخيار في الاعتبار: من شبكة wifi بعيدة المدى ، يمكنك إنشاء قناة اتصال احتياطية من خلال جهاز توجيه ثابت مع إنترنت سلكي.
يتكون الخيار التالي (98 جم) من الكمبيوتر الصغير
Raspberry Pi 3 الشهير (45 جم) مع وحدة تحكم
Navio 2 (23 جم) من نفس Emlid وهوائي GNSS خارجي (30 جم). تحتوي وحدة التحكم على معالج Cortex-M3 منفصل للتحكم في PWM على 14 قناة وفك تشفير إشارات SBUS و PPM الواردة من جهاز الاستقبال. يتم التحكم فيه ، بدوره ، من خلال برنامج التشغيل في نواة لينكس ، التي تعمل على التوت.

تم تجهيز وحدة التحكم مع زوج من مستشعرات IMU المنفصلة (مقياس التسارع ، الجيروسكوب ، مقياس المغناطيسية) MPU9250 و LSM9DS1 ، مستشعر ضغط هواء واحد ووحدة
U-blox NEO-M8N GNSS ، والتي ترى GPS و Glonass و BeiDou مع هوائي خارجي عبر موصل MCX.
يمكنك تشغيل هذه "الفطيرة" من 5 فولت في نفس الوقت من ثلاثة جوانب ، والتي تعمل كمصادر مستقلة تتكرر مع بعضها البعض: موصل الطاقة الرئيسي على الدرع ، مخرجات أجهزة PWM ، micro-USB على Raspberry.
وحدة تحكم
Erle Brain 3 (100 جم) مع وحدة GPS خارجية (45 جم) من حيث الوزن والسعر ومجموعة من أجهزة الاستشعار تبدو في الجدول حتى لا أدرج صورة هنا.
بعد ذلك ، لدينا المجموعة الأكثر موثوقية وأثقل
وزنًا (150 جم) ، والتي تتكون من جهاز تحكم الطيران
PixHawk 2 Cube الشهير (80 جم) بهندسة مفتوحة وجهاز كمبيوتر Raspberry Pi 3. وبدلاً من Raspberry في هذه الحالة ، يمكنك استخدام أي لوح فردي خفيف الوزن ، على سبيل المثال ،
Odroid XU4 أو
NVIDIA Jetson أو أي واجهة أخرى ذات واجهات مناسبة ووزن مناسب.

يحتوي PixHawk نفسه على معالجين مثبتين: الأول 32 بت STM32F427 Cortex M4 - وهو المعالج الرئيسي الذي يعمل
بنظام التشغيل
NuttX في الوقت الفعلي (RTOS) والثاني 32M STM32F103 المفلطح. وحدة التحكم مصنوعة على شكل وحدات: يتم تثبيت معالجات ومستشعرات IMU في المكعب (على حامل مضاد للاهتزاز ، وحتى مع التدفئة) ، ويتم توصيل الطاقة والموصلات إلى المحيط بأكمله إلى القاعدة. من المفترض أن الأساسيات يمكن أن تكون مختلفة ويمكن لكل شخص تطوير نفسه لتلبية متطلبات محددة ، والتي يمكنك عندها وضع المكعب النهائي. بالمناسبة ، هناك نسخة جاهزة مع موصل لتثبيت
الكمبيوتر المصغر Intel Edison . ولكن بما أن إنتل لم تعد تطلق أجهزة الكمبيوتر هذه بعد الآن ، فإن Raspberry ستكون أيضًا في هذه المجموعة ككمبيوتر مدمج.
يتم استخدام Raspberry كجهاز كمبيوتر إضافي للاتصال بالإنترنت ويمكنك تشغيل أي مهام كثيفة الموارد عليه (على سبيل المثال ، التعرف على الأنماط في OpenCV) ، دون خوف من أن تؤدي الفشل في هذه العملية إلى "وزن" الوظائف الهامة ، مثل التحكم في المحركات.
لذا ، بالنظر إلى الوزن والمواصفات والسعر ، فإن المكان الأول بالنسبة لي هو مجموعة Navio 2 + Raspberry ، والثانية Pixhawk 2 Cube + Raspberry (+52 g). الآن ، إذا كان تحت Pixhawk أساس في موصل Raspberry Zero الصغير ، وحتى مخرج USB ، فسيكون الأمر أكثر إثارة للاهتمام. ولكن لا يزال يتعذر عليك شراء واحدة ، ولكن ليس من المثير للاهتمام جعلها حتى الآن.
سأكتب في الملاحظات أن الموثوقية المتزايدة تكلف 52 جرامًا إضافيًا و 110 دولارات. وفقًا للنتيجة الإجمالية للحسابات ، قد يتبين أن هذه الأرقام غير مهمة.
شحن مستقل
كما ترى في الإصدارات النهائية أعلاه ، هناك العديد من الطرق لإعداد طائرة بدون طيار مستقلة للرحلة التالية: شحن البطارية من خلال لوحات الاتصال ، والشحن التعريفي بدون اتصال واستبدال البطارية الميكانيكي مع الشحن اللاحق في المحطة.
كل طريقة لها إيجابياتها وسلبياتها ، سأكتب عنها بشكل منفصل ، ولكن على أي حال ، من أجل عملها ، يجب أن تكون الطائرة بدون طيار قادرة على الهبوط في النقطة المطلوبة بدقة سنتيمتر تقريبًا.
الهبوط "إلى النقطة"
من أجل الهبوط الدقيق ، يمكنك استخدام كاميرا الكمبيوتر القياسية على متن الطائرة ، وعلامات بصرية و OpenCV للتعرف عليها. إليك حل
واحد يمكنك البحث عنه في google. ظهرت
واحدة جديدة عندما كتبت هذا المقال. لكن التعرف على الأنماط هو عملية تستغرق وقتًا طويلاً لـ Raspberry ، ولا تريد تنزيلها دون الحاجة الخاصة. أيضا ، ستعتمد جودة التعرف بشكل كبير على المواد التي صنعت منها العلامة وظروف الإضاءة. من المستحسن أن يكون هذا مستشعرًا منفصلاً وأن يوفر إحداثيات جاهزة للنقطة المرئية المرغوبة ، بغض النظر عن وجود وزاوية حدوث الضوء. وهذا موجود في قائمة معدات Ardupilot المدعومة ، والتي تسمى
IR-Lock .
 تستخدم Airobotics
تستخدم Airobotics من القائمة أعلاه أيضًا هذا الحل. وهو يعتمد على
وحدة الكاميرا مفتوحة المصدر
Pixy CMUcam5 . هذه الوحدة مجهزة بكاميرا ومعالج ، ويمكن "تعليمها" للتعرف على صور معينة للكائنات ، ثم عند الإخراج ، احصل على إحداثيات جاهزة لهذه الكائنات في الصورة.
من خلال معرفة إحداثيات الصورة التي تم التعرف عليها على الصورة والمسافة إليها ، يقوم جهاز التحكم في الطيران بحساب المسافة وأي اتجاه يحتاج إلى تحريك الطائرة بدون طيار.
يتكون تعديل IR-Lock في حقيقة أن
مصباح يدوي IR من مصابيح LED يستخدم كعلامة يمكن التعرف عليها ، ويتم استبدال العدسات التقليدية على الكاميرا بالعدسات التي تنقل ضوء الأشعة تحت الحمراء فقط. ونتيجة لذلك ، في أي ضوء ، ترى الكاميرا تألق المصباح باللون الأبيض على خلفية سوداء (وليس أكثر) ، مما يزيد بشكل كبير من دقة التعرف.
للتشغيل العادي لهذا المستشعر ، هناك حاجة أيضًا إلى محدد مدى ، والذي سيقيس الارتفاع فوق سطح الأرض. يوصي المطورون باستخدام
محدد المدى بالليزر ، على سبيل المثال
LightWare LW20 (20 جرامًا و 299 دولارًا ، يقيس ما يصل إلى 100 متر) ، أو
VL53L0X رخيصة وقصيرة (أقل من 1 جرام و 10 دولارات ،
مقاسات تصل إلى 2 متر) ، والتي أصبحت
مدعومة في أحدث إصدارات Ardupilot. لسبب ما ، لا يستحق مستشعر الموجات فوق الصوتية لأغراض الهبوط ثقة مطوري IR-Lock.
بالمناسبة ، تهبط طائرات بدون طيار DJI تلقائيًا باستخدام الموجات فوق الصوتية وكاميرات ستيريو.
شنق مثل رجل ميت
لكي تتوقف الطائرة بدون طيار في مكان واحد وليس "تسبح" ، فإن GPS وحده لا يكفي. لسوء الحظ ، بسبب الغلاف الجوي ، يمكن أن تطفو الإحداثيات من أجهزة استقبال GPS في غضون عشرات الأمتار ، ويجب استخدام أنظمة تصحيح
GPS RTK لدقة السنتيمتر. يستخدم هذا النظام محطة ثابتة برية كمعيار لتنسيق الانحرافات والاتصال اللاسلكي مع اللوحة لإرسال قيم هذه الانحرافات هناك. مثل هذا الشيء ضروري لتصوير الخطط الفوتوغرافية ، متبوعًا بلصقها في بطاقات كبيرة ، ولغرض تعليقها في مكانها ، سأقتصر على جهاز الاستشعار البصري
PX4Flow في
الوقت الحالي .
يعمل على نفس مبدأ الفأرة الضوئية. على عكس IR-Lock ، فإنه لا يتعرف على صورة معينة وفي Ardupilot يعملون في أوضاع طيران مختلفة. يتم تحليل صورة الكاميرا بمعدل إزاحة 400 مرة في الثانية ، ويمكن قراءة قيم الإزاحة المحسوبة بواسطة وحدة التحكم باستخدام بروتوكول I2C. يزن المستشعر (
الأجهزة المفتوحة ) 15 جرامًا ولديه كل ما تحتاجه على اللوحة: وحدة معالجة مركزية Cortex M4F بسرعة 168 ميجاهرتز (128 + 64 كيلو بايت من ذاكرة الوصول العشوائي) ، ومستشعر بصري 752 × 480 MT9V034 وجيروسكوب ثلاثي المحاور L3GD20. للتشغيل العادي ، يوصى أيضًا باستخدام محدد المدى بالليزر ، بدلاً من الموجات فوق الصوتية. على الرغم من أن الوحدة نفسها توفر موصلًا فقط لمستشعر الموجات فوق الصوتية.
الحد الأدنى من أدوات الإلكترونيات
هنا ما تجمع:
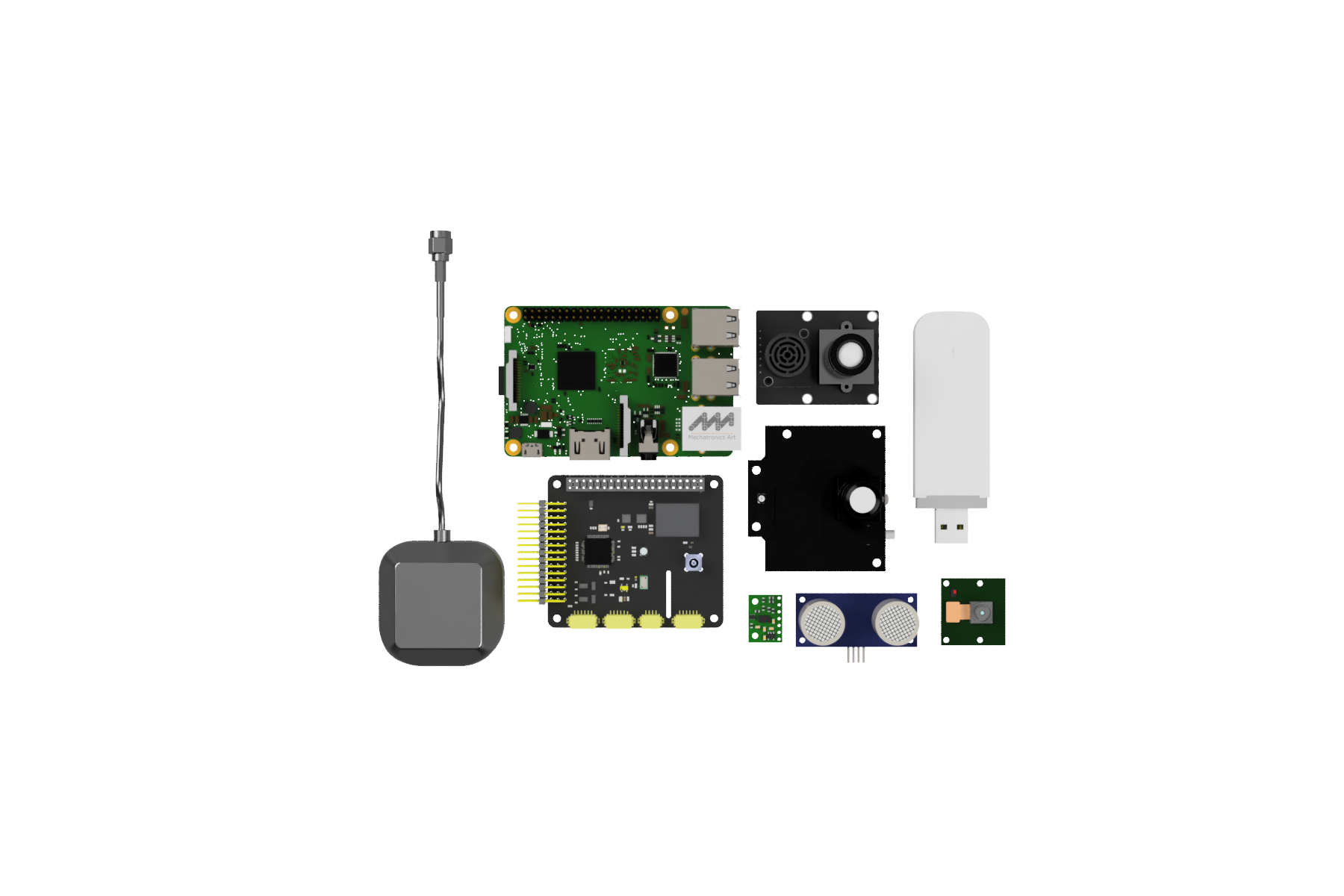
يبلغ الوزن الإجمالي 199 جم ، وتعمل جميع المكونات من 5 فولت وتستهلك حوالي 2 أمبير (10 وات) في وضع بث الفيديو.
تحتوي المجموعة على جهاز استشعار المسافة بالموجات فوق الصوتية الذي سيتطلع إلى موضوع العقبات. تركت الرؤية المجسمة والأغطية الدائرية لوقت لاحق ، إذا ظهرت حاجة حقيقية إليها.
حمولة
نظرًا لأن الكاميرا الأصلية من Raspberry تلتقط صورًا متوسطة الجودة ، ولا تعرف أيضًا كيفية التقاط الصور في نفس وقت الفيديو ، فسيتم استخدامها فقط للبث عبر الإنترنت ، وككاميرا رئيسية تحتاج إلى واحدة مناسبة للكشف عن العيوب على خطوط الكهرباء.
GoPro Hero 5 Session و
Multisectral Parrot Sequoia و dual
Sentera Double 4K و Infrared
VIR Vue Pro مناسبة لمعظم العناصر من قائمة العيوب المكتشفة. كل واحد منهم يزن حوالي 100 غرام.
لتثبيت الكاميرا من أجل تحسين جودة الصور ، سيطير تعليق محوري 2 أو 3 في الحمل معها.

تزن تعليق
بسيط ثلاثي المحاور حوالي 160 جرامًا ويتم تشغيله بواسطة 12 فولت ، ولديه تيار عمل عند هذا الجهد يبلغ حوالي 50 مللي أمبير وأقصى تيار 700 مللي أمبير عند انحشار المحركات.
التغذية
لتزويد جميع الإلكترونيات بالطاقة ، يلزم توفير مصادر بجهد 5 فولت (بحد أدنى 2.2 أمبير) و 12 فولت (بحد أدنى 1 أمبير). بالنظر إلى الطاقة الاحتياطية لوحدة التحكم في الطيران ، فأنت بحاجة إلى مصدرين مستقلين بجهد 5 فولت. يمكنك إنشاء نظام طاقة من وحدات فردية ذات قيمة اسمية مناسبة أو العثور على "3 في 1" جاهز ، على سبيل المثال ،
مثل (24 جم ، أقصى جهد دخل يصل إلى 28 فولت ، مخرجات 3A). سيتم توصيل
مستشعر تيار (22 جم) به بحيث يمكن قياس استهلاك mAh على البطارية.
طقم إلكترونيات + كاميرا + تعليق + نظام طاقة يزن 505 جم.
المحركات والمراوح
في العديد من الطائرات بدون طيار المهنية ، رأيت محركات
T-Motor والمراوح. على ما يبدو ليست عارضة. في وثائق Ardupilot ،
يوصى بها أيضًا كنظام دفع للطائرات بدون طيار المهنية. لذلك ، سنبحث عن المحركات المناسبة لهم.
لكي تطير الطائرة بدون طيار لفترة طويلة ، هناك حاجة إلى محركات ذات كفاءة قصوى. يتم قياس كفاءة حزم المحرك والمروحة من خلال كمية الدفع بالجرام لكل 1 وات من الطاقة المستهلكة.
لمعرفة المحرك الأكثر ملاءمة ، تحتاج إلى معرفة الوزن الإجمالي للطائرة بدون طيار المجمعة بالكامل ، مع مراعاة الإطار والبطارية والمحركات نفسها مع البراغي. البطارية مطلوبة بحيث تستمر لمدة 30 دقيقة. هناك حاجة إلى الإطار بحيث يلائم كل شيء عليه ولا تلمس البراغي أي شيء.
الكثير من المجهول ، لذلك
سأستخدم الآلة الحاسبة عبر الإنترنت
لـ quadcopters E-calc .
بعد أن لعبت في الآلة الحاسبة ، اخترت
محركات Antigravity 4004 KV300 (53 جم) مع مسامير
15x5 (27 جم). في الوضع الأمثل ، بجهد إمداد 24 فولت ، تسحب هذه المجموعة 474 جرامًا بتيار 1.4 أمبير.الكفاءة 14.11 جم / واط ، نسبة الجر إلى الوزن الميت = 5.9: 1. بأقصى سرعة ، يكون الدفع 1311 جرامًا بتيار 7.5 أ. سيكون المروحية بأربعة محركات ، أي رباعية. الوزن المثالي للإقلاع = (474 جم * 4 محركات) = 1896 جم ، كحد أقصى (مع مراعاة نسبة الوزن إلى الدفع 2: 1) = (1311 جم * 4 محركات) / 2 = 2622 جم.
يتم التحكم في المحركات بواسطة وحدات التحكم في السرعة. جهد تزويد الطاقة للمحركات = 24 فولت ، الحد الأقصى لتيار التشغيل = 7.5 أمبير ، لذلك تحتاج إلى منظم لهذا الجهد ومع تيار عمل ، مع مراعاة الهامش ، على الأقل 10 أمبير. يحتوي T-Motor على أخف منظم (7 جم بدون أسلاك) لهذا الجهد - إنه
FPV 35A-32bit 3-6S . وهي مصنوعة على أساس البرامج الثابتة الشهيرة
BLHeli-32 ، مع رمز مغلق ، ولكن مع إعدادات
واسعة وعدد كبير من نظائرها .
المجموع الفرعي:VMG (مجموعة محرك المروحة) ، تتكون من المحركات والمراوح والمنظمين (4 قطع لكل منها) تزن 346 جم.
جنبا إلى جنب مع الإلكترونيات وحمولة (346 + 505) ، يتم الحصول على 851 جم ، مع مراعاة السحابات والأسلاك والموصلات (دعنا نقدر +100 جم) = 951 جم.
مع الوزن الأمثل ، يبقى الإطار والبطارية (1896 - 951) = 945 جم ، وبحد أقصى (2622 - 951) = 1671 جم.
الإطار
نحن نحسب الحد الأدنى لحجم الإطار بحيث لا تتداخل مراوح 15 بوصة المحددة مع بعضها البعض لإنشاء جر. تشير أبعاد مصنعي الإطارات في المسافة بين محاور المحركات الموجودة قطريًا عن بعضها البعض.
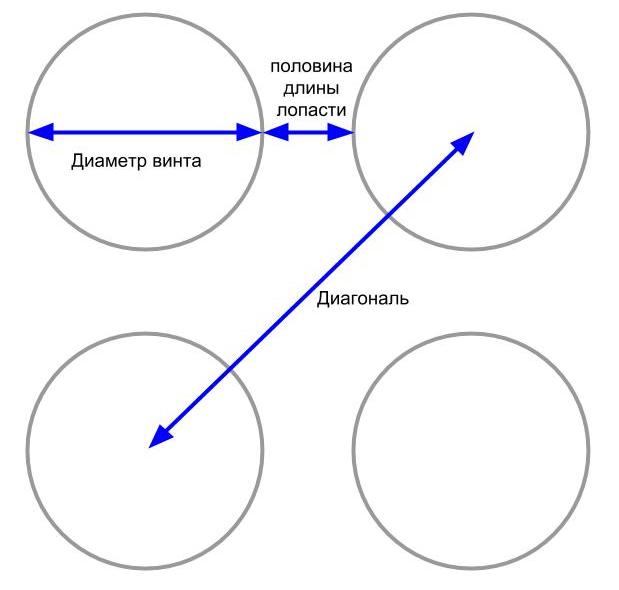
من الصورة ، يمكنك العثور على الوتر ، الذي يتم حسابه من الساق ، يساوي مجموع قطر المسمار والمسافة بين المراوح. ستدور شفرات المروحة المتجاورة مقاس 15 بوصة بمقدار 1 ملليمتر عن بعضها البعض عند قطر إطار يبلغ 540 مم. أضف مساحة صغيرة وسيكون حجم الإطار المناسب حوالي 600-700 مم.
يمكنك العثور على الكثير للبيع ، على سبيل المثال ، مرة واحدة : 600 مم و 750 جم ، واثنين : 650 مم و 450 جم ، وثلاثة : 690 و 675 جم ، وأربعة : 650 مم و 750 جم . تتميز جميعها بأداء ووجود عناصر قابلة للطي (الشاسيه ، العوارض) لسهولة النقل.سأقوم بتأجيل تحديد مثيل معين لاحتياجاتي ، لإجراء مزيد من الحسابات ، سأضع في الاعتبار وزن الإطار الذي يبلغ 450 جرامًا.لا تزال هناك بطارية تزن 495 جرامًا للوزن الأمثل و 1221 جرامًا للحد الأقصى.البطارية
لتحديد البطارية ، تحتاج إلى معرفة ما يجب أن تعطيه الحالية.بأقصى سرعة ، ستأكل المحركات 30A (7.5A * 4 محركات) ، والإلكترونيات حوالي 0.45A (10 واط). نظرًا للهامش الصغير ، فإننا نقترب من الحد الأدنى لتيار بطارية التشغيل 35 أمبير. بالنسبة لبطاريات Li-Po ذات إنتاج تيار مرتفع عند 30 درجة مئوية ، ستكون السعة الدنيا 1.2 أمبير (35/30) ، أما بالنسبة للبطارية Li-Po و Li-Ion الأخف وزنا عند 10 درجات مئوية ، فإن الحد الأدنى للسعة هو 3.5 أمبير (35/10) .كخيار ، تجميع 6S2P من Li-Ion Sony VTC6مع BMS ، يزن حوالي 630 جم (بسعة 6 Ah). مع هذه البطارية ، ستزن الطائرة بدون طيار 2031 جرامًا ، وهي 135 جرامًا أكثر من المستوى الأمثل ، ولكن ضمن الحد الأقصى. الآن دعونا نحسب المدة التي يمكن للمروحية فيها التجميد في الظروف المثالية. بوزن إجمالي يبلغ 2031 جرامًا ، يحتوي كل محرك على 508 جرامًا ، فلنلقِ نظرة على خصائص المحرك ونجد الاستهلاك الحالي باستخدام هذا الجر. سيكون يساوي 1.6A تقريبًا. ستعطي 4 محركات وإلكترونيات ما مجموعه 6.85A (1.6 * 4 + 0.45). مع الأخذ بعين الاعتبار تفريغ البطارية حتى 20٪ ، ستظهر (6 Ah * 80٪ / (6.85 A)) = 0.7 ساعة أو 42 دقيقة.التخطيط
 بينما كنت أختار إطارًا مناسبًا وأفكر في كيفية وضع كل هذا عليه وكيفية إصلاحه ، توصلت إلى استنتاج مفاده أنه سيكون من الأسهل رسم بعض التفاصيل وطلب الطباعة ثلاثية الأبعاد من البلاستيك والطحن من الكربون. يمكن طلب زوج من قطع الحديد والأجهزة النهائية على Aliexpress.
بينما كنت أختار إطارًا مناسبًا وأفكر في كيفية وضع كل هذا عليه وكيفية إصلاحه ، توصلت إلى استنتاج مفاده أنه سيكون من الأسهل رسم بعض التفاصيل وطلب الطباعة ثلاثية الأبعاد من البلاستيك والطحن من الكربون. يمكن طلب زوج من قطع الحديد والأجهزة النهائية على Aliexpress.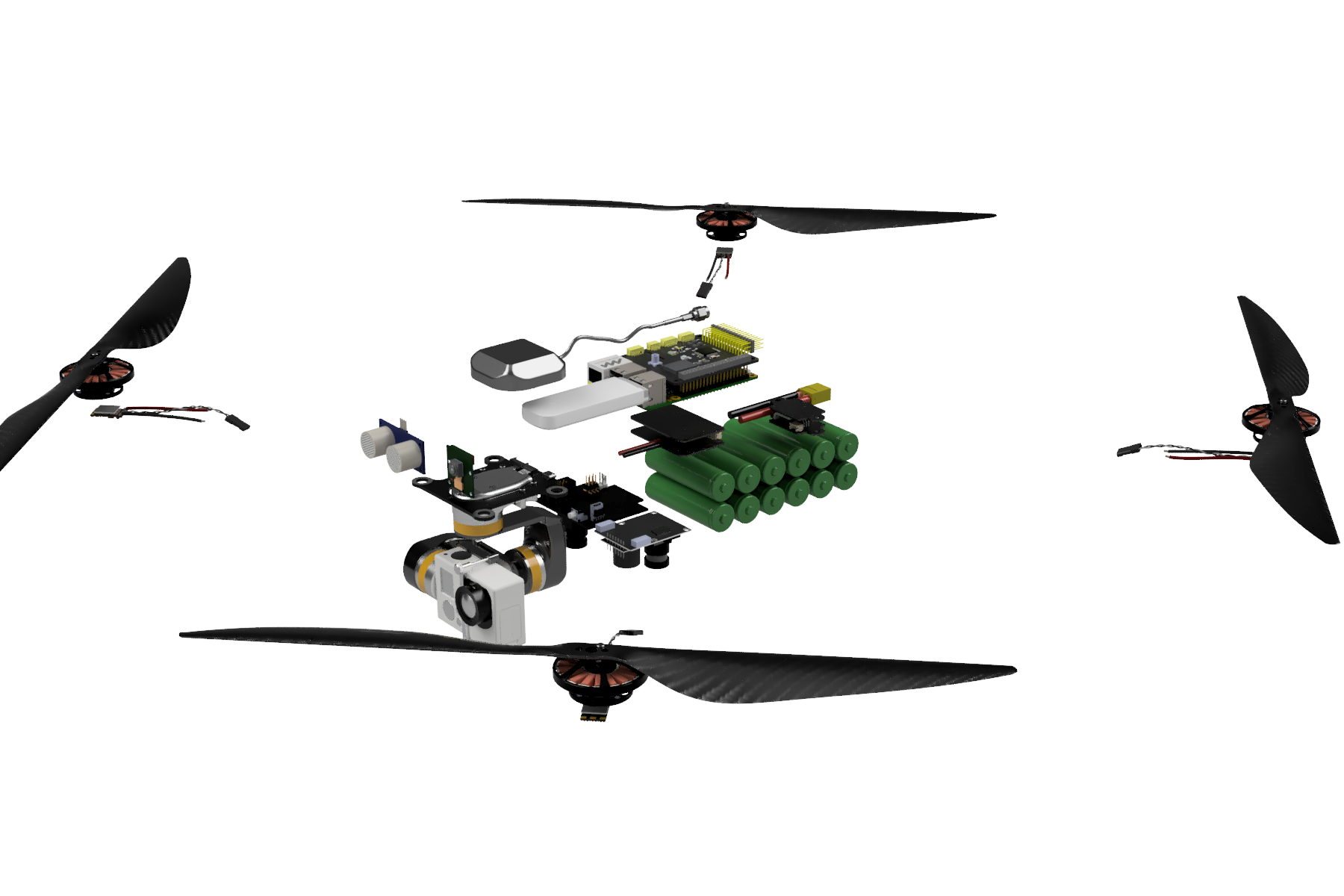 بعد أن جربنا قليلاً التخطيط ومركز الجاذبية ، حصلنا على مثل هذا الإطار:
بعد أن جربنا قليلاً التخطيط ومركز الجاذبية ، حصلنا على مثل هذا الإطار: يتكون من أنابيب وألواح الكربون وأجزاء من الألومنيوم ومثبتات مصنوعة من التيتانيوم. يبلغ وزن الإطار 350 جرام بقطر 700 مم. 3D نموذج الإطار و قائمة أجزاء .نموذج مجمع بالكامل (بدون أسلاك):
يتكون من أنابيب وألواح الكربون وأجزاء من الألومنيوم ومثبتات مصنوعة من التيتانيوم. يبلغ وزن الإطار 350 جرام بقطر 700 مم. 3D نموذج الإطار و قائمة أجزاء .نموذج مجمع بالكامل (بدون أسلاك): يجب أن يكون الوزن الإجمالي للمروحية مع الإلكترونيات وبطارية وأسلاك Li-Ion 6S2P 1931.نعم ، بدا لي أيضًا أن الطائرة بدون طيار تبين أنها عارية جدًا عن إصدار مستقل ، وأن المطر الناعم سوف يبلل الإلكترونيات الموجودة على متن الطائرة بسهولة. لذلك ، أضفت القليل من البلاستيك:
يجب أن يكون الوزن الإجمالي للمروحية مع الإلكترونيات وبطارية وأسلاك Li-Ion 6S2P 1931.نعم ، بدا لي أيضًا أن الطائرة بدون طيار تبين أنها عارية جدًا عن إصدار مستقل ، وأن المطر الناعم سوف يبلل الإلكترونيات الموجودة على متن الطائرة بسهولة. لذلك ، أضفت القليل من البلاستيك: نموذج ثلاثي الأبعاد للإطار . قائمة تفاصيل الإطار .تجميع النماذج ثلاثية الأبعاد . قائمة المكونات .وزن الإطار الفارغ بعلبة 384 جرامًا ، الوزن الإجمالي 2020 جرامًا ، وقت الشنق المقدر بشحنة واحدة (تفريغ البطارية حتى 20٪): 44 دقيقة.
نموذج ثلاثي الأبعاد للإطار . قائمة تفاصيل الإطار .تجميع النماذج ثلاثية الأبعاد . قائمة المكونات .وزن الإطار الفارغ بعلبة 384 جرامًا ، الوزن الإجمالي 2020 جرامًا ، وقت الشنق المقدر بشحنة واحدة (تفريغ البطارية حتى 20٪): 44 دقيقة.صندوق للشحن
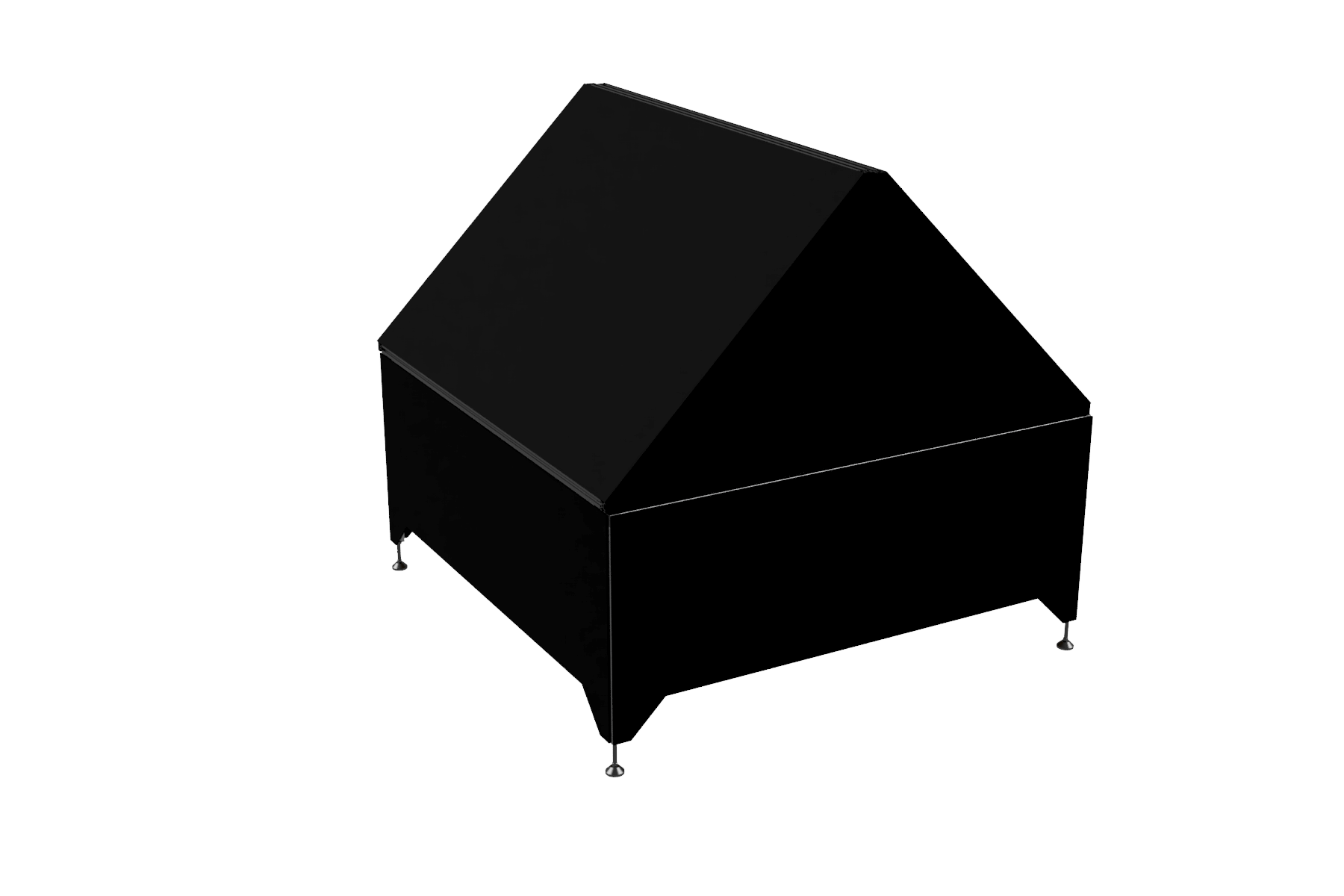
 سيصنع صندوق الشحن من ملف الألمنيوم ، وتركيب الأجهزة وألواح شطيرة الألومنيوم. سيكون لديها جهاز توجيه وجهاز كمبيوتر وأجهزة استشعار الطقس وكاميرا مع إطلالة على منطقة الهبوط. قررت أن أصنع سقفًا مائلاً من جناحين بحيث لا تتراكم الثلوج في الشتاء ولن تتداخل مع الفتح. لم يتم بعد التفكير بشكل كامل في آلية فتح الصمامات ، ولم يتم تحديد نظام الشحن بعد (أحتاج إلى نصائح).
سيصنع صندوق الشحن من ملف الألمنيوم ، وتركيب الأجهزة وألواح شطيرة الألومنيوم. سيكون لديها جهاز توجيه وجهاز كمبيوتر وأجهزة استشعار الطقس وكاميرا مع إطلالة على منطقة الهبوط. قررت أن أصنع سقفًا مائلاً من جناحين بحيث لا تتراكم الثلوج في الشتاء ولن تتداخل مع الفتح. لم يتم بعد التفكير بشكل كامل في آلية فتح الصمامات ، ولم يتم تحديد نظام الشحن بعد (أحتاج إلى نصائح). في المقالة التالية ، سأخبرك بكيفية تهيئة وإطلاق طائرة بدون طيار عبر الإنترنت باستخدام واجهة المستخدم الرسومية أو سطر الأوامر ، حول أنظمة الشحن التي أختارها حاليًا ، برنامج للتحكم في الطائرة وتحليل الصور ، ولماذا لم تستمر رحلتي الأولى عبر الإنترنت لفترة طويلة:
في المقالة التالية ، سأخبرك بكيفية تهيئة وإطلاق طائرة بدون طيار عبر الإنترنت باستخدام واجهة المستخدم الرسومية أو سطر الأوامر ، حول أنظمة الشحن التي أختارها حاليًا ، برنامج للتحكم في الطائرة وتحليل الصور ، ولماذا لم تستمر رحلتي الأولى عبر الإنترنت لفترة طويلة:
يتبع ...الجزء الثاني حول البرامج.