كهربائيًا ، يتكون تصميم المستشعر من الموصلات فقط. ابتدائي.
لا يوجد ربط - من حيث المبدأ - هذان "زران" من الأرض إلى المنفذين 2 و 3 ، أبسط من جهاز استقبال للكشف!

انحراف صغير في التاريخ (بخط مائل) - لقد انخرطت في الأسلحة الهوائية لأكثر من 20 عامًا ، وطوال هذا الوقت استخدمت طريقة البندول الباليستية لقياس سرعة الرصاصة.
ولكن ظهرت البندقية - طاقة ضد عيار 4.5 مم ماغنوم - 100 مرة !!! المزيد - لا تستخدم نفس سجل التعليق!
في ذلك الوقت ، تعرفت بالفعل على استخدام Arduino للأغراض السلمية.
تم تصميم الأساس بواسطة تصميم Mikhail Shevchenko على زوجين من أجهزة الاستشعار البصرية.
قام بعمل خيار مثبت على البرميل ، لكن ارتداد حتى بضغط الهواء الربيعي بعد عدة طلقات دمرت مصابيح LED.
حاولت تجميع وحش إطار عالمي مع العديد من أجهزة الاستشعار البصرية - فشل.
قررت أن تبسط ، جئت إلى البناء الموصوف ، لا يوجد مكان آخر أذهب إليه ؛-)
تم اقتراض مبدأ أجهزة الاستشعار من المبدعين لبرنامج Airspeed (في الأصل من التسعينات).
ما عليك سوى إضافة متحكم (الدقة هي ترتيب حجم أعلى)!
أي أنه عندما يعمل ، يبدو الأمر كذلك!
على عكس بطاقات الصوت ، كان عليّ ألا أعمل بإشارة تناظرية ، ولكن مع الانتقال من منطقي 1 إلى 0.
وقد سبق الحظ العديد من التجارب - خياران للإطار ، و 3 أنواع من "الربط" الكهربائي و 4 مخططات تحرير (برامج).
تبين أن سحب الجهد إلى المسامير الرقمية (PULLUP) هو الحل الأكثر حيوية واستقرارًا!
ونتيجة لذلك ، فإن احتمال ارتكاب خطأ عند تكرار هذا المخطط هزيل!
كل شيء ، ليس هناك وقت لمزيد من التوضيح ، يمكن تجميع أجهزة الاستشعار ببساطة من خلال النظر إلى الصور.
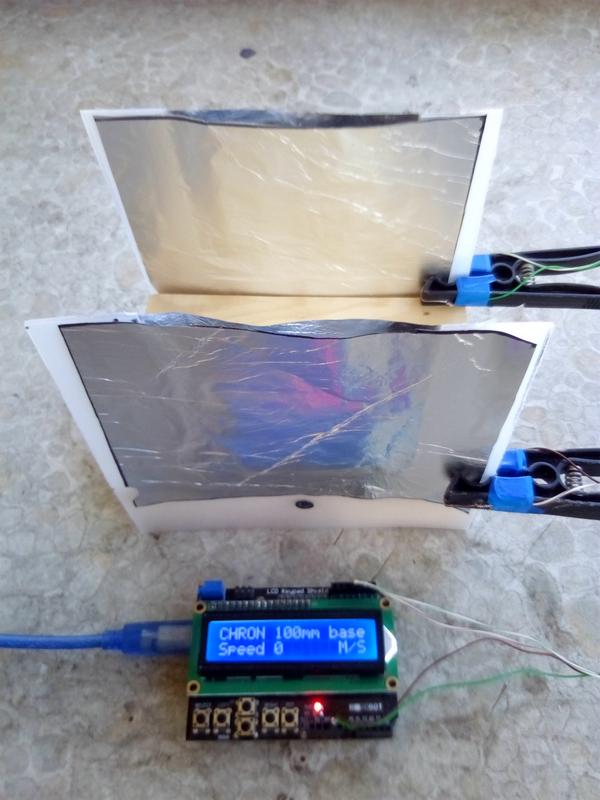
لذا ، نبدأ لعبة FIFA - المواد الأولية هي كتلة خشبية 15x10x5cm ، قطعتان من الورقة البلاستيكية 15x15cm ، 2.5 مم.
عند سمك الإطار الأكبر ، قد لا تعمل المستشعرات ، بسمك أصغر ، يمكن تقصيرها بنسيم.
يمكنك أخذ كرتون مموج 3 مم أو بلسا أو حتى صنع إطارات من مساطر عادية!
الشيء الرئيسي الذي يجب تذكره - سمك 4 مم - هو بالفعل الكثير ، فهو يتوقف عن العمل عند ستة!
حجم "النافذة" في الإطار - 9x9cm (عشرة أصلاً) صغير؟
إذا لم تتمكن من الوصول إلى العشرة الأوائل ، بالمعنى الحرفي والمجازي ، فمن السابق لأوانه الحديث عن الحاجة إلى الكرونومتر!
بعد ذلك - نقطع قطع رقائق الطعام 11x14 سم ، وباستخدام قلم لاصق منتظم ، نعلق بعناية على الإطارات على كلا الجانبين.
نقوم بربط الأخير بالقاعدة (الشريط) بحيث تكون المسافة بينهما 10 سم (قاعدة الكرونوغراف المضمنة في الرسم).
في الوقت نفسه ، يجب أن تكون الحزمة نفسها بالفعل 100 مم. لسمك إطار واحد (في الواقع ، الخشب نتيجة التجفيف في المستودع نفسه يتناقص في الحجم ؛-)
تصنع الإطارات على شكل حرف U لأسباب "إعادة استخدام" مجموعة واحدة من الرقاقة - بعد كل لقطة بمسطرة نرسم بين أزواج من اللوحات من أجل فتح التلامس في منطقة ثقوب الرصاص.
من أجل الراحة والبساطة في ضمان الاتصال بالرقائق ، تم صنع المشابك القائمة على مشابك الغسيل:

لقد أخذت زوجًا ملتويًا متعدد النواة كموصلات - لقد قمت بتدوير جميع النهايات (نتذكر أن النحاس والألمنيوم غير متصلين مباشرة!
لذلك اكتشفنا ذلك.
الآن دعنا ننتقل إلى وحدة التحكم الدقيقة - كل شيء كان يتم تصحيحه على arduino Uno (Atmega-328) 16Mhz + LCD Keypad Shield.
إذن نص الرسم (البرنامج):
// #include <LiquidCrystal.h> //! - !!! LiquidCrystal lcd(8, 9, 4, 5, 6, 7); // : // unsigned int data = 0; // volatile unsigned long int time1 = 0; volatile unsigned long int time2 = 0; void setup() { // LCD lcd.begin(16, 2); // attachInterrupt(0, sensor_1, FALLING); attachInterrupt(1, sensor_2, FALLING); // - pinMode(2, INPUT_PULLUP); pinMode(3, INPUT_PULLUP); } void loop() { lcd.setCursor(0, 0); lcd.print("CHRON 100mm base"); // nogood: // - - # CHRON if ( digitalRead(2) == LOW ) { lcd.setCursor(5, 0); lcd.print("#"); goto nogood; } else { lcd.setCursor(5, 0); lcd.print(" "); } // - - # base if ( digitalRead(3) == LOW ) { lcd.setCursor(11, 0); lcd.print("#"); goto nogood; } else { lcd.setCursor(11, 0); lcd.print(" "); } lcd.setCursor(0, 1); lcd.print("Speed "); lcd.setCursor(6, 1); lcd.print(data); lcd.setCursor(13, 1); lcd.print("M/S"); delay(100); while ( time1 == 0 && time2 == 0 ) ; delay(100); if ( time1 != 0 && time2 != 0 && time2 > time1 ) { data = 0.1 / ((time2 - time1) / 1000000.0); // v = s / t } // Serial.println(data) // - LiquidCrystal (lcd), // - Serial.println - Arduino IDE lcd.setCursor(6, 1); lcd.print(data); time1 = 0; time2 = 0; } void sensor_1() { if ( time1 == 0 ) { time1 = micros(); } } void sensor_2() { if ( time2 == 0 ) { time2 = micros(); } }
باختصار ، مبدأ التشغيل - أمر PULLUP في الدبابيس 2،3 يتحول إلى جهد السحب (مع المقاومات الداخلية 20-50 kOhm)
يؤدي التعداد النقطي إلى حدوث دارة قصيرة يتم اكتشافها بواسطة المقاطعات (سقوط الاستشعار) ، مثل أوامر arduino الأسرع.
معرفة فرق الوقت والمسافة بين أجهزة الاستشعار ، يتم حساب سرعة الرصاصة.
طلب مهم من أجهزة الاستشعار - الأول - للدبوس 2!
هذا كل شيء.

سيعترض شخص ما على أن الطاقة تنفق على اختراق الرقاقة ، وستكون السرعة الفعلية للرصاصة أعلى!
في البداية ، بدا كل شيء هكذا!
مقارنة بالسرعة التي تم قياسها قبل عام ونصف بواسطة جهاز مزود بأجهزة استشعار بصرية (280 م / ث) - أنتج الجهاز على الرقاقة 260!
بقوة - إنها 22 جول مقابل 19! - خسارة treshki على الفور!
ولكن بمجرد أن قمت بتخفيض القاعدة إلى 100 مم ، بدأ "الرقاقة" يظهر النتيجة الصحيحة - لماذا - لغز!
استخدمت الرصاصة Luman FT 0.56gram ، الأجهزة التي تعتمد على نفس المتحكم الدقيق ، والقاعدة في كلتا الحالتين هي 100 ملم ، بندقية واحدة

الآن ، حول استقرار القراءات - من بين 5 طلقات ، "الإصدار" هو واحد فقط في كل مرة ، وعدد الآخرين - يتفقون.
نعم ، وأخيرًا ، اسأل - لماذا في عصر الإلكترونيات لإعادة اختراع العجلة؟
كل شيء بسيط للغاية - الإجابة هي بندقية!
عند قياس سرعة الشحن عند المغادرة - لا توجد مشكلة - سيفعل أي جهاز!
ولكن على مسافة ، تتمتع اللقطة بالقدرة على التشتت (الهدف القياسي للتحقق من الشاش هو 75x75 سم).
والآن تخيل خيار قياس سرعة الشحن عند 35 مترًا - حتى إذا تمزق جهاز صيني مقابل 50 دولارًا ، فسيكون ذلك مهينًا.
المخرج هو إما "حجز" العلبة والمستشعرات (ألواح 40 مم كافية) ، أو استخدام أجهزة مستهلكة يمكن التخلص منها.
هناك ما ولماذا يقيس - ليس بعيدًا هو فرض حظر على صيد الرصاص في المسطحات المائية (بعد أوروبا) ، سيكون من الضروري استخدام طلقة فولاذية ، في المتاجر سيكون هناك خطوط لهذه الخراطيش (أو سعر مرتفع).
عند تجميع الخراطيش ذاتيًا ، لا أريد استخدام الأساليب القديمة لتقييم فعالية الدخول إلى لوح صنوبر جاف.
لقطات موجهة لك وللصيادين - ليس بو ولا ريشة!
حتى نلتقي مرة أخرى في هبر ، أندري.