الطائرات بدون طيار قادرة على الكثير من الأشياء: من تصوير التقارير وحفلات الزفاف إلى مراقبة مناطق الغابات للاستجابة بسرعة للحرائق ، وتتبع حالة شبكات الطاقة وخطوط أنابيب النفط. يمكن استخدام الروبوتات التي يمكن أن تطير في الداخل ، ولكن لهذا يجب أن تكون سريعة وقوية بما يكفي للتفاعل مع البيئة. للقيام بذلك ، قام الخبراء اليابانيون بإنشاء روبوت دراغون معياري يشبه اللامسة الطائرة ، والذي يغير شكله لاختراق ثقوب صغيرة وفي المستقبل يعمل كمتلاعب.
أثناء عمليات الإنقاذ ، قد يحتاج الروبوت إلى اختراق الباب ثم التغلب على العديد من العوائق الخطيرة الأخرى - عدم الاصطدام بجدار أو خزانة أو حجرة أو شخص. لحل هذه المشكلة ، يمكنك إنشاء روبوت صغير جدًا يطير إلى أي فتحة. لكنها ستناسب فقط للملاحظة. يمكنك تجهيز الطائرة بدون طيار بإطار وقائي - لكن مثل هذه الطائرة الضخمة لن تكون قادرة على التفاعل مع البيئة بشكل جيد للغاية ، وهذا مرة أخرى سيساعد فقط في عمليات البحث. من الناحية المثالية ، يجب أن يكون الروبوت صغيرًا وذكيا ، ولكنه قوي بما فيه الكفاية.
أنشأ
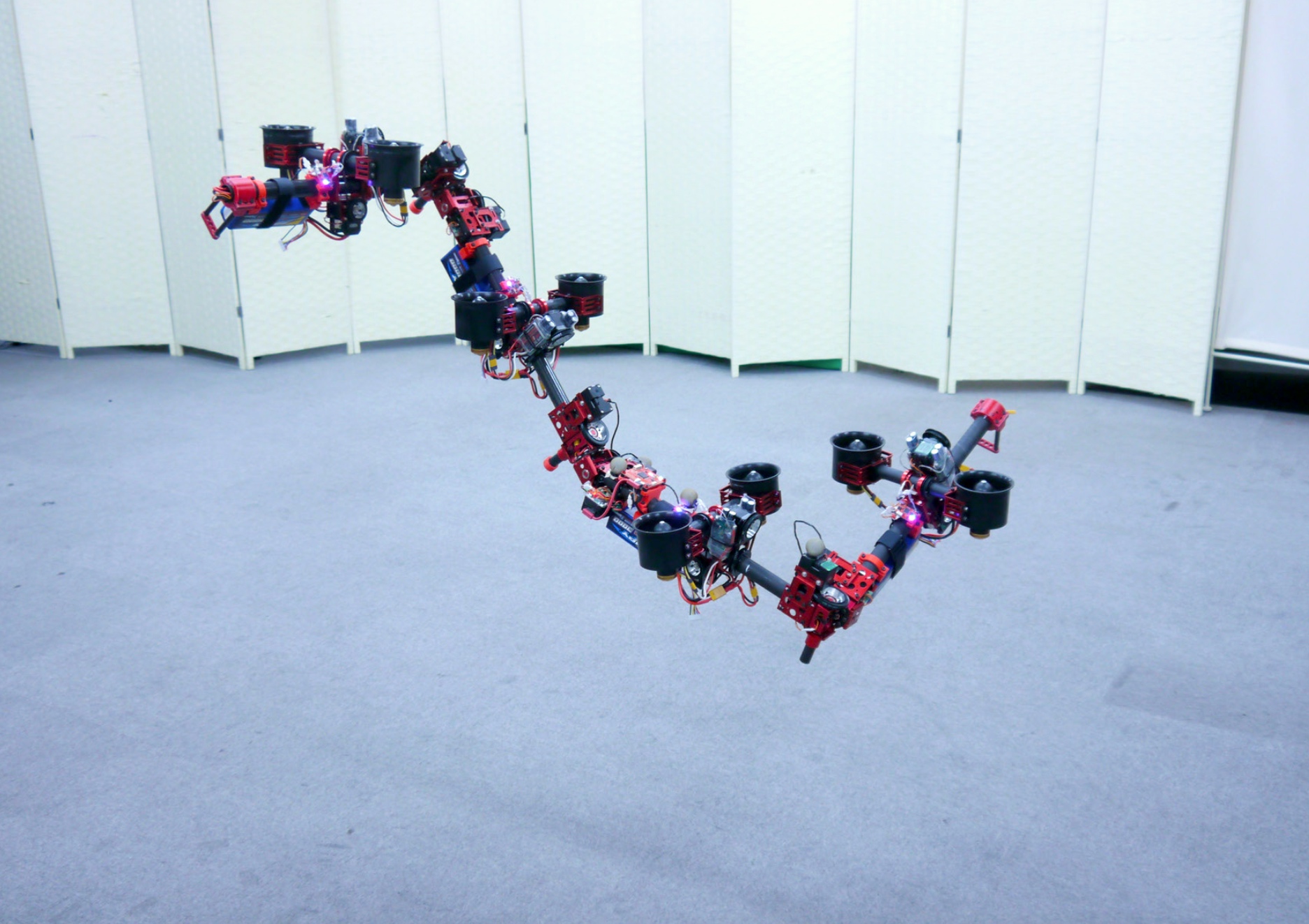
مختبر JSK في جامعة طوكيو للروبوتات روبوت DRAGON ، الذي يرمز إلى روبوت متعدد الارتباطات ثنائي الدوار مضمن مع القدرة على تحويل جوي متعدد الحرية. يغير الجهاز المعياري شكله على الطاير - يتحول من مروحية مربعة إلى ثعبان رقيق ، مما يسمح له بالاختراق في ممرات ضيقة أو اتخاذ شكل مختلف.
يتكون DRAGON من وحدات ، تم تجهيز كل منها بزوج من المراوح في الطوق الحلقي. يغير المشجعون موضعهم ، مما يتسبب في تحرك الوحدات في اتجاهات مختلفة ، بحيث يمكن للروبوت أن يطير بأي شكل تقريبًا سيسمح له بعمل درجات من الحرية. الوحدات متصلة بواسطة حوامل دوارة. يعمل الجهاز على أساس كمبيوتر
Intel Euclid صغير الحجم. تستمر البطارية لمدة ثلاث دقائق من الطيران ، وعلى العلماء العمل على تحسين هذا المؤشر. يمكن افتراض أن الجهاز سيتم تسجيله بواسطة الكابل ، ولكن في هذه الحالة سوف يفقد القدرة على المناورة ، أو سيتم العثور على مصادر طاقة مستقلة أخرى.
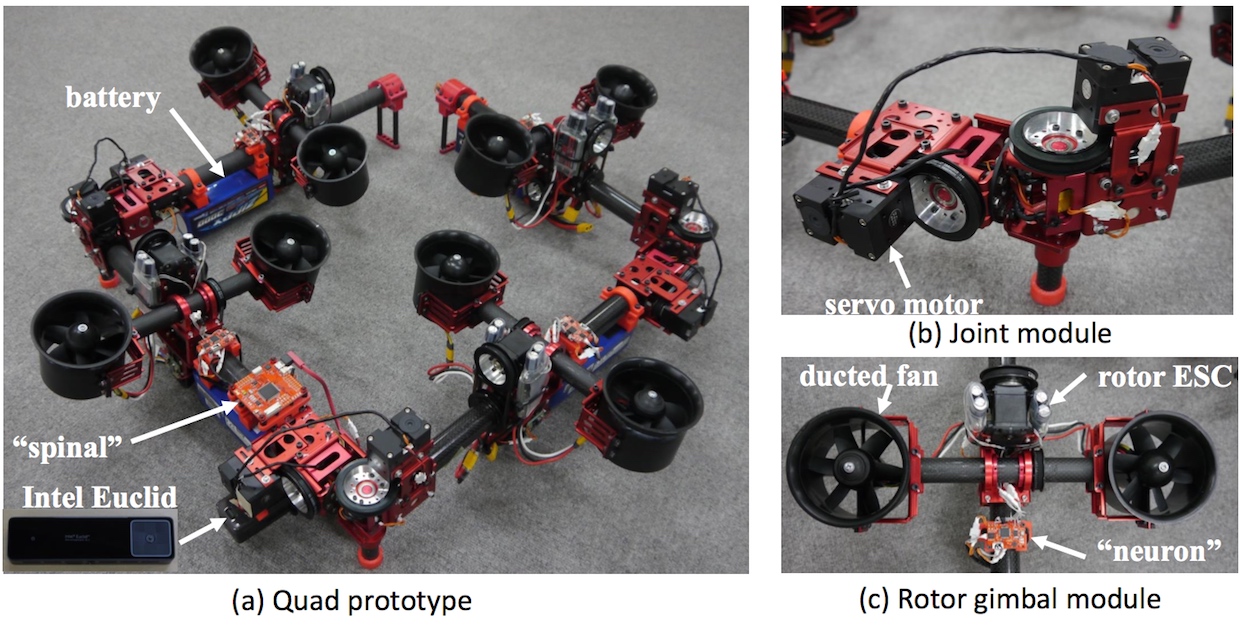
نموذج أولي من أربع وحدات مجهزة بما مجموعه ثمانية مراوح. كانت إحدى مهام المطورين هي تصميم برنامج يتيح للروبوت أن يقرر بشكل مستقل الشكل الذي يجب اتخاذه في حالة معينة. في الفيديو ، أظهر المطورون كيف أن روبوتًا على شكل ثعبان يطير عبر "فتحة" صغيرة.
في المستقبل ، سيتكون الروبوت من اثني عشر وحدة ، وفي نفس الوقت سيكون قادرًا على رفع الأشياء باستخدام الوحدات المتطرفة كقبضة بإصبعين. يمكن افتراض أن مثل هذا الروبوت يمكن أن يلتف حول كائن لنقله ، أو يتفاعل مع محيطه.
تستخدم الروبوتات الطائرة لعمليات الإنقاذ والمراقبة. في المساحات المفتوحة ، يمكن أن تطلق الطائرات الرباعية
غرقًا عائمًا في الحياة ،
وتوصيل جهاز إزالة الرجفان إلى شخص ما ، ومراقبة ما يحدث من أجل العثور على الأشخاص المفقودين ومراقبة التضاريس أثناء حالات الطوارئ من أجل استجابة سريعة. في حالة المساحات المغلقة ، هناك نماذج أولية للروبوتات السربنتين - على سبيل المثال ، الروبوت اللين من الباحثين في
جامعة ستانفورد الذي يغير حجم ، ويمتد ، ينحني ويأخذ الأشياء ، يرتفع إلى ارتفاع كبير ، يمكن أن يصعد إلى فتحات صغيرة جدًا ، أو ، على سبيل المثال ، تحت صندوق يصل إلى 100 كيلوغرام لرفعه. حتى أن القشرة الناعمة تمر من خلال الأشياء الحادة مثل المسامير وتتغير شكلها - تضخ المضخات الهواء في السكن.
تم إنشاء
جهاز بطول 8 أمتار من مطورين يابانيين من جامعة توهوكو للبحث عن الأشخاص في الزلازل. يتحرك الروبوت بسرعة تصل إلى 10 سم في الثانية ، "بالإصبع" السطح الخشن. تم استخدام نسخة مبكرة من هذا الروبوت أثناء تصفية نتائج
الكارثة في محطة فوكوشيما للطاقة النووية ، لكنها تحركت بشكل رئيسي في اتجاه واحد - إلى الأمام. تحول الروبوت الجديد ليكون أكثر قدرة على الحركة.
كانت هناك محاولات للجمع بين الروبوتات الطائرة والأفعوانية.
توفر طائرة رباعية من علماء جامعة بنسلفانيا في الموقع روبوتين ثعبانين يمكنهما تحريك الدرج أو اختراق الشقوق.
سيجمع النموذج الأولي من JSK Lab بين مزايا الروبوتات الطائرة والأخرى السربنتينية وسيتفاعل بطرق مختلفة مع الأشياء ، بدلاً من الانخراط في المراقبة فقط. يصف أحد موظفي مختبر JSK DRAGON بأنها "اختراقًا من حيث التصميم الهيكلي" و "منصة مثالية لمناورات الهواء".