القسم 1. الملاءمة
في الوقت الحالي ، يعد تخثر الدوالي الوعائي بالليزر (EVLK) علاجًا حديثًا وفعالًا للدوالي. يتضمن تكوين الأجهزة الطبية للتخثر بالليزر في الدوالي أداة من الألياف (الألياف) مع خرج إشعاعي شعاعي (الشكل 1) ، يؤثر من خلاله الإشعاع مباشرة على الأنسجة البيولوجية. تعتمد فعالية وسلامة العلاج على تكوين وجودة معالجة هذه الأداة.
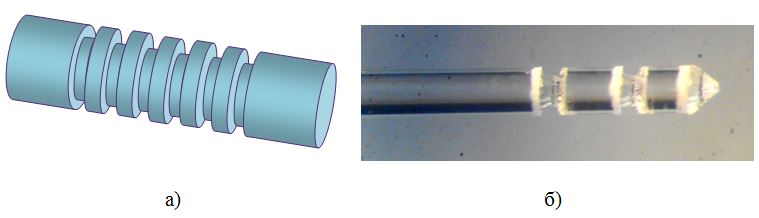 التين .1 تخفيف محتمل لألياف دليل الضوء: أ) - نموذج قطعة العمل ، ب) صورة مكبرة لقطعة العمل المجهزة
التين .1 تخفيف محتمل لألياف دليل الضوء: أ) - نموذج قطعة العمل ، ب) صورة مكبرة لقطعة العمل المجهزةللمعالجة بواسطة أشعة الليزر ، يتم تركيب الألياف الضوئية في خرطوشة الكام لمخرطة خاصة. تتضمن عملية التثبيت تثبيت القاعدة. يختلف الموقع الفعلي لقطعة العمل المثبتة عن الوضع المطلوب بمقدار معين من الانحراف - خطأ التثبيت:
\ تبدأ {eqnarray}
\ triangle \ varepsilon_y & = & f (\ triangle \ varepsilon_، \ triangle \ varepsilon_) ،
\ إنهاء {eqnarray}
-
- خطأ في القاعدة ، مم ؛
-
- خطأ التثبيت ، مم.
في عملية الإنتاج الضخم ، يتم تثبيت الألياف المعالجة بدون محاذاة. في الحالة العامة ، لا يتزامن المحور الهندسي للألياف مع محور دوران الخرطوشة ، مما يؤدي إلى نفاذ L أثناء دوران الشغل.
أظهرت البيانات التجريبية الخاصة بقياسات الضرب عند تثبيت أقطار مختلفة من الألياف المعالجة أن قيمته يمكن أن تصل إلى 250 ميكرومتر ، وهو ما لا يسمح بمعالجة الألياف بإشعاع الليزر بدقة كافية للاستخدام العملي. القضاء على الضرب الناتج عن تعديل فكوك الظرف غير مقبول بسبب التعقيد العالي ، والوقت الذي تستغرقه ، والتقييم الشخصي الكبير للشخص - مشغل الماكينة في كفاية القضاء على الضرب. لذلك ، يتم طرح مهمة عاجلة: لتطوير مبدأ يوفر تعويضًا عن نفاد التيار أثناء معالجة الألياف.
القسم 2. وصف التثبيت
آلة المعالجة بالليزر للألياف هي طاولة آلية ، توفر حركة الألياف في المحاور الطولية الثلاثة X و Y و K والدوران في المحاور E و W (الشكل 2).
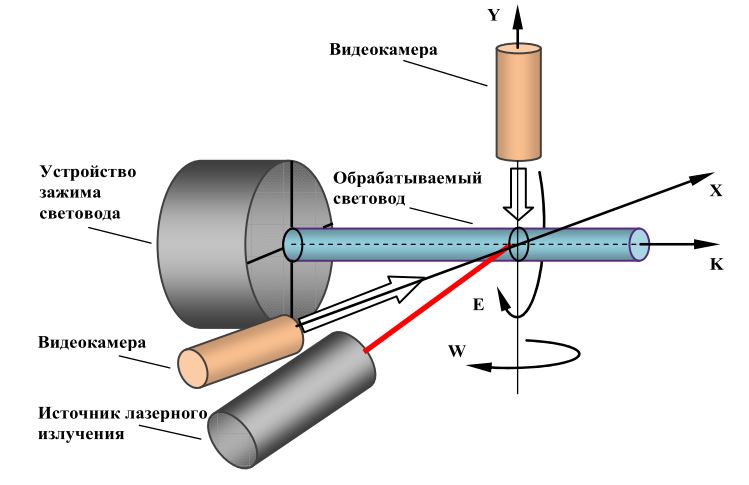 التين. 2 - رسم توضيحي لمخطط التركيب
التين. 2 - رسم توضيحي لمخطط التركيبيتم توفير الحركة على طول محاور X و Y و K بواسطة محرك تروس البخار ، على طول المحورين E و W - المحرك. المحرك عبارة عن محرك متدرج يتم التحكم فيه بواسطة جهاز تحكم محلي - سائق (توشيبا TB6600HG). إشارات إدخال السائق هي إشارتان على مستوى TTL توفران اتجاه وسرعة دوران محرك السائر. يتم ضبط سرعة الدوران من خلال معدل تكرار النبضات المستطيلة. يتم توصيل عمود خرج المحرك لكل من المحاور X ، Y ، K بشكل صارم بعلبة التروس ، مما يوفر تغييرًا في نوع الحركة الدورانية عند الإدخال إلى الترجمة عند خرجها. الحركة على طول محاور X ، Y ، K محدودة على كلا الجانبين بواسطة أجهزة استشعار نهاية. نظام التحكم في الموضع على كل محور مفتوح. يتم عرض المعلمات التقنية لمحركات المحور في الجدول. 1.
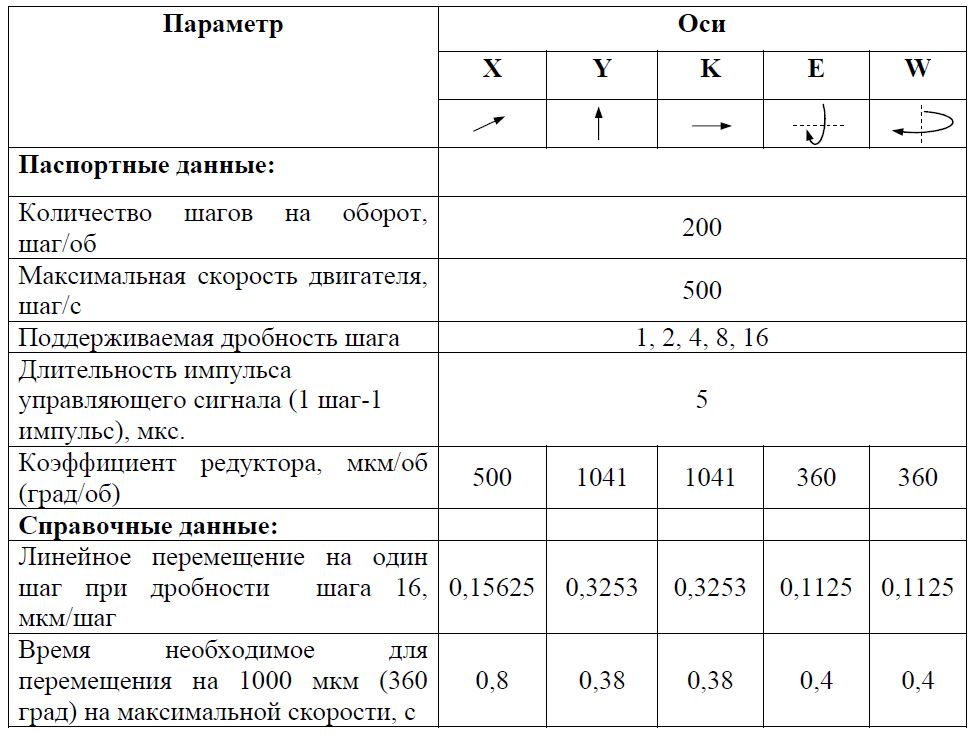
علامة تبويب. 1 - المعلمات الفنية لمحركات المحور
كائن المعالجة عبارة عن ألياف يبلغ قطرها 330 ميكرومتر ، ويتم تثبيتها في جهاز تثبيت - خرطوشة (الشكل 2). توفر الخرطوشة ربط الألياف وتدويرها.
أداة المعالجة هي ليزر CO2 بطول موجة 11 ميكرون.
القسم 3. تعويضات فوز
3.1 بيان المشكلة
عند لقط قطعة عمل - ظرف الألياف في الجهاز ، مركزها
يحصل على تعويض - L نسبة إلى مركز خرطوشة - نقطة
(مركز نظام الإحداثيات). هذا الإزاحة له معنى مختلف لكل تركيبات. عند تدوير الشكل 4 أ ، مركز الألياف
يصف دائرة نصف قطرها L - مقدار التدفق. المهمة هي تقليل كمية ضربات القلب.
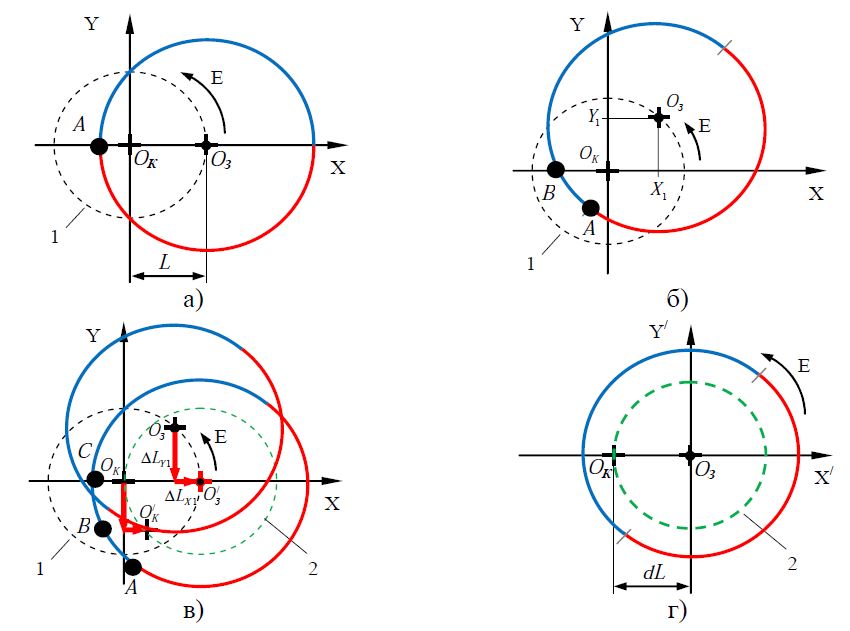 التين. 4 - الموقع النسبي لمحور الخرطوشة والألياف الثابتة أثناء الدوران: أ) مقدار النفاد عند تثبيت العينة في خرطوشة الجهاز ؛ ب) دوران الخرطوشة بمقدار 45 درجة في خطوة واحدة من المحرك ؛ ج) إدخال تعديلات تصحيحية على موضع محور الخرطوشة ؛ ز) حركة محور الخرطوشة بالنسبة للمحور الثابت للألياف مع تعويض كل خطوة في المحرك.
التين. 4 - الموقع النسبي لمحور الخرطوشة والألياف الثابتة أثناء الدوران: أ) مقدار النفاد عند تثبيت العينة في خرطوشة الجهاز ؛ ب) دوران الخرطوشة بمقدار 45 درجة في خطوة واحدة من المحرك ؛ ج) إدخال تعديلات تصحيحية على موضع محور الخرطوشة ؛ ز) حركة محور الخرطوشة بالنسبة للمحور الثابت للألياف مع تعويض كل خطوة في المحرك.3.2 مبدأ الحل المقترح
ضع في اعتبارك حركة الألياف في المستوى
عندما يدور حول محور خرطوشة - نقطة
.
دع محور الشغل في اللحظة الأولى يكون نقطة
يقع على المحور X ولديه إحداثيات (L ، 0) ويضرب شعاع الليزر سطح الألياف عند النقطة A (الشكل 4 أ).
من أجل الوضوح ، قم بتدوير الخرطوشة بزاوية
في خطوة واحدة من المحرك (الشكل 4 ب). في هذه الحالة:
- نقطة
يحصل على الإحداثيات
؛
- سيأخذ إسقاط القيمة النهائية L على المحور X و Y القيم
،
؛
- يتحرك شعاع الليزر على طول سطح الألياف إلى النقطة B.
عندما يتم تحويل الألياف لتعويض مقدار النفاد ، سنحتاج إلى إعادة إحداثيات النقطة
إلى موقع البداية بإحداثيات (L ، 0). لهذا ، من الضروري إجراء تصحيحات تصحيحية لموضع نقطة الخرطوشة على طول محوري X و Y في الشكل 4 ج حسب حجم الإسقاط
،
. يتم إجراء هذه التصحيحات التصحيحية بسبب محركات السائر للمحاور X و Y. في هذه الحالة ، النقطة
مرة أخرى سيكون لها الإحداثيات الأصلية (L ، 0) ، وضرب شعاع الليزر على النقطة C من سطح الألياف.
أثناء الدوران اللاحق ، ستكون هناك حاجة إلى حركات تصحيحية جديدة لمحور الخرطوشة. في هذه الحالة ، النقطة
يتحرك محور الخرطوشة حول الدائرة 2 (الشكل 4 د). قيمة نصف قطر الدائرة 2 تساوي مقدار الضرب L. مع حل المشكلة هذا ، يكون محور الألياف في حالة عدم الحركة النسبية بالنسبة لمحورها ، ويتحرك محور الخرطوشة حول المحيط ، لذلك سننظر في دوران الألياف في المستوى
بالنسبة للنقطة
عن طريق تحريك نظام الإحداثيات لهذا (الشكل 4 د).
3.3 التبرير الرياضي للحل المقترح
يفترض مبدأ الضرب المدروس وجود قيم معروفة للحركات التصحيحية
،
(زيادات في التشغيل) للخرطوشة في كل خطوة (i + 1) من محرك السائر أثناء دوران دليل الضوء. لتحديدها ، نعتبر الشكل 5.
 التين. 5- قيم الإسقاط أثناء دوران الألياف الضوئية بالنسبة لمحور الخرطوشة في عكس اتجاه عقارب الساعة (الاتجاه الإيجابي)
التين. 5- قيم الإسقاط أثناء دوران الألياف الضوئية بالنسبة لمحور الخرطوشة في عكس اتجاه عقارب الساعة (الاتجاه الإيجابي)في كل خطوة تالية من محرك السائر ، سيتلقى محور الدوران E زيادات بسبب الضرب L:

أين الإحداثيات
يتم تحديدها من هندسة الإزاحة (الشكل 5):


عرض رسومي لتغيير الزيادة
لكل خطوة أنا عند الدوران عكس اتجاه عقارب الساعة (انكسار الخطوة في E = 4) بضرب 50 ميكرومتر موضح في الشكل 6.
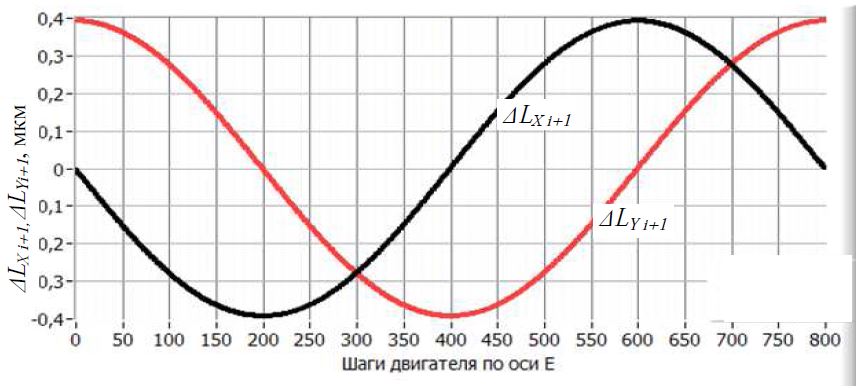 التين. 6 - التغيير في قيم الإسقاطات (الإزاحة) لكل خطوة من خطوات المحرك على طول محوري X و Y بسبب الضرب عندما تدور الألياف الضوئية 360 درجة في عكس اتجاه عقارب الساعة (كسور الخطوة على طول E = 4) عند ضرب 50 ميكرون.
التين. 6 - التغيير في قيم الإسقاطات (الإزاحة) لكل خطوة من خطوات المحرك على طول محوري X و Y بسبب الضرب عندما تدور الألياف الضوئية 360 درجة في عكس اتجاه عقارب الساعة (كسور الخطوة على طول E = 4) عند ضرب 50 ميكرون.في حالة عدم وجود تعويض ، التكامل العددي في ظل الظروف الأولية المقابلة للتعبيرات
سيعطي الإسقاط الحالي على محور الشكل 7
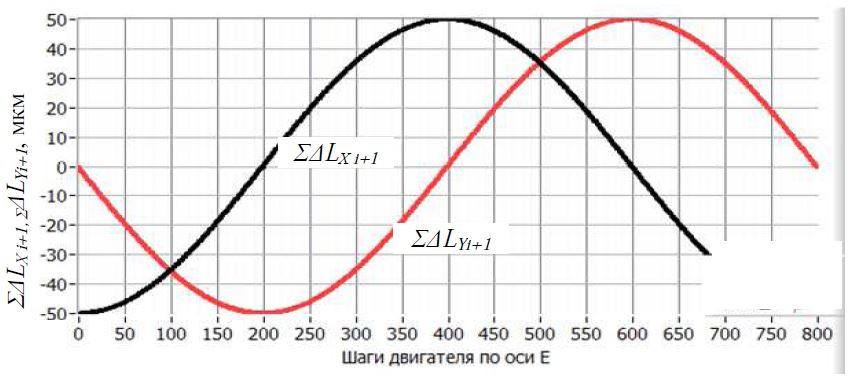 التين. 7 - الإسقاطات الحالية للنزوح لكل خطوة من المحرك على طول المحورين X و Y بسبب الضرب عندما تدور الألياف الضوئية 360 درجة عكس اتجاه عقارب الساعة (كسور الخطوة في E = 4) عند الضرب L = 50 ميكرومتر.
التين. 7 - الإسقاطات الحالية للنزوح لكل خطوة من المحرك على طول المحورين X و Y بسبب الضرب عندما تدور الألياف الضوئية 360 درجة عكس اتجاه عقارب الساعة (كسور الخطوة في E = 4) عند الضرب L = 50 ميكرومتر.في عملية التناوب ، مع تراكم كمية الضرب أكثر من حجم عمل التحكم يجب أن يخضع لتعويضه. هذا يعكس الشرط التالي:

أين
- قيمة الإزاحة الخطية على طول المحور X في خطوة واحدة من المحرك:
- مقدار الإزاحة الخطية على طول المحور Y في خطوة واحدة من المحرك.
يمكن تعديل الشرط (4) للحصول على خطأ أصغر في التعويض عن النفاد.
في وجود البقول التعويضية ، النزوح الكلي
،
انخفاض - الشكل 8.
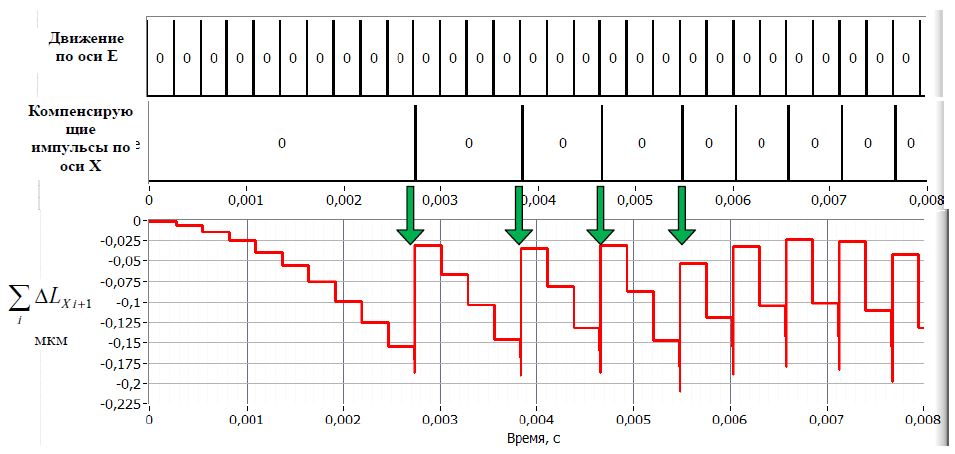 التين. 8
التين. 8 - تغيير مقدار الإزاحة
على طول المحور "س" أثناء الدوران على طول المحور "E" أثناء تعويض الجريان السطحي. Runout L = 50 μm ، الزاوية الأولية
= 0.
3.4 تقييم الفعالية
الصورة العامة لعملية تعويض الإيقاع بقيمة L = 50 ميكرومتر عند التشغيل
مع المبدأ المقترح معروض في الشكل. 9.
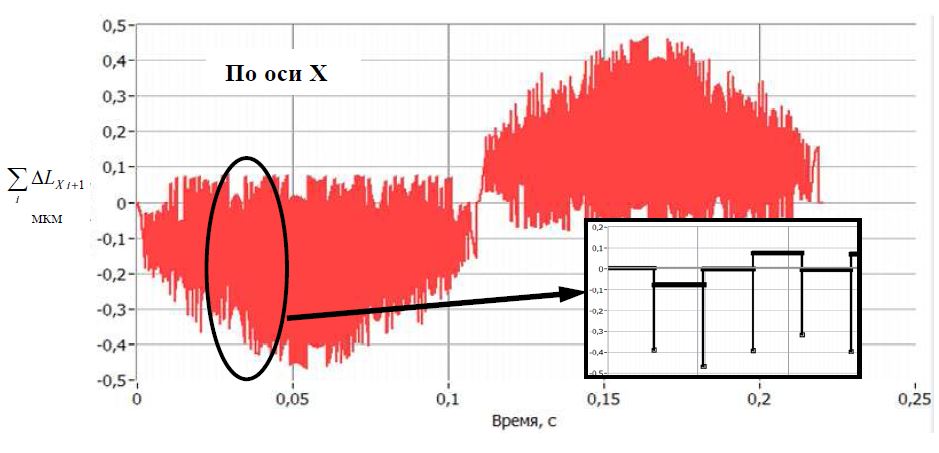
أ)
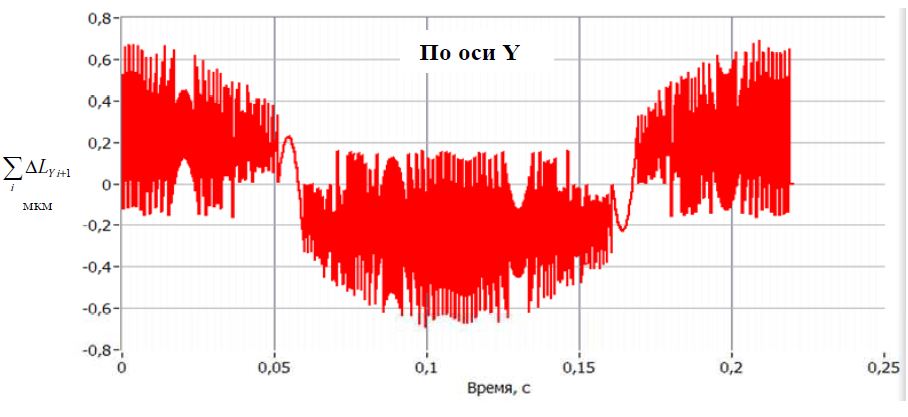
ب)
التين. 9 - قيم الإزاحة على طول المحاور عند تعويض الجريان L = 50 ميكرومتر لكل ثورة من الألياف: أ) للمحور X ، ب) للمحور Yيقترح تقييم كفاءة تعويض الإيقاع بمعامل يساوي نسبة الإزاحة القصوى على طول المحور في عملية التعويض إلى قيمة نفاذ الجدول 2.
علامة تبويب. 2 - كفاءة تعويضات الضربات
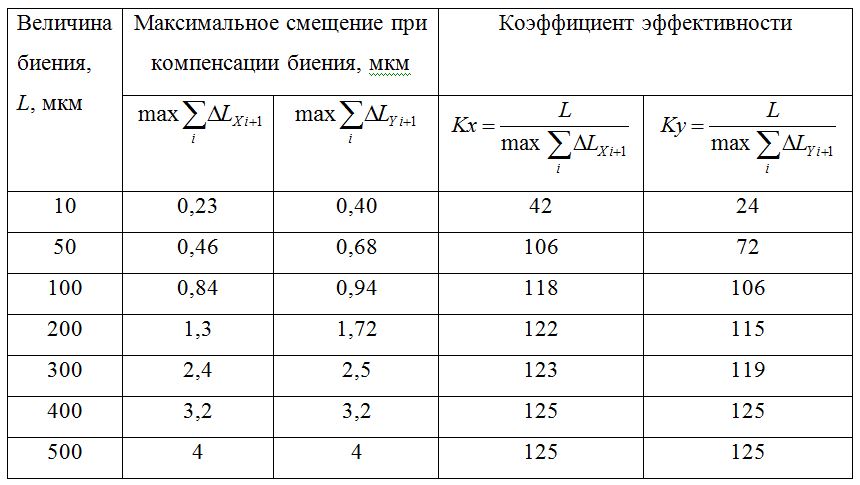
التعويضات القصوى المقدرة
،
بالنسبة للقيم المعروضة للنقرات والتشغيل العملي للتركيب مع المبدأ المقترح للتعويض عن الضربات أظهرت إمكانية تطبيق الإغاثة على الألياف باستخدام إشعاع الليزر بدقة كافية للاستخدام العملي.
وتجدر الإشارة إلى أنه عند معالجة الألياف بإشعاع الليزر مع التعويض عن الجريان ، فإن وقت ثورة واحدة للألياف بالنسبة لمحورها سيعتمد على كمية الجريان وتختلف لكل علاج. على سبيل المثال ، بضرب 50 ميكرون ، فإن وقت دورة كاملة:
- بدون تعويض عن النفاد: 400 مللي ثانية ؛
- مع تعويض ضربات: 560 مللي ثانية.
يجب أن تؤخذ هذه الحقيقة في الاعتبار عند ضبط قوة أشعة الليزر.
القسم 4. تحديد النفاد
لتنفيذ المبدأ المعروض لتعويض الضرب ، من الضروري معرفة قيمته - L. يقترح تحديد مقدار الضرب بواسطة نظام المراقبة بالفيديو (كاميرا الفيديو 1 في الشكل 1). في الشكل. 10. يتم تقديم نموذج فيديو من كاميرا فيديو بشكل تخطيطي.
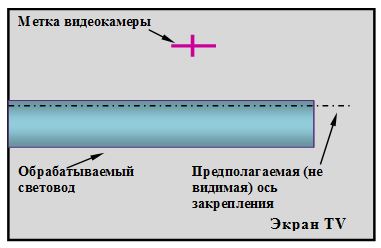 التين. 10 - الموقع التعسفي للألياف الثابتة على شاشة العرض
التين. 10 - الموقع التعسفي للألياف الثابتة على شاشة العرضلتحديد قيمة التشغيل ، من الضروري تنفيذ الخطوات التالية بالترتيب المشار إليه:
- قم بتدوير الألياف (المحور E) إلى أقصى تقريب تقريبًا للعلامة على الشاشة (الشكل 11 أ) ؛
- تحريك الألياف على طول إحداثيات المحور X حتى تتماشى مع العلامة (الشكل 11 ب) ؛
- قم بتدوير الألياف (الشكل 11 ج) ؛
- تنفيذ حركة الألياف على طول إحداثيات المحور X لتتماشى مع العلامة مع تذكر المسافة المقطوعة R (حساب عدد نبضات حركة محرك السائر) الشكل. 11 جم ؛
- احسب قيمة الجريان L = R / 2.
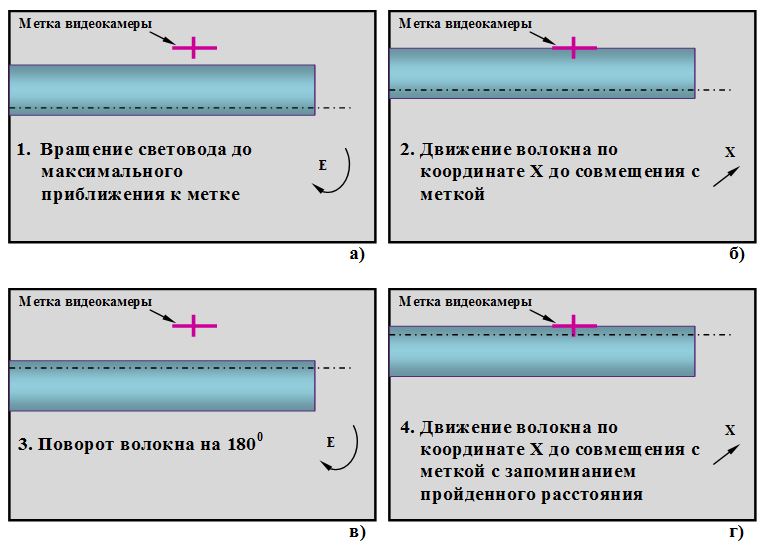 التين. 11- مراحل تحديد كمية نفاذ الألياف
التين. 11- مراحل تحديد كمية نفاذ الأليافالقسم 5. الخلاصة
تم تطبيق مبدأ تعويض الضرب المقترح على منصة برمجيات National Instruments LabVIEW ، وتم اختباره وتنفيذه وأظهر فعاليته (الشكل 12).
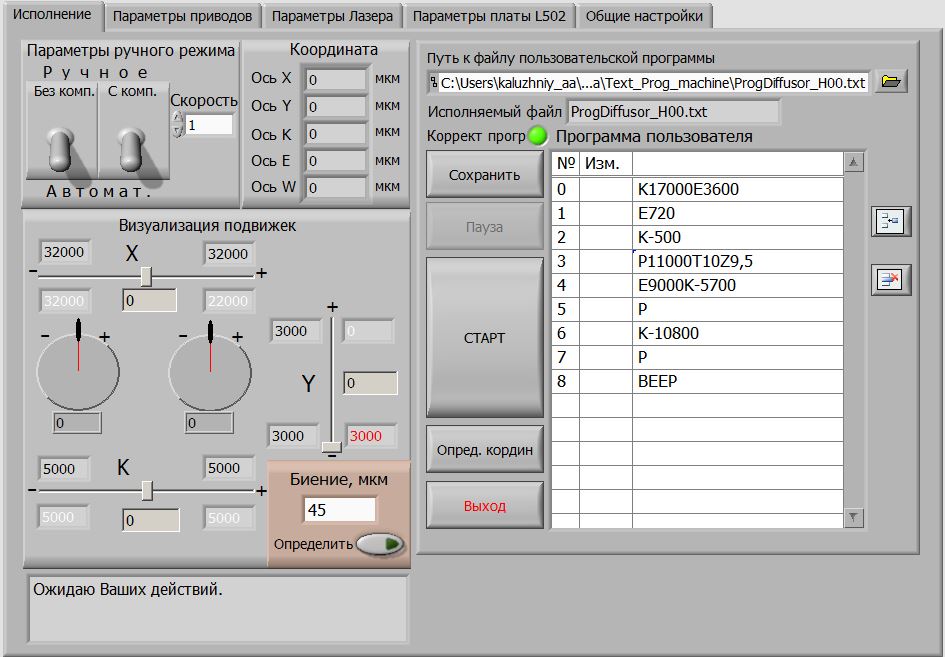 التين. 12- اللوحة الأمامية للبرنامج
التين. 12- اللوحة الأمامية للبرنامج