في
المنشور الأخير
، تحدثنا عن مشاريع الروبوتات الفكرية التي تهم بنك سبيربنك. اليوم سنقوم بتحليل الكوبوتات: التاريخ ، التصنيف ، كيف يمكن كسبها أو استخدامها لحل مشاكلهم.
 المصدر: Universal Robots
المصدر: Universal Robotsالجزء 1. ما هو كوبوت
فقط للاتصال بك التعاونية الروبوت الخاص بك لا يكفي. يجب أن تلبي متطلبات المعايير الدولية ،
وأهمها ISO / TS 15066: 2016 (التناظرية الأمريكية
ANSI / RIA TR R15.606: 2016 ). على الرغم من أنه سيكون من الأصح القول أن هذا ليس معيارًا ، ولكنه مواصفة فنية. هناك اختلاف: تقوم ISO أحيانًا بتطوير المواصفات الفنية قبل إصدار المعايير الرسمية النهائية. هذا اعتراف بحقيقة أن الحالة الحالية للروبوتات التعاونية ديناميكية وستتطور بمرور الوقت.
هناك حاجة إلى تنسيق المواصفات الفنية لإصلاح حالة "هنا والآن" حتى يتمكن المجتمع من العمل ، مع العلم أنه ستكون هناك تغييرات في المستقبل.
وفقًا لـ ISO ،
الكوبوت (اختصار
للروبوت التعاوني ) هو روبوت مصمم للتفاعل المباشر مع شخص داخل مساحة مشتركة معينة.
يمكن استخدام روبوت تعاوني للتعاون (
ISO 10218 ).
التعاون هو الحالة التي يعمل فيها نظام روبوتي مصمم خصيصًا وعامل تشغيل في إطار منطقة عمل مشتركة.
مساحة مشتركة - مساحة عمل محمية يمكن فيها للروبوت والشخص أداء المهام في وقت واحد أثناء عملية التصنيع.
على الأرجح لديك أسئلة:
- هل سيصبح الروبوت متعاونًا إذا قمت بإزالة السياج الواقي من الروبوت الصناعي التقليدي؟ لا
- هل سيصبح الروبوت متعاونًا إذا حددت قوة وقوة المتلاعب؟ لا ، لأن جسم حاد ، حتى مع قوة قليلة ، يمكن أن يسبب الضرر للشخص
- إذا كان الروبوت تعاونيًا ، فهل هذا يعني أنني لست بحاجة إلى إجراء تقييم للمخاطر؟ تقييم المخاطر يجب القيام به.
ببساطة ، هذا روبوت يمكنه أداء المهام في مساحة مشتركة مع شخص ، دون إيذائه ، أي أن
العثور على شخص في منطقة عمل كوبوت آمن تمامًا . اختلافات الكوبوت عن الروبوت الصناعي المعتاد:
- كثير منها أرخص من الروبوت الصناعي المعتاد: 24 ألف دولار بدلاً من 40 + ألف دولار ؛
- أسهل في التثبيت والتهيئة (تزن الروبوتات حوالي 30 كجم ، ما عليك سوى مقبس 220 فولت ، وهناك واجهة مستخدم رسومية) ؛
- إنه مرن ، من السهل تغييره (واجهات برمجة بديهية ، إنه غير آمن للإنسان والبيئة.
في السابق ، كانت وسائل حماية الأشخاص تتمثل في فصلهم عن المعدات الآلية بأجهزة حماية مادية ، مثل الخلايا.

 Pixabay.comControleng.com
Pixabay.comControleng.comمع ظهور الأنظمة الآلية التعاونية ، تحول هذا النموذج: الآن يمكنك العمل معًا.

 www.objektifhaber.com/aslan-gibi-dostluk-94036-haberwww.ge.com/reports/3-1b-collaborative-co-bot-market-isnt-hazard-freeلماذا هذا جيد؟
www.objektifhaber.com/aslan-gibi-dostluk-94036-haberwww.ge.com/reports/3-1b-collaborative-co-bot-market-isnt-hazard-freeلماذا هذا جيد؟ لأننا نحصل على تآزر بين نقاط القوة في الروبوت (السرعة العالية والدقة عند إجراء العمليات الروتينية) والبشر (التفكير الإبداعي ، العمل في المواقف غير القياسية). وهذا يزيد من الإنتاجية في الصناعة ، مما يعني أن لها تأثيرًا إيجابيًا على الاقتصاد ككل.
ISO / TS 15066: 2016 هي المواصفات الأولى في العالم لمتطلبات السلامة للروبوتات التعاونية. تم تطوير الوثيقة من قبل لجنة (ضمت خبراء من 24 دولة وشركات تصنيع رائدة) ISO منذ عام 2010. الغرض منه هو تكملة متطلبات وتوصيات التشغيل المشترك للروبوت الصناعي الموصوف في ISO 10218-1 و ISO 10218-2 ("متطلبات السلامة للروبوتات الصناعية") ، ويحدد ISO / TS 15066 متطلبات السلامة للتشغيل المشترك للأنظمة الروبوتية الصناعية والعمل الأربعاء. توفر الوثيقة إرشادات لأولئك الذين يجرون تقييمات للمخاطر عندما يعمل الأشخاص والروبوتات معًا.
وفقًا لمعيار ISO / TS 15066 ، هناك 4 أشكال من التعاون:- توقف خاضع للتحكم ( توقف مراقب مصنف حسب السلامة) ؛
- توجيه يدوي ؛
- مراقبة السرعة والفصل
- الحد من القوة والقوة
دعونا نفكر في كل واحد منهم بمزيد من التفصيل.
توقف مراقبة تصنيف السلامةيتم استخدام هذا النموذج عندما يعمل الروبوت بشكل أساسي من تلقاء نفسه ، ولكن في بعض الأحيان يحتاج الشخص إلى دخول مساحة العمل. على سبيل المثال ، يقوم الروبوت بمعالجة قطعة عمل ، ولكن في منتصف العملية التكنولوجية ، يجب على الشخص إجراء عملية معها لا يستطيع الروبوت القيام بها. إذا دخل الشخص إلى منطقة أمنية محددة مسبقًا ، فسيتوقف الروبوت عن الحركة. في الوقت نفسه ، لا تختفي الطاقة على المحركات - تتوقف مؤقتًا. هذه نقطة مهمة للغاية ، لأنه بعد مغادرة الشخص لمنطقة الأمان ، سيستأنف الروبوت العمل على الفور. هذا يسمح لك بعدم إضاعة الوقت في إعادة تشغيل برنامج العمل بالكامل ، كما هو الحال مع التوقف الكامل للروبوت. إذا مر الناس باستمرار بالروبوت ، فلن يكون لديه ببساطة وقت للعمل.
- يتم توفير التوقف دون فقدان قوة المحرك (توقف مؤقت ، وليس توقف).
- يمكن للمشغل التفاعل مع الروبوت.
- قد يستأنف العمل التلقائي عندما يغادر الشخص مساحة العمل.
- في لحظة واحدة ، يمكن للشخص أو الروبوت التحرك.
- يمكن استخدامه مع الروبوتات الصناعية العادية ، ولكنك تحتاج إلى إضافة حواجز أمان خفيفة (محددات الليزر ، كاشفات الصور).
توجيه يدوييُستخدم هذا النوع من التعاون لعمليات دقيقة مع الأشياء الثقيلة (على سبيل المثال ، تركيب أبواب السيارة). يمكن استخدام هذا النموذج للعمل مع الروبوتات الصناعية العادية ، ولكن مع جهاز إضافي "يستشعر" القوى التي يطبقها العامل على المناور ، عادة ما يكون هذا مستشعر عزم الدوران على شفة الروبوت.
- عامل الهاتف على اتصال مباشر مع الروبوت.
- الروبوت تحت التحكم اليدوي.
- يمكن لكل من البشر والروبوتات التحرك في وقت واحد (يتحكم البشر في الحركات).
- يمكن استخدام الروبوتات الصناعية العادية.
- المعدات الإضافية المطلوبة (مستشعر عزم الدوران).
مراقبة السرعة والفصلهنا ، يتم التحكم في بيئة الروبوت بواسطة حواجز أمان خفيفة ، والتي تتتبع وضع الأشخاص ، كما هو الحال في الشكل الأول من التعاون. يكمن الاختلاف في السيناريو: إذا كانت المهمة الرئيسية للروبوت في الشكل الأول هي التوقف ، فهنا هو العمل المتزامن للشخص والروبوت. سيعتمد سلوك الروبوت على المناطق التي تم تكوينها مسبقًا في برنامج التحكم الخاص به: مع اقتراب الشخص ، يقلل الروبوت من سرعة تحركاته ، وإذا اقترب الشخص لدرجة أن التصادم أمر لا مفر منه ، يحدث توقف. عندما يتحرك الشخص بعيدًا ، يستأنف الروبوت العمل ويتسارع.

- تقل سرعة الروبوت مع اقتراب الشخص.
- يتوقف الروبوت عند حدوث تصادم مع شخص.
- يمكن للشخص والروبوت التحرك في وقت واحد.
- يمكن استخدامه مع الروبوتات الصناعية العادية ، ولكنك تحتاج إلى إضافة حواجز أمان خفيفة (محددات الليزر ، كاشفات الصور).
- تستخدم للعمليات التي تتطلب التواجد المتكرر للأفراد.
الصورة: روبرتا نيلسون شيا - "ISO / TS 15066 مقدمة"يمكن استخدام جميع أشكال التعاون الثلاثة الموضحة أعلاه مع الروبوتات الصناعية التقليدية ، رهنا بتوافر أجهزة إضافية. تسمى هذه الحلول
الأنظمة الروبوتية التعاونية . الفرق بين
الروبوت التعاوني هو أنه قد لا يستخدم أجهزة أمان (خارجية) إضافية - فهي مدمجة بالفعل فيه. فرق مهم آخر بين أنظمة الروبوتات التعاونية والروبوتات التعاونية هو أنه عند العمل معًا ، يتم استبعاد الاتصال بشخص ما. ولكن يمكن للروبوت التعاوني أن يكون على اتصال بجسم الإنسان دون الإضرار به. يتم تحقيق ذلك عن طريق الحد من القوة والجهد.
الحد من القوة والقوةمعظم الناس ، الذين يمثلون الكوبوت ، يعني روبوتًا يستخدم هذا الشكل الخاص من التعاون. لذلك ، نعتبرها بمزيد من التفصيل.
يوجد في "مفاصل" الروبوت أجهزة استشعار عزم الدوران التي يمكن أن تحدد حقيقة الاصطدام مع شخص. إذا اكتشفت المستشعرات وجود فائض من القوى المسموح بها ، يتوقف الروبوت. تم تصميم هذه الروبوتات أيضًا لتفريق القوى على سطح واسع ، في حالة حدوث تأثير - وهذا هو السبب في أن تفاصيل أجسامهم غالبًا ما تكون مصنوعة بأشكال مستديرة. يتم تضمين وظيفة للحد من القوة والقوة ، كقاعدة عامة ، في البرنامج القياسي.
- يتم التحكم في قوة وقوة الروبوت بحيث لا يتسبب الاتصال العرضي بين الروبوت والمشغل في حدوث ضرر.
- يمكن للشخص والروبوت التحرك في وقت واحد.
- تدابير الحد من المخاطر المحتملة:
- عوامل تصميم الروبوت (على سبيل المثال ، الأشكال المستديرة والمواد القابلة للطرق) ؛
- اختيار مناسب للتطبيقات وتصميم خلية الروبوت (على سبيل المثال ، الاستيلاء ، قطعة العمل ، المسار ، إلخ).
يمكن أن يكون الاتصال في PFL من نوعين: عابر (عابر) وشبه ثابت (شبه ثابت) .
| جهة اتصال انتقالية
| شبه ساكنة
الاتصال
|
الوصف
| حدث الاتصال "قصير" (<50 مللي ثانية).
يمكن أن يرتد جزء من جسم الإنسان عادة.
| يمكن أن يكون الاتصال طويلاً.
يمكن التقاط جزء من جسم الإنسان.
|
معايير الحد (ما يجب إدارته)
| الجهد الدافع والضغط والجهد.
نقل الطاقة ، قوة محددة.
| قوى الذروة ، الضغط ، الجهد
|
إمكانية الوصول في التصميم / التحكم
| موقف الروبوت ، الحمولة.
السرعة (النسبية).
منطقة الاتصال ، المدة.
| القوة (ربط عزم الدوران ، الموقف).
منطقة الاتصال ، المدة.
|
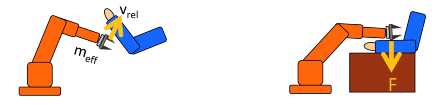 صورة: Bjoern Matthias - "الروبوتات التعاونية الحد من القوة والقوة"تدابير الحد من المخاطر
صورة: Bjoern Matthias - "الروبوتات التعاونية الحد من القوة والقوة"تدابير الحد من المخاطر | جهة اتصال انتقالية
| اتصال شبه ثابت
|
البناء
| إنقاص الوزن الفعال.
زيادة منطقة التلامس.
زيادة مدة الاتصال.
| زيادة منطقة التلامس.
|
الإدارة
| انخفاض في السرعة النسبية.
تقليل الكتلة الفعالة عن طريق اختيار الموقع المناسب.
| تقليل الحد الأقصى لعزم الدوران والقوة.
تقليل وقت الاتصال.
|
التكوين النهائي هو التوازن بين الأمن والأداء.تشتمل المواصفات الفنية ISO / TS 15066 على جدول تم تطويره من قبل جامعة ماينز حول دراسة عتبة الألم ، والذي يوفر قائمة بمستويات القوة والضغط لتصميم جهود الروبوت (تمت دراسة 100 عتبة ألم في 29 نقطة ألم).


 المصدر: ISO / TS 15066: 2016 ، الشكل. 4 ، الشكل أ -1
المصدر: ISO / TS 15066: 2016 ، الشكل. 4 ، الشكل أ -1 المصدر: ISO / TS 15066: 2016.المصدر: R. Nelson Shea، NRSC 2016 Presentation. تستخدم بإذنتذكر: السلامة هي عدم وجود إصابات.
المصدر: ISO / TS 15066: 2016.المصدر: R. Nelson Shea، NRSC 2016 Presentation. تستخدم بإذنتذكر: السلامة هي عدم وجود إصابات.الجزء 2. تاريخ روبوتات
تم تطوير أول كوبوت في عام 1996 من قبل
جيه.إدوارد كولجيت ومايكل بيشكين من جامعة نورث وسترن (الولايات المتحدة الأمريكية). وبالمقارنة ، تم تصنيع الروبوتات الصناعية التقليدية لأكثر من 30 عامًا في هذا الوقت. ومع ذلك ، فقد صاغ مصطلح "cobot" نتيجة مسابقة أفضل اسم من قبل شخص آخر من نفس الجامعة - Brent Gillespie. أحببت صحيفة وول ستريت جورنال المصطلح كثيرًا لدرجة أنهم وضعوه في قائمة
كلمات الغد وأعطوا جائزة قدرها 50 دولارًا
تم تقديم أول براءة اختراع كوبوت في الولايات المتحدة في فبراير 1996 (
الولايات المتحدة 5،923،129 ) ، وبراءة الاختراع باستخدام مصطلح كوبوت في أكتوبر 1997 (
الولايات المتحدة 5،952،796 ).
يمكن رؤية صور أول كوبوت هناتم دعم تطوير الروبوتات في جامعة نورث وسترن بدعم من صناديق الشركات جنرال موتورز وفورد ، وكذلك مؤسسة العلوم الوطنية الأمريكية. في نفس عام 1996 ، أسس العلماء شركة Cobotics (في عام 2002 تم استيعابها من قبل Stanley Assembly Technologies).
اكتسب الروبوتون شعبيتهم الحالية بفضل ظهور شركة Universal Robots (الدنمارك) في عام 2005. جاءت فكرة إنشاء روبوت سهل التشغيل ورخيص الثمن (مقارنة بروبوت صناعي) في عام 2003. بعد أن قدمت العديد من النماذج الأولية ، أصدرت الشركة في عام 2008 أول نموذج تسلسلي للروبوت UR5 (الأكثر شعبية حتى الآن) وتلقت استثمارات من الحكومة الدنماركية. في عام 2012 ، أصدرت الشركة روبوتًا ثانيًا (UR10) ، وفي عام 2015 استحوذت عليه شركة Teradyne الأمريكية مقابل 285 مليون دولار.
بعد نجاح الروبوتات العالمية ، بدأ عمل الروبوتات من قبل الشركات التي طالما احتلت بنجاح سوق الروبوتات الصناعية (FANUC ، ABB ، KUKA ، BOSCH وغيرها) ، وبدأت الشركات الناشئة في الظهور:
Rethink Robotics ، Doosan Robotics ، Techman Robot. من بين المشاريع الشابة هناك أيضًا مهاجرون من دول رابطة الدول المستقلة - الشركة البيلاروسية الناشئة Rozum Robotics.
الجزء 3. أين وكيف يتم استخدام روبوتات
كم عدد روبوتات في العالم؟ على الرغم من الشعبية المتزايدة للروبوتات ، لم يتم تصنيفها بعد في فصل منفصل في الدراسة السنوية لـ World Robotics ، التي تجري مصدر البيانات الرئيسي في الصناعة ، الاتحاد الدولي للروبوتات (IFR).
يتم حاليًا استخدام حوالي 2 مليون قطعة من الروبوتات الصناعية في العالم (توقعات IFR لعام 2017). كم منهم تعاونية غير معروفة بالضبط. هناك تقييم من قبل أبحاث باركليز ، حيث تم في عام 2017 تشغيل 32 ألف كوبوت ، تم إنتاج الغالبية العظمى منها بواسطة
Universal Robots .
قبل بضع سنوات ، تم اعتبار cobots معدات مخبرية حصرية ، والتي ليس لها مكان في الإنتاج ، ولكن إمكانية التكوين المرن والحد الأدنى من تكاليف التكامل سمحت لنا بالتغلب على الحاجز النفسي. الآن يتم استخدام الروبوتات من هذه الفئة في الصناعات الخفيفة والغذائية وحتى في صناعة السيارات التي تشغلها عادةً الروبوتات الكلاسيكية.
تقدر أبحاث باركليز السوق في عام 2017 بمبلغ 800 مليون دولار ، وهناك أدلة على أن ما يصل إلى ثلث الكوبوتات
تباع في الصين . قدر IFR سوق الروبوت الصناعي في عام 2017 بمبلغ 13.1 مليار دولار.
التوقعات للسنوات المقبلة:
يتوقع IFR حجم السوق الإجمالي للروبوتات الصناعية بحلول عام 2020 عند 23.2 مليار دولار. إذا قارنا تقديرات باركليز و IFR ، فسوف نحصل على زيادة ملحوظة في حصة الروبوتات في المجموع: من 6.1٪ في 2017 إلى 13.5٪ في 2020 - ديناميكيًا تمامًا.
ما يمكن أن يفعله روبوتات:- انتقاء & مكان: تحميل حزام ناقل التفريغ.
- تحميل / تفريغ قطع العمل في الآلات.
- اختبار وفرز الأجزاء: فحص أو فرز الأشياء العشوائية على الناقل كجزء من مراقبة الجودة أو الاحتياجات الأخرى.
- التعبئة والتغليف: جمع ووضع العناصر في حاويات للنقل أو التخزين.
- سهولة التجميع: تجميع الإلكترونيات والأجهزة المنزلية.
- عمليات التشطيب: إزالة البلاستيك أو المعدن الزائد من الأجزاء.
عوامل نمو كوبوت في السنوات القادمة:1. كوبوت أرخص من الروبوتات الصناعية العادية (~ 25 ألف دولار بدلاً من ~ 50 دولار) -> تم تخفيض عتبة الدخول للشركات الصغيرة والمتوسطة الحجم.
2. Cobots أسهل في الإعداد: ليس من الضروري أن تكون قادرًا على البرمجة. بعد يوم واحد من التدريب ، سيكون العامل قادرًا على تكوين الروبوت للقيام بمهام متوسطة التعقيد.
يمكنك تجربتها بنفسك . وهذا يعني أنه لا توجد حاجة لتوظيف مهندسي الخدمة أو تكامل النظام -> ينخفض حد دخول الشركات الصغيرة والمتوسطة مرة أخرى.
3. كوبوتوف أسهل في النقل: فهي أسهل من الصناعية ، ولا تحتاج إلى بنية تحتية محلية على شكل قفص -> تزداد جاذبية الشركات الصغيرة والمتوسطة ، حيث يمكن إعادة ضبط الإنتاج بسرعة.
4.
الزيادة في تكلفة العمل اليدوي بسبب شيخوخة السكان
وانخفاض عدد الأشخاص القادرين على العمل (معدل العامل للساعة: 40 يورو في ألمانيا ، 12 يورو في الولايات المتحدة الأمريكية ، 11 يورو في أوروبا الشرقية و 9 يورو في الصين. تكلفة كوبوت 6 دولارات / ساعة) .
5. تؤدي إعادة تآزر العوامل السابقة إلى حقيقة أن الولايات المتحدة والاتحاد الأوروبي يعيدان الإنتاج من الصين إلى وطنهما. يمكن أن يساعد ذلك في تقليل تكاليف الشحن وتحسين جودة المنتج.
6. برامج الدولة التي تهدف إلى أتمتة الإنتاج والروبوتية. يمكنهم تحفيز ودعم (بما في ذلك ماديًا) الحصول على الروبوتات واستخدامها:
- "الصناعة 4.0" في ألمانيا ؛
- "صنع في الصين 2025" في الصين ؛
- "مبادرة الروبوتات الوطنية 2.0" في الولايات المتحدة الأمريكية.
الجزء 4. الذي ينتج الكوبوتات
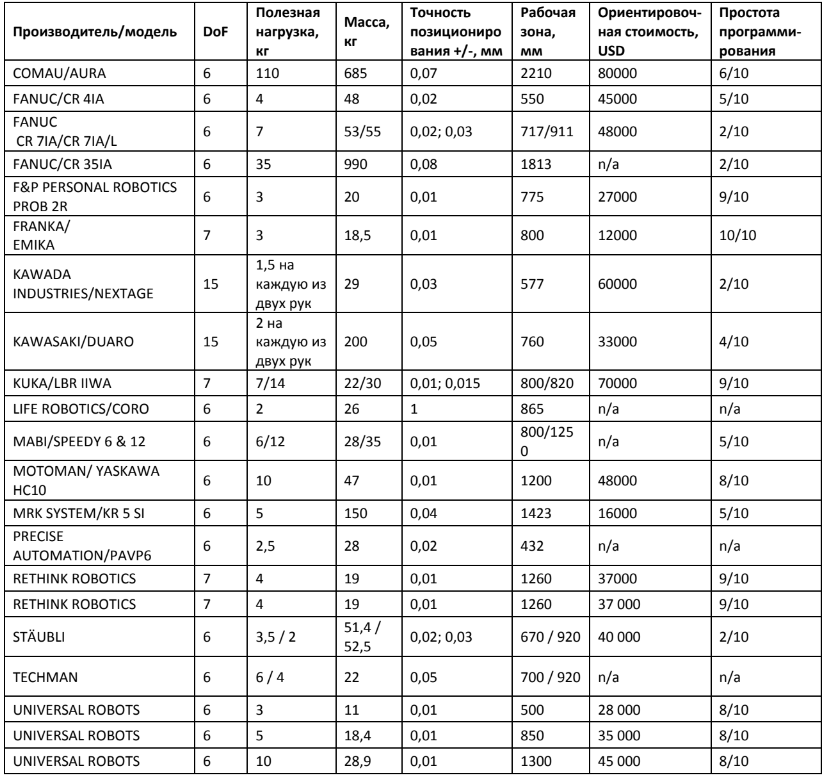 تنزيل الجدول
تنزيل الجدولالجزء 5. كيف يمكنك أن تكسب على الروبوتات وكيفية استخدامها لحل مشاكلك
كيفية كسب المال على cobots:
- الانخراط في التكامل الصناعي - مساعدة الشركات على اختيار وتخصيص كوبوت. الآن في روسيا هي أعمال تنافسية إلى حد ما وذات هامش منخفض. ومع ذلك ، هناك إمكانية للنمو.
- الانخراط في الخدمة: الإصلاح والصيانة). عادة ما يأتي كخيار إضافي للاندماج ، ولكن يمكن أن يوجد بشكل منفصل.
- لتطوير حلول متخصصة تعتمد على الكوبوت ، على سبيل المثال ، لعمل حلول جاهزة تعتمد على الكوبوتات. أو قم بتحميل الكود إلى متجر التطبيقات واستلام الأموال.
- طور روبوتك وأرسل طلبًا إلى مسرع الشركات في Sberbank بحلول 15 يوليو 2018.
لاستخدام cobots في حل مشاكلهم ، من الضروري تحديد العمليات (المهام) المحتملة للأتمتة. مثالية للأتمتة الأولى ستكون المهام المتكررة بدرجة عالية من اليقين (يمكن التنبؤ به).
| فقط
لأتمتة
| صعب
لأتمتة
|
المهام
| تحريك الأشياء ، باتباع المسار بدون جهد
أو بجهد مستمر
| التحكم في القوة ، مثل التلميع أو التجميع الدقيق
|
العناصر
| مجموعة متنوعة من العناصر (الأحجام والكتلة
مادة) ، الأشكال المعروفة والعادية (اسطوانة ، مربع)
| مجموعة متنوعة من العناصر والأشكال المعقدة ،
أشياء مشوهة وهشة
|
ترتيب الموضوعات
| العناصر مكدسة بالتساوي: في صندوق ، مكدس أو على منصة نقالة
| يتم التخلص من العناصر في صندوق / سلة أو الانتقال
ناقل سريع
|
التكامل مع المعدات الأخرى
| استخدام الواجهات التي يستخدمها الشخص:
الأزرار والأقلام
| اتصال وتكوين أجهزة الاستشعار ، وتكامل البرامج
بأدوات الآلة
|
برمجة
| الحركات المتكررة في تسلسل واحد (بدون
الظروف والأشجار)
| المنطق المعقد والعديد من الشروط حسب
المعلومات من أجهزة الاستشعار
|
هنا يمكنك حساب عائد الاستثمار لمشروع الروبوتات الخاص بك.استخدمت المقالة ترجمة المنشورات التالية:
- كارول فرانكلين - "نظرة عامة ISO / TS 15066: 2016"
- روبرتا نيلسون شيا - "ISO / TS 15066 مقدمة"
- بجورن ماتياس - "الروبوتات التعاونية الحد من القوة والقوة"
- blog.robotiq.com/what-does-collaborative-robot-mean
- Robotiq - "Cobot eBook" ، "الشروع في العمل مع الروبوتات التعاونية" ، "شرح ISO / TS 15066"
أعد النص ألبرت إيفيموف ودينيس زاتياغوف من مختبر سبيربنك للروبوتات