هذا الفيديو هو المكان الذي يتحدث فيه Marc Raibert ، مؤسس Boston Dynamics ، عن الروبوتات: BigDog و Spot و SpotMini و Atlas. استنادًا إلى هذا الفيديو ومقاطع الفيديو الأخرى التي أجرى فيها مارك ، سأصف بإيجاز تقنيات الروبوت والخطط المستقبلية للشركة.
أسس مارك رايبرت Boston Dynamics قبل 25 عامًا ، لكنها لم تدخل الروبوتات بعد في الإنتاج. يشرح المؤسس ذلك بحقيقة أن الشركة كانت تعمل طوال هذا الوقت من أجل تطوير أسرع يتجاوز أفق قدرات الروبوتات الحالية. ومع ذلك ، في الروبوتات ، وصلت الشركة إلى المستوى عندما أصبح من الممكن صنع روبوت كهربائي صغير بأربعة أرجل قادرة على التحرك بشكل مستقل حول التضاريس والمباني الوعرة. لذلك ، سيبدأون الإنتاج الضخم لروبوت SpotMini في منتصف عام 2019 بمبلغ 1000 قطعة سنويًا.
حاليا ، يتم اختبار 10 روبوتات من قبل العملاء المحتملين ، وسيتم تسليم 100 آخر في غضون عام للاختبار.
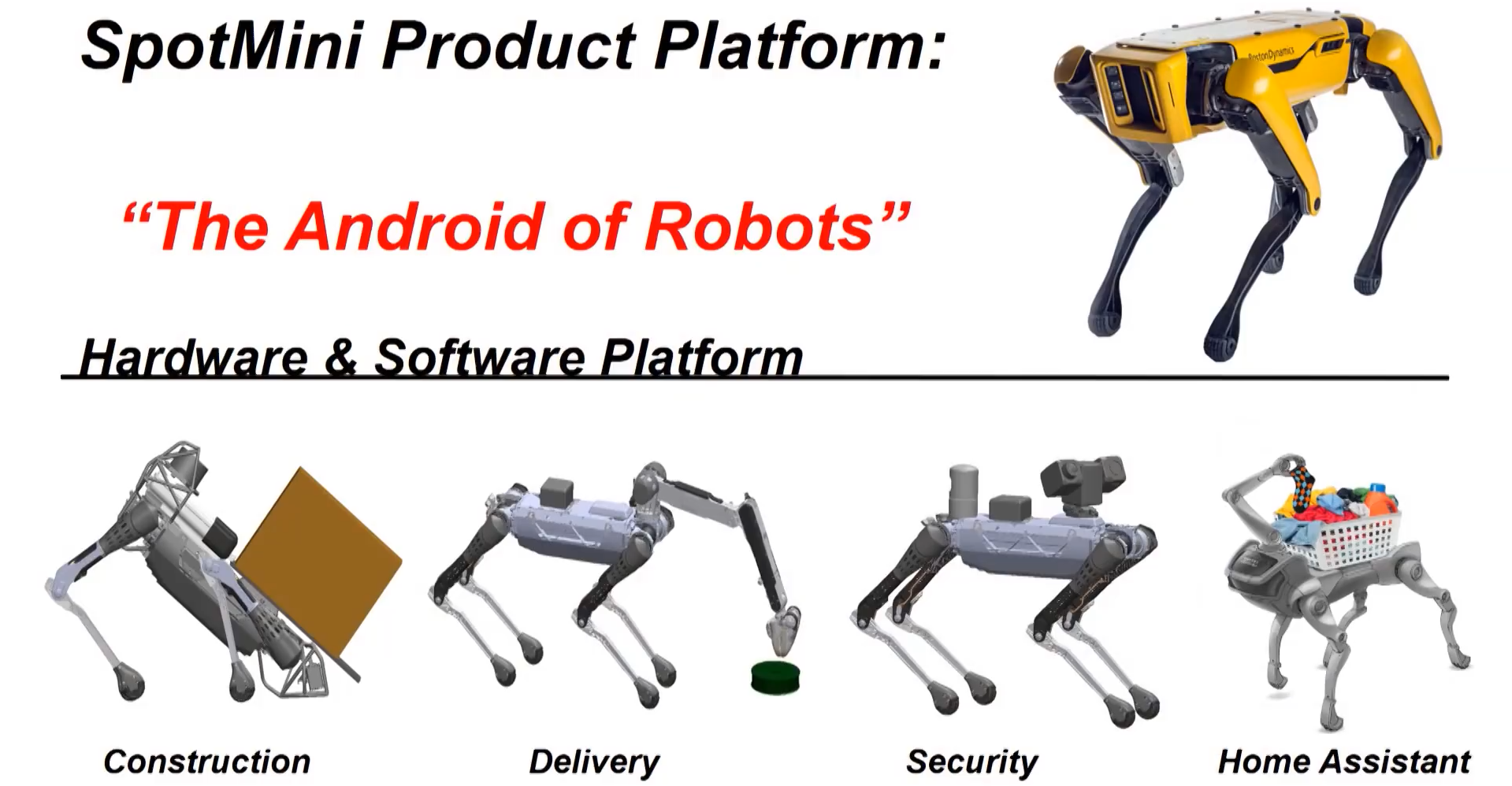
سيتم بيع الروبوت كمنصة يمكنك تثبيت يدك عليها. يحتوي على واجهة برمجة تطبيقات يمكن لمطوري الجهات الخارجية من خلالها كتابة تطبيقاتهم واستخدام الوظائف الأساسية للروبوت. هناك العديد من العروض التوضيحية لمثل هذه التطبيقات في الفيديو.
من المفهوم أن Boston Dinamics قد وضعت الوظائف الأساسية في الروبوت ، ويمكن فقط إعطاء أوامر عالية المستوى مثل الذهاب إلى هناك بهذه السرعة لمشغل الروبوت أو مطور تابع لجهة خارجية ، يمكن تقديم علبة كوكاكولا.
يدعي مارك أن الروبوت يمكن أن يتصرف بجوار شخص وهو متعاون بشكل أساسي ، وهو ما يبرره في الفيديو بحيث يزن الروبوت 27 كيلوغرامًا فقط وبالتالي لا يمكن أن يسبب الأذى للبشر.

يمكن لـ SpotMini اكتشاف علبة كوكاكولا ، والتقاطها ونقلها إلى مكان آخر ، أو إعطاؤها للناس. الصورة أعلاه هي مجرد مثال على تطبيق لروبوت يقوم بهذه المهمة.
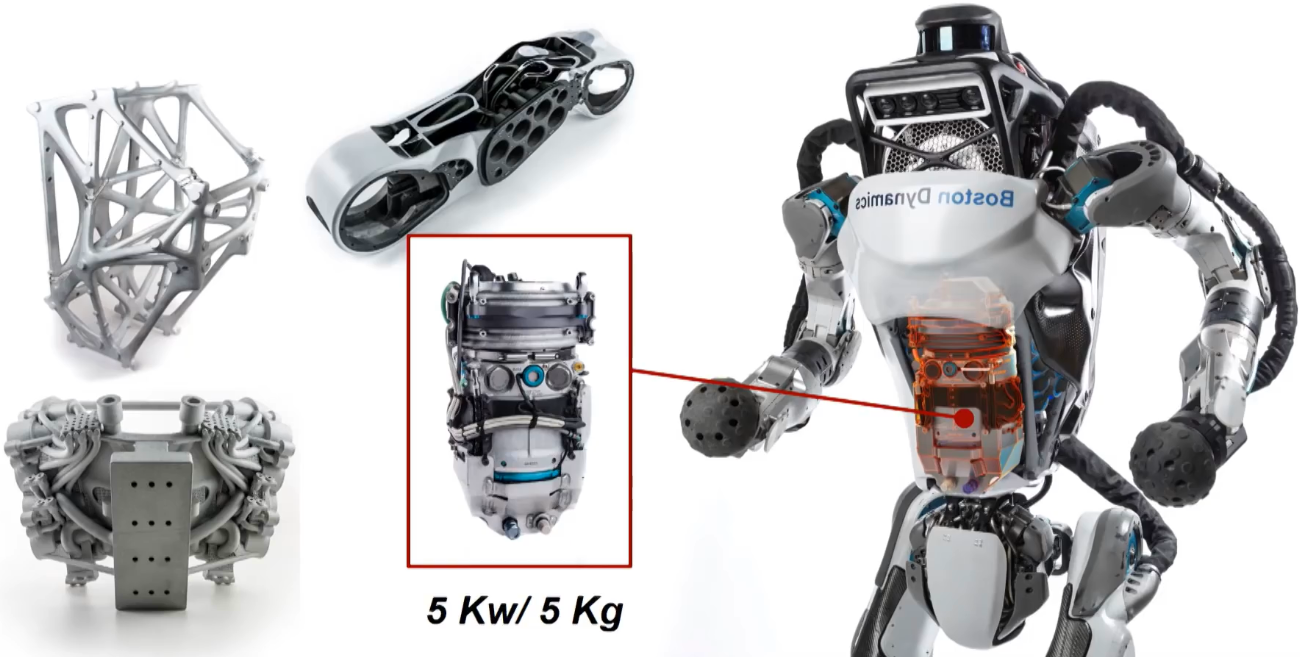
من المثير للاهتمام أيضًا القصة حول التقنيات المستخدمة في روبوت أطلس. تم تخفيض الوزن الأولي للروبوت من 170 كجم إلى 75 بنفس نسبة الطاقة. في الوقت نفسه ، أصبح الروبوت أكثر مرونة وقدرة. وقد تحقق ذلك بفضل أساليب التصميم الجديدة والطباعة ثلاثية الأبعاد. يُظهر الفيديو ساق روبوت مطبوع على طابعة ، ويقل وزنه عدة مرات بنفس القوة.
تجدر الإشارة بشكل خاص إلى محطة الطاقة. في الفيديو ، يقول مارك أنهم تمكنوا من ملاءمته: محرك ، مضخة ، مرشح ، مشعب وسترة حرارية مع بطارية في معدة الروبوت ، في حين كان وزن هذا الهيكل بأكمله 5 كيلوغرامات بطاقة 5 كيلووات. مرة أخرى ، يقول إن هذا لم يكن ممكنًا لولا تقنيات التصميم المتقدمة والطباعة ثلاثية الأبعاد.


في مقطع فيديو آخر ، يتحدث عن روبوت المقبض ، تم التخطيط له على أنه روبوت لوجستي يمكنه حمل الأحمال بسرعة على مسافات طويلة ، لأنه بدلاً من الساقين لديه عجلات.
هندسة عكسية صغيرة مني:في الفيديو ، يقول مارك رايبيرت أن الروبوت يستخدم 5 وحدات كاميرا ، اثنتان في الأمام وواحدة على اليسار واليمين والظهر. يبدو أنهم رفضوا ليدار الليزر في النسخة التجارية. تظهر الصورة أن وحدة الكاميرا غير قياسية إلى حد ما ، في المجمل يمكنك رؤية 5 كاميرات في الوحدة ، ربما العديد منها عبارة عن كاميرا بالأشعة تحت الحمراء مع جهاز استقبال. من الواضح أيضًا أن الكاميرتين صغيرتان وتبدو بزاوية لبعضهما البعض. إذا كان شخص يعرف ما هي هذه الوحدة ، اكتب في التعليقات. من كل هذا يمكننا أن نستنتج أن الروبوت لا يمكنه القيام إلا بكاميرات ستيريو ، ربما مع كاميرا عمق الأشعة تحت الحمراء. من المرجح أن خوارزمية تحديد المواقع والتوطين هي SLAM بصري ، وهو غير واضح. بشكل عام ، شركة بوسطن ديناميكس مغلقة نوعًا ما ولا تتحدث كثيرًا عن برنامج الروبوتات الخاصة بها ، ولكن في المنتديات ، يعمل الأشخاص الذين يعملون فيها على أن لديهم كود الملكية الخاص بهم ، بشكل رئيسي في C ++ وقليلًا في Python. هناك ذكر لاستخدام دريك. ربما في روبوت أطلس ، تم استخدام ROS جزئيًا في المسابقات.
في الميكانيكا وحساب حركة أطراف الروبوتات ، استمر بحث مارك رايبرت منذ تأسيس مختبر حركة القدم في عام 1980 وكتابة كتاب Legged Robots الذي يوازن في عام 1986. أيضًا ، من دراسات معهد ماساتشوستس للتكنولوجيا (MIT) التي وصفتها في مقال سابق عن روبوت الفهد الأعمى ، يمكننا أن نستنتج أنه يتم أيضًا استخدام طرق مماثلة في SpotMini منذ أن كان مارك رايبرت أستاذًا في MIT.
في الواقع ، سيكون أول روبوت معقد وظيفي بما فيه الكفاية سيتم استخدامه يوميًا بجوار الشخص. في حين أنه لا يستطيع سوى الحصول على علبة من الكولا وأكياس نسائية ، فهل سيظل هناك :)