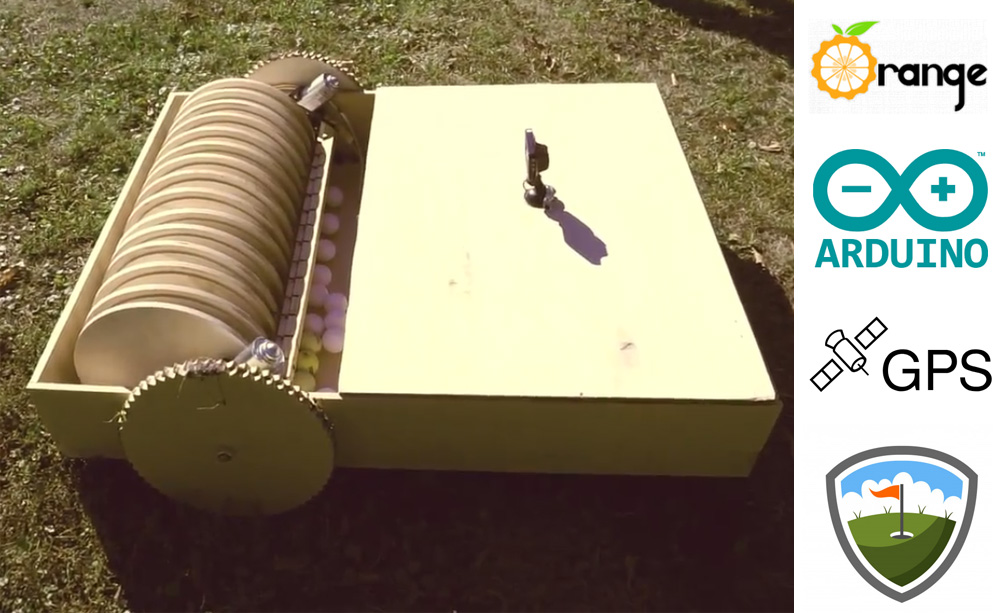
عملية تطوير روبوت الخدمة على Orangepi zero و arduino لجمع كرات الجولف. كل ألم مطور مستقل ، غير مثقل بخلفية تقنية في منشور واحد ...
تطوير أفضل لاعب. اختبار الفيديو.
ما هو الجولف؟
الجولف هي لعبة رياضية. الهدف الرئيسي هو تحريك الكرة في الحفرة في كل حقل لعدد أقل من الضربات ، لتمرير جميع الحقول لعدد أقل من الضربات. في بلادنا ، الجولف ضعيف للغاية ومحزن. اللعبة مثيرة للاهتمام للغاية ، فهي تسمح للناس بقضاء الوقت في الهواء الطلق ، والتواصل أثناء اللعبة ، ومناسبة لجميع الأعمار. تحتوي اللعبة على قياس واضح لنجاح إعاقتك - وهو مؤشر رقمي لمؤهلات الرياضي. كل هذه العوامل تجعل الجولف نشاطًا متدفقًا. إذا لم تجرب الجولف - حان الوقت!

ما هو نطاق القيادة؟
للضرب من المرة الأولى إلى نهاية الحقل ، أقرب إلى الحفرة ، يجب أن تكون قادرًا على تنفيذ ضربات طويلة ودقيقة. تعد منطقة القيادة مجال تدريب لممارسة طلقات الجولف الطويلة والمتوسطة. تبدو هذه الحقول شيء من هذا القبيل.

أنا على مسافة القيادة. هذا توضيح لكيفية الضرب بشكل غير صحيح.

في جلسة تدريبية واحدة على مثل هذا المجال يقومون عادة بأكثر من مائة زيارة. كانت الأيدي لجمع هذه الكرات شاقة ومهددة للحياة. في بداية القرن العشرين ، لم يكن هناك الكثير من الخيارات ، ولكن في بعض الأماكن أصبح العمل اليدوي أرخص الآن.

لا تزال أداة يدوية قيد الاستخدام ، ولكن هذا هو الاستثناء.
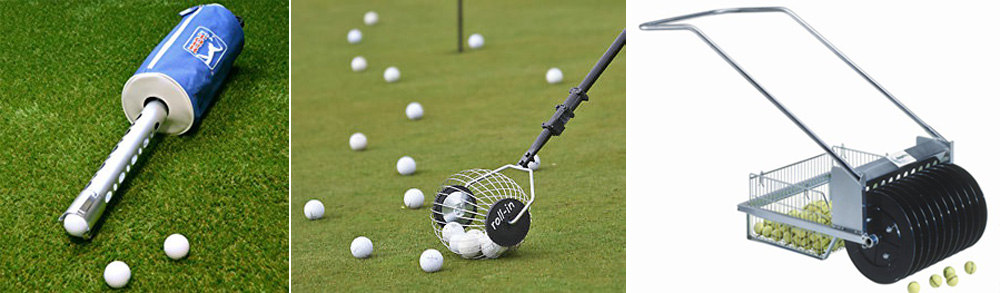
في معظم الأحيان ، يتم جمع الكرات باستخدام عقبة خاصة على جرار أو عربة جولف أو سيارة عادية.

لجمع الكرات ، اسحبها إلى الغسالة ، وعادة ما يكون التحميل في الموزع شخصًا مميزًا في الدولة ، على الرغم من أن الجراس يمكن أن يلعب هذا الدور أيضًا. (Graskipper هو الشخص المسؤول عن جودة العشب في ملاعب الغولف).
يبدو أن تطوير وتنفيذ روبوت خدمة لجمع كرات الجولف خطوة معقولة من وجهة نظر اقتصادية ، لأنه يوفر صيانة المعدات الخاصة ورواتب الموظف الذي كان من المفترض أن يقوم بهذه العملية. تم تطوير لعبة الجولف في جميع أنحاء العالم ، وتظهر هذه الصورة بوضوح هذا.
كانت هذه اللعبة منتشرة بشكل خاص في الولايات المتحدة الأمريكية وأوروبا ، حيث مستوى الراتب مرتفع جدًا والقدرة على استبدال الموظف بروبوت خدمة تؤتي ثمارها بسرعة كبيرة.
إيجاد حل
نتيجة البحث تم العثور على:
بضعة مشاريع DIY

زوجين من الاداءات الجميلة
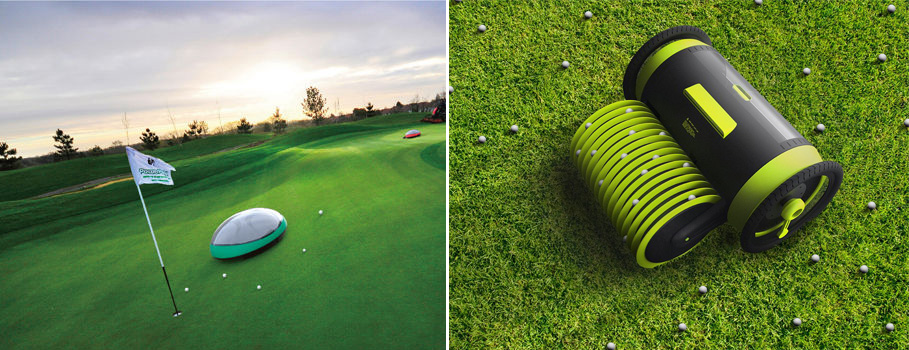
وواحد مشروع تجاري

من هذا يمكننا أن نستنتج أن هناك اهتمام. على الأرجح ، من الخطر للغاية الاستثمار في مثل هذه الحلول المتخصصة. تكلفة تطوير وتعديل الإنتاج مرتفعة ، وستأتي بعض القوالب بعشرات الآلاف من الدولارات. هناك ما يزيد قليلاً عن 40 ناديًا للغولف في روسيا ، في حين أن هناك الكثير في العالم ، في ألمانيا وحدها هناك أكثر من 700 نادي ، وإجمالي أكثر من 34000. إن روبوت منتقي الكرة كمنتج لن يجتاز اختبار فرشاة الأسنان في Good Corporation.
من الغريب أن إدارة العديد من نوادي الجولف الأوروبية التي تحدثت معها لم تسمع عن وجود روبوت جاهز ، على الرغم من أنها أبدت اهتمامًا. كل محاولاتي للتواصل مع هذه الشركة باءت بالفشل ، ربما لا يمكنهم التعامل مع عدد الطلبات الحالية.
أنا لا أعرف بالضبط ما سيأتي منه. ربما في مكان ما على الطريق من صندوق الخشب الرقائقي إلى العينة الأولى "للبالغين" ، سيأتي فهم ما إذا كان شخص ما يحتاج إليها أم لا.
الهدف الأولي هو الحصول على عينة عاملة دون الانتباه إلى المظهر. بعد ذلك ، أخطط لإعطاء الروبوت مظهرًا أنيقًا ووضعه للاختبار في نادي جولف في روسيا. بعد تصحيح الأخطاء وإجراء اختبارات طويلة المدى ، تابع معالجة النموذج في نموذج مناسب للإنتاج.
دعنا نذهب!
يتم التخطيط للعديد من الفوائد الرئيسية بالنسبة للحل التجاري الحالي.
- لا حاجة لدفن كبل منخفض التيار حول المحيط.
- إمكانية التنفيذ في البنية التحتية القائمة.
- تكلفة أقل وإجمالي تكلفة الملكية.
حالة وجزء ميكانيكي
تم اختيار مادة جسم العينة الأولى من الخشب الرقائقي. رخيصة ، تتيح لك تقليم بعض الأجزاء بسرعة على الفور أو حفر ثقوب. حتى يتم تعديل كل شيء بوضوح ، قمت برسم رسم وأعطيته لقطع الطحن.

جمعت كل التفاصيل. منذ البداية ، كانت هناك فكرة لجعل الجسم مستديرًا ، لكنها قررت التوقف بدقة عن MVP. يتم استبعاد أي شيء لا يؤثر على الأداء عن قصد من قائمة المهام.

أظهرت آلية التقاط الكرات أثناء تطور هذه الأجهزة فعاليتها ، وبالتالي ، لم يتم النظر في خيارات أخرى.
المحرك 12 فولت 30 نيوتن / م. على كل عجلة. يقوم نفس المحرك بتدوير العمود مع أقراص الإمساك ، حيث يتم رفعها فوق السطح للاستثمار في المنعطفات وزيادة القدرة على المناورة.

في البداية ، كانت المحركات بدون اسم صيني. لم يكن هناك لحظة في الوصف ، لذا كان الخطر كبيرًا. من الواضح أن اللحظة لم تكن كافية ، والتي لا يمكن قولها عن المحركات من النوافذ.
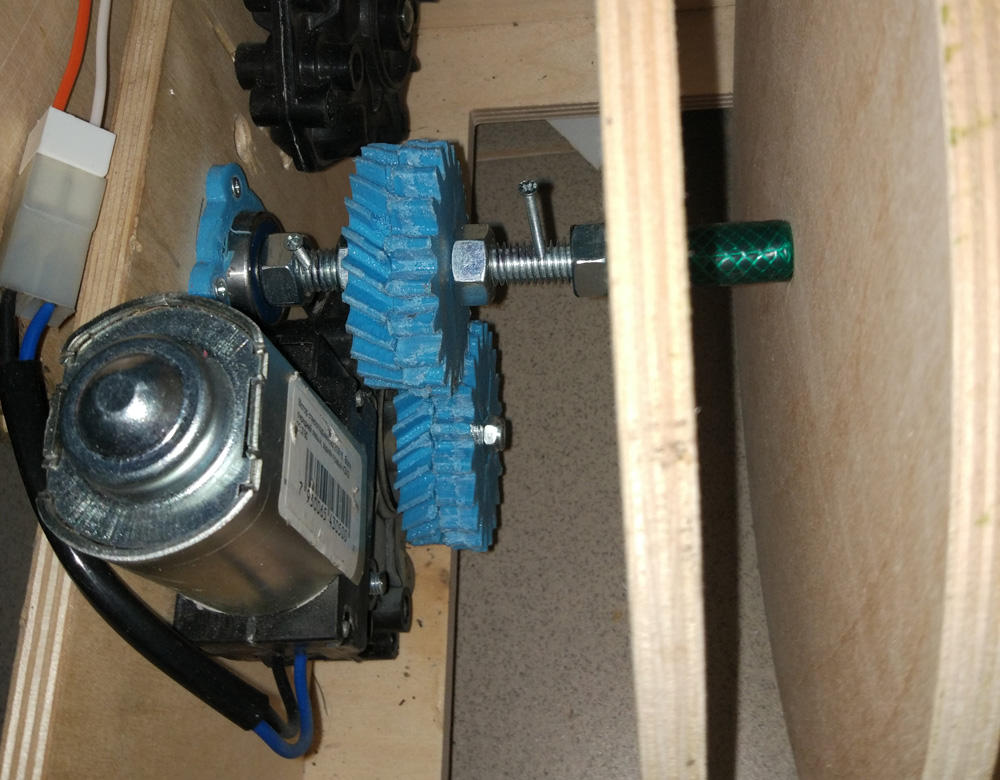
بعد تغيير المحركات ، كان يجب طباعة التروس الأخرى.
إلكترونيات
نظرًا لأن المسبار المتجول يجب أن يعمل بدون كبل كهرومغناطيسي على طول محيط المجال ، فإنه يحتاج بطريقة ما إلى التنقل والبحث عن قاعدة لإسقاط الكرات وإعادة الشحن.
قررت استخدام Orangepi lite و arduino لعمل أكثر ملاءمة مع 5v بدون محولات مستوى حديقة الحيوان لكل مستشعر ومحرك المحرك.
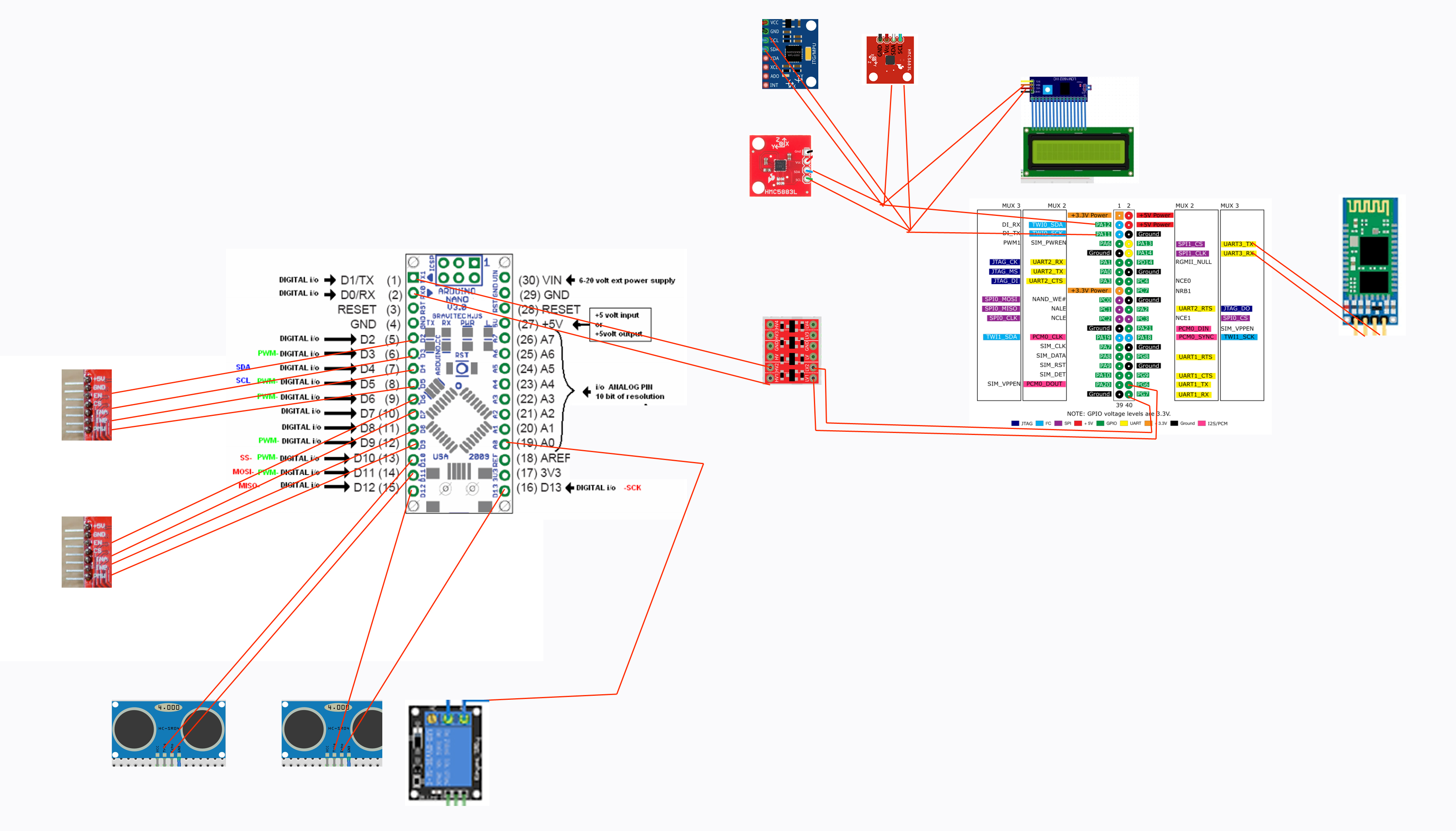
جمعت كل الوحدات النهائية على لوحة اللوح. إنه يؤثر على نقص الخبرة في الدوائر الكهربائية ، وأعتقد أنه في المستقبل لن يكون هناك مشكلة في فصل اللوحة عن الوحدات أو العناصر المنفصلة وترتيبها.

يتكون المخطط من 11 خطة ، 11 كارل!
- أورانج بي لايت
- اردوينو نانو
- وحدة GPS GY-NEO6MV2
- محركان محرك VNH2SP30
- بلويتوث HC-06
- عدد 2 وحدة فوق صوتية J34
- محول مستوى المنطق
- وحدة جيروسكوب 3 محاور ومقياس تسارع GY-521 MPU-6050
- كتلة مرحلتين
بالطبع ، تم ذلك لتجميع وتركيب واستبدال الوحدات بسرعة.
جزء البرنامج
النص الرئيسي مكتوب بلغة Python. هناك هدف عالمي في دورة البرنامج:
- التهيئة
- جمع الكرات
- ارجع إلى القاعدة
- جارٍ الشحن
- العطل المجدولة
- استرح على أحوال الطقس.
التهيئة
أثناء التهيئة ، يتم اختبار الأنظمة ، ويتم البحث عن نظام تحديد المواقع العالمي (GPS) ، ويتم إنشاء خريطة محلية عبر البلاد ، ويتم تحديد هدف آخر.
جمع الكرات
أثناء جمع الكرات في كل دورة ، تحديث خريطة التضاريس المحلية ، وبناء ناقل للهدف الجغرافي الحالي ، واستطلاع مستشعر الاكتظاظ بالكرات ، واستقصاء البطارية.
ارجع إلى القاعدة
في حالة تجاوز سعة المقصورة للسيوف أو استنفاد البطارية ، يقوم الروبوت بتحويل الهدف العالمي للعودة إلى القاعدة بأقصر طريق. مع القرب الشديد من إحداثيات القاعدة ، يتم إجراء بحث مرئي للعلامة يتم من خلاله توجيه أكثر دقة.
الشحن والراحة
يتم الشحن حتى جهد البطارية المطلوب. يمكن جدولة الراحة في الموعد المحدد أو عن طريق تشغيل جهاز استشعار المطر.
الإسكان

شكرا جزيلا لتصميم
habr.com/users/NikitaKhvorykيجب تغطية الجسم الداعم من الأعلى بالجزء العلوي ، والذي يعمل على الحماية من المطر وسقوط الكرات. أول حالة زخرفية أخطط لصنعها من الألياف الزجاجية والإيبوكسي. أنا مستعد لكتابة منشور منفصل حول هذا الموضوع ، إذا كان مثيرًا للاهتمام.

فيديو
الخطط
بالفعل ، يجمع المسبار 95-100 ٪ من الأهداف في طريقه. ينشئ مسارًا داخل المضلع باستخدام إحداثيات GPS. الخطط:
- إيجاد قاعدة لإسقاط الكرات والشحن على علامة بصرية.
- إعادة تعيين الكرة المؤازرة.
- جهاز استشعار تجاوز البالون.
- واجهة WEB للإشارة المرئية للنقاط على الخريطة ، وبناء مناطق لجمع الكرات بفواصل زمنية مختلفة.
- الجسم.
- وضع الروبوت في نادي للجولف في موسكو للاختبار في ظروف القتال.
الأسئلة
تلقيت عدة مرات بعد المنشور من إجابات مجتمع habro على الأسئلة أو النصائح التي ساعدت كثيرًا. خلال المنشور ، هناك العديد من الأسئلة التي أحتاج حقًا للإجابة عليها. قررت الجمع بينهما من أجل الراحة.
- كيفية صنع جسم للروبوت؟ يجب أن تبدو جميلة ، بدون استثمار في القوالب.
- هل يستحق الأمر الابتعاد عن الوحدات والقيام بكل شيء على لوحة واحدة؟ ماذا تفعل مع الكمبيوتر المصغر؟
- كيف تجد التمويل لمشروع؟ أين لاختبار العينات؟
- لا يمكنني العثور على مثال لمرشح كالمان لبيانات نظام تحديد المواقع العالمي (GPS) مع التصحيح بواسطة مقياس المغناطيسية ، الجيروسكوب. هناك Pycalman ، لكنني لا أفهم كيفية احتواء البيانات من أجهزة الاستشعار في المصفوفة. حتى على محمصة الخبز لم تجد الجواب. سأكون ممتنا للغاية.
شكرا لكم على اهتمامكم. في الوظيفة التالية ، اختبار في ظروف القتال. سأريكم ما لم يظهر ، سأحاول حل ما لم يتم حله ، واكتشف كل المجهول!
دائما لك ، شركة ناشئة مبتدئة ،
مدير الرابط الأوسط ، مطور جميع أنواع الروبوتات
1 ،
2 ،
3 ،
4 ،
5 ،
6 والأداة
1 ،
2 ،
3 . وكتبت قصتين
1 ،
2 وأجريت مقابلتين
1 ،
2 ،
3 .
أنا منفتح على الحوار والمشورة والمساعدة والاقتراحات.