
نكتة مهووسة: إذا كنت ترغب في البقاء على قيد الحياة في نهاية العالم ، عن طريق الروبوتات ، فقط أغلق الباب. لقد نجحت الروبوتات في الكثير من الأشياء - الدقة والسرعة والاتساق - ولكن لا تزال غير قادرة على التعامل مع مقابض الأبواب وأشياء بسيطة أخرى. جزء من المشكلة هو أنهم يجب أن يتحركوا في جميع أنحاء العالم لخلق الناس والأيدي البشرية. واليد هي واحدة من أكثر الهياكل الميكانيكية تعقيدًا للطبيعة.
ومع ذلك ، قريبا ، سوف تكون السيارات قادرة على القيام بذلك. طور باحثون من جامعة بيزا والمعهد الإيطالي للتكنولوجيا ذراع آلي بسيط بشكل مدهش ومثير للدهشة ، يعرف باسم SoftHand 2 ، يعمل على محركين فقط. قارن مع Shadow Dexterous Hand ، البراعة المنومة ، ولكنها مدعومة بـ 20 محركًا. تعد SoftHand الروبوتات بأن كل شيء سيتم الاستيلاء عليها قريبًا ، علاوة على ذلك ، أرخص بكثير.
مثل الأذرع الروبوتية الأخرى ، يستخدم SoftHand الأوتار على شكل كبلات تشد الأصابع. لكنهم موجودون بطريقة مختلفة تمامًا. بدلاً من مجموعة من الكابلات الممتدة على كل إصبع ، هناك واحدة فقط في اليد ، تتلوى على طول مجموعة الكتل الموجودة في كل إصبع. لديها رشاقة أقل ، لكنها تقلل إلى حد كبير من التكلفة واستهلاك الطاقة. وهذا أمر طبيعي - لا توجد تقنية عالمية واحدة مناسبة لجميع المتلاعبين الآليين. في حالات معينة ، سيجد عمالقة أكثر تعقيدًا التطبيق - كما سوف يجدها SoftHand.
لإنشاء اليد ، أنشأ الباحثون أولاً نسخة أبسط من SoftHand بمحرك واحد فقط. تقول Robotenik Cosimo Della Santina ، التي ساعدت في تصميم النظام: "الفكرة هي أنه عندما تقوم بتشغيل المحرك ، يتم تقليل طول الكابل ، مما يجعله يضغط على القبضة".
حرر الوتر ، وسوف تستقيم الأصابع مرة أخرى في راحة اليد المفتوحة ، بسبب مرونة المفاصل. يعمل هذا بشكل رائع عندما تحتاج ، على سبيل المثال ، إلى الإمساك بالكرة. ولكن بما أن الأصابع تتحرك بشكل متزامن ، فلا يمكن الوصول إلى المزيد من التلاعبات الدقيقة في اليد.
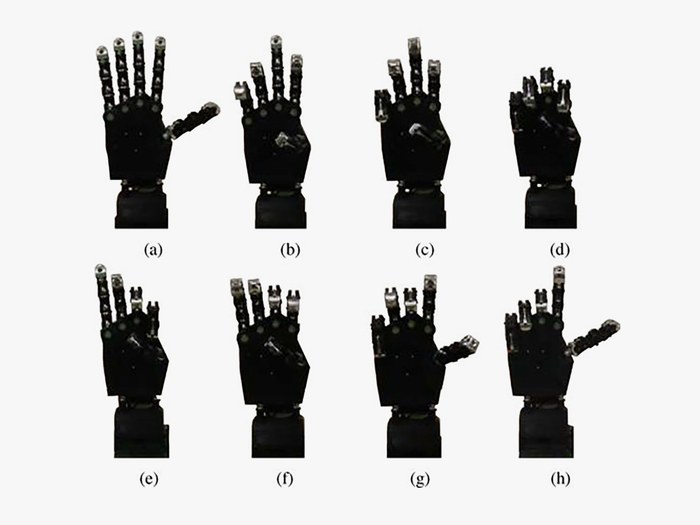
تؤدي إضافة محرك آخر إلى زيادة براعة SoftHand 2. بشكل ملحوظ. انظر إلى الصورة أعلاه. كل طرف من طرفي الكابل ، الذي لا يزال متعرجًا من خلال كل الأصابع ، مرتبط بأحد محركين يقعان في المعصم. إذا قمت بتشغيل المحركات في اتجاه واحد ، فسيتم تقصير الكبل وستحصل على إيماءات من الصف العلوي ، أ ، ب ، ج ، د - بنفس المبدأ كما هو الحال مع SoftHand.
ولكن إذا قمت بتشغيل المحركات في اتجاهات مختلفة ، فستحصل على شيء أكثر تعقيدًا - E و F و G و H. في هذه الحالة ، يقوم أحد المحركات بتحرير الكابل ، والآخر يختار. تقول Della Santina: "عندما يتحرك الكابل في العديد من الكتل ، فإن شد الكابل لا يبقى ثابتًا".
إذا قام الكابل بسحب محرك واحد ، فسيكون التوتر في النهاية الأقرب إليه أكبر. إذا قام المحرك الآخر بتحرير الكابل ، فسيكون التوتر في نهايته أقل. اللعب بالتوتر بهذه الطريقة ، يمكنك العمل مع SoftHand مع عدد أقل بكثير من الكابلات مما يستخدم عادة في أذرع الروبوت ، ولا تزال تجعل أصابعك تتحرك.
انظر إلى الرسوم المتحركة أعلاه وسترى الفرق الذي يصنعه المحرك الثاني. على اليسار هو المحرك الوحيد ، على اليمين - هناك بالفعل محركان. يعمل الأول على أكمل وجه ، مع الضغط على جميع الأصابع حول الكرة. يمكن أن تعمل الثانية بأصابعك بشكل انتقائي ، بسبب الاختلاف في شد الكابل. ينطبق نفس المبدأ مع القبض على الأوراق النقدية.
نظرًا لوجود محركين فقط ، يمكن لـ SoftHand استخدام مجموعة رائعة من المناورات. يمكنها أن تمد إصبع السبابة لتتأرجح الصمام ، أو تنزلق الورقة من الطاولة. يمكنها حتى فك الغطاء من العلبة. وكل هذا غير مكلف نسبيًا. بعد كل شيء ، كلما زادت المحركات ، كلما كانت أغلى.
قال مهندس الروبوتات Lerrel Pinto من جامعة كارنيجي ميلون ، الذي يصمم الأسلحة الآلية: "لكي تتعلم الروبوتات وتقوم بكل أنواع الأشياء الرائعة ، نحتاج إلى أنظمة غير مكلفة وموثوقة ومتطورة". ويضيف: "أعتقد أن يدهم تقدم حلاً وسطًا كبيرًا" ، ولكن الاختبار الحقيقي سيكون في العثور على الاستخدام الحقيقي لمثل هذه اليد. "هل يمكن استخدامه للتعلم في وضع عدم الاتصال؟ ما مدى مصداقيتها ، هل يمكنها تحمل آلاف الأسر؟ لا توجد إجابات لهذه الأسئلة ".
يعد SoftHand مشروعًا واعدًا ، ولكن لا يزال لدى المتلاعبين الآليين الأكثر تعقيدًا ، مثل Shadow Dexterous Hand ، ما يقدمونه. يمكن لـ SoftHand التعامل مع السلوك النمطي ، مثل فك أغطية العلب من العلب ، والظل مع العديد من محركاته يمكن أن يتكيف بشكل أفضل مع المهام المعقدة.
وسوف تتعامل SoftHand بسهولة مع التحية على القبضات.