مرحبا بالجميع! منذ وقت ليس ببعيد ، بدأت في دراسة البرمجة للمتحكم الدقيق. في البداية ، لم تعد كتابة برامج بسيطة لوميض مصباح LED أو حتى اثنين ممتعًا بل أصبحت مملة. وذات مساء ، جالسًا بالتفكير في ما يشغل رأسه به ، قرر العثور على مشاريع أكثر تعقيدًا. على الإنترنت ، رأيت الكثير من الأشياء التي يصنعها الناس ، ولكن الأهم من ذلك كله فوجئت بروبوت سداسي الأرجل أو سداسي الأرجل.
مستوحاة من الصور والفيديو ، قررت أن أجرب يدي. سيتم تطوير الحالة والالكترونيات والبرامج من 0.
مراحل التطور:الجزء 1 - التصميمالجزء 2 - التجميعالجزء 3 - الكينماتيكاالجزء 4 - مسارات الرياضيات وتسلسلهاالجزء 5 - الإلكترونياتالجزء 6 - الانتقال إلى الطباعة ثلاثية الأبعادالجزء 7 - الإسكان الجديد وبرمجيات التطبيق وبروتوكولات الاتصالتطوير نموذج ثلاثي الأبعاد للجسم
المواد الخام ومكونات الروبوت المستقبلي:
0. Arduno Due (سنكتب في Atmel Studio في لغة C خالصة بدون Arduino IDE ، وفي الوقت نفسه سأخبرك بكيفية توصيل مصحح أخطاء إلى هذا المنتدى) - 1 جهاز كمبيوتر ؛
1. HLK-RM04 (محول UART إلى WIFI) - جسر شفاف مع UART إلى WIFI - 2 قطعة ؛
2. Servos MG996R (من الصين ، كيف يمكن بدونها) - 18pcs ؛
3. LM317D2T-TR لتزويد الأجهزة المؤازرة + mussy بشكل جيد في شكل مقاومات ومكثفات ؛
4. CAD "بوصلة 3D" ؛
5. الخشب الرقائقي 3mm كمادة للحالة (رخيصة ورائحة لذيذة) ؛
6. القدرة على طلب القطع بالليزر.
7. الوقت. الكثير من الوقت.
في بداية الرحلة ، طرح السؤال: "ما نوع المبنى الذي أريده؟". في عملية العثور على إجابة لهذا السؤال ، صادفت العديد من الحلول الجاهزة. الأكثر إعجابًا بـ PhantomX و A-Pod. بعد أن نظرت في الحالات ، قررت أنه كان من المقرر أن يبدأ التطوير بالفعل ، ولكن لا. ظهرت المشكلة التالية: نظرًا لأنني لم أر هذه الروبوتات في عيني ولم أحملها في يدي ، كان لدي فكرة سيئة عن أبعادها. بحثًا عن حل لهذه المشكلة ، صادفت أحد المقالات على هبر.
أطلعني كاتب المقال
تومنيمان على رسومات مشروعه ، والتي
تشكره كثيرًا.
بعد تقديري لأبعاد التفاصيل المستقبلية والتفكير في جميع المعلومات الواردة ، بدأت في رسم رسومات الحالة. اعتقدت أنه سيكون من الحكمة أن نبدأ بتصميم الأرجل ، لأنها أصعب جزء من الجسم.
كوكسا
بعد عدة ساعات من التفكير ، ظهر نموذج Coxa الأول (من المعتاد الإشارة إلى العقدة التي تربط الساق بالجسم). حاولت العقدة جعلها مضغوطة قدر الإمكان. سيكون محرك الأقراص المؤازر في الداخل تمامًا ، لذلك يجب ألا تنسى (وهو ما فعلته في المرة الأولى) حول الفتحة الخاصة بإخراج الأسلاك.
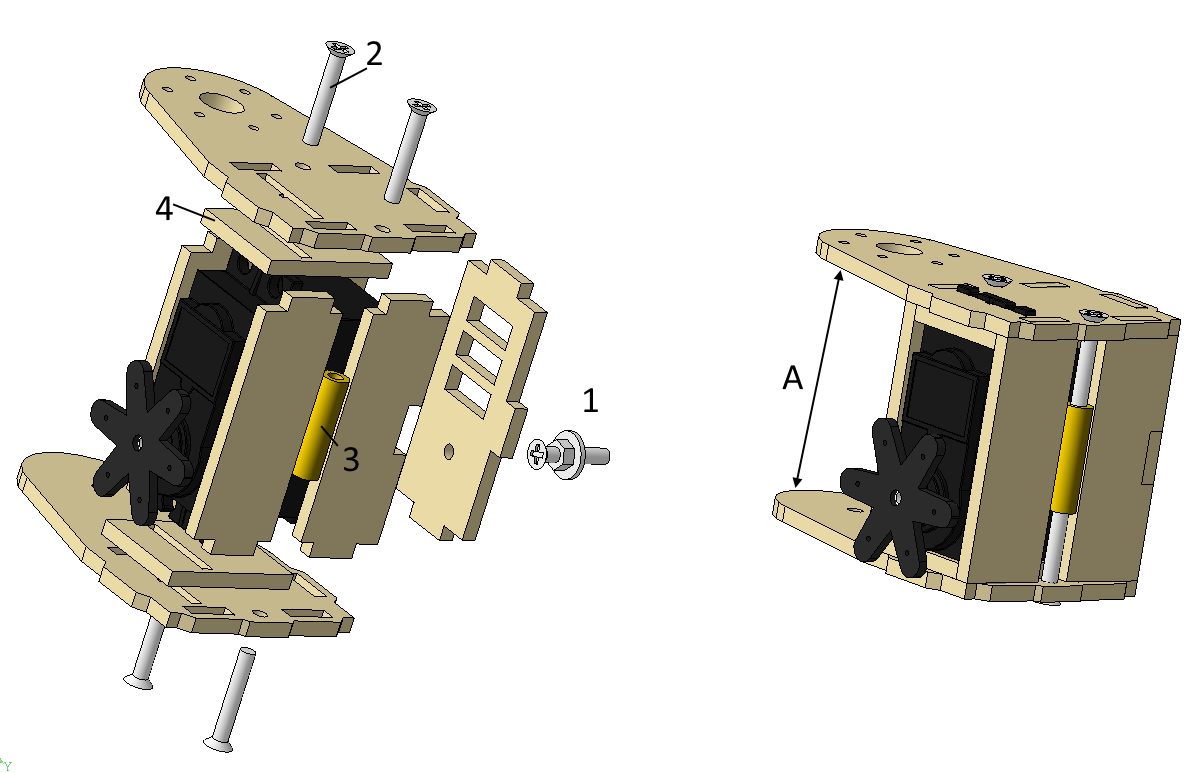 التفاصيل 1 - المحور الذي سيتم إرفاق فيمور عليه (الجزء الثاني من الساق). تجميعها من المسمار M3x15 ، غسالة M3 والجوز
التفاصيل 1 - المحور الذي سيتم إرفاق فيمور عليه (الجزء الثاني من الساق). تجميعها من المسمار M3x15 ، غسالة M3 والجوز
الجزء 2 - برغي M3x20
الجزء 3 - رف لثنائي الفينيل متعدد الكلور M3x20
التفاصيل 4 - هي نوع من أقفال المؤازرة لمنعها من التحرك عموديًا.
يجب عمل الارتفاع (A) لهذه العقدة بحيث يمكن تركيب محرك سيرفو الذي سيقف على الإطار في الداخل.فيمور
بعد ذلك ، تحتاج إلى القيام "Femur". تبين أن التفاصيل هي أبسط شيء على الإطلاق ، وأعتقد أنها لا تحتاج إلى تعليقات.
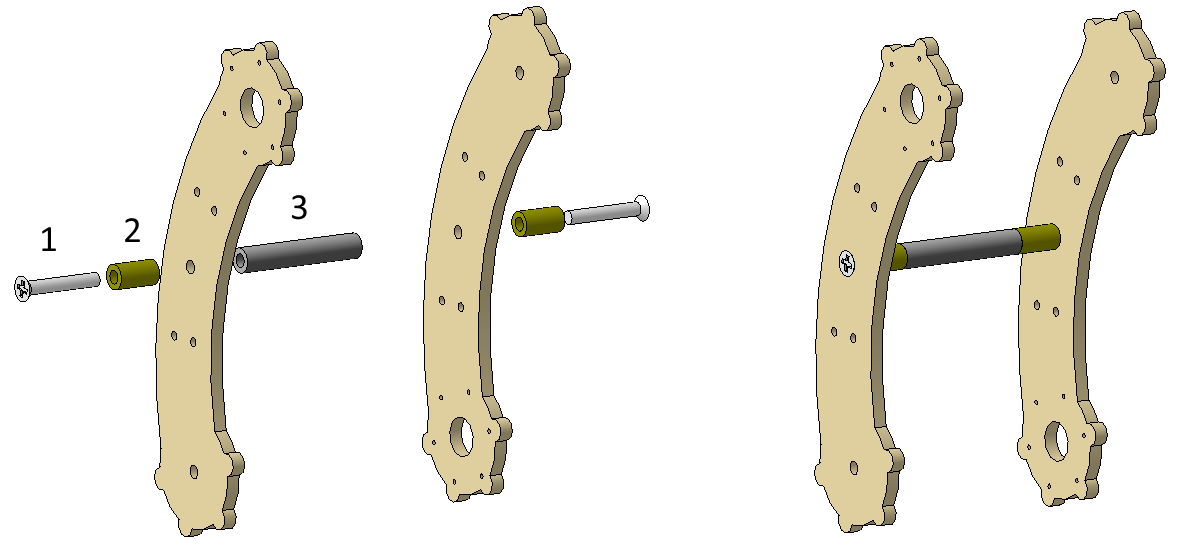 الجزء 1 - برغي M3x20
الجزء 1 - برغي M3x20
التفاصيل 2 - غلاف بلاستيكي 3 × 10 (لم أجد حاملًا طويلاً ، كان علي البحث عن حلول أخرى)
الجزء 3 - رف لثنائي الفينيل متعدد الكلور M3x30الظنبوب
التفاصيل التالية هي الساق ، الجزء الأخير من الساق. لا ينبغي أن يكون هناك أي مشاكل معها وطولها يعتمد على الارتفاع الذي من المخطط أن يفهمه الروبوت. لدي عند 130 مم من محور الماكينة ، لم أفعل ذلك بعد الآن ، لأنه مع زيادة الطول يزداد الحمل على الماكينات أيضًا ، خاصة على الماكينة في Coxa. على الجانب الثاني ، قمت بعمل ثقب ثان للمحور بحيث يمكن قلب المؤازرة ويمكن تقليل طول الذراع إذا كانت الماكينة صعبة فجأة.
الإطار
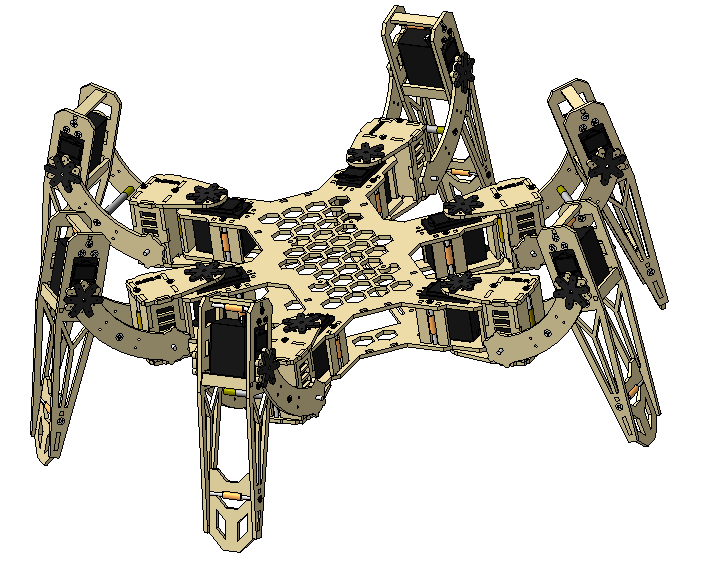
التالي في الخط هو الإطار - الجزء الأكبر. هي التي تحدد تكوين أرجل الروبوت المستقبلي. هناك العديد من الخيارات لموقع الساقين ، لكنني استقرت على الخيار بحرف Zh (عند النظر إليه من الأعلى ، مشابه).
في المراحل الأولى من التصميم ، طرح السؤال: "وكم المسافة التي يجب أن تكون فيها الأرجل عن بعضها البعض؟" بحثًا عن إجابة لهذا السؤال ، أدركت أنه لا توجد توصيات حول هذا الموضوع. درس مشاريع الآخرين وخيارات المشية ، وخلص إلى أنه تم تحديد المسافة بناءً على أقصى زاوية دوران مطلوبة للطرف. كلما زادت المسافة بين الساقين ، زادت الزاوية التي يمكن للأطراف الوصول إليها أثناء المشي.
ساعدتني رسومات
توم نويمان في حل هذه المشكلة ، التي أخذت منها المسافة بين الساقين ، لأن أبعاد الروبوتات كانت متشابهة إلى حد كبير (حجمي أصغر قليلاً). بعد بضع ساعات ، ولدت الأجزاء العلوية والسفلية من الإطار:
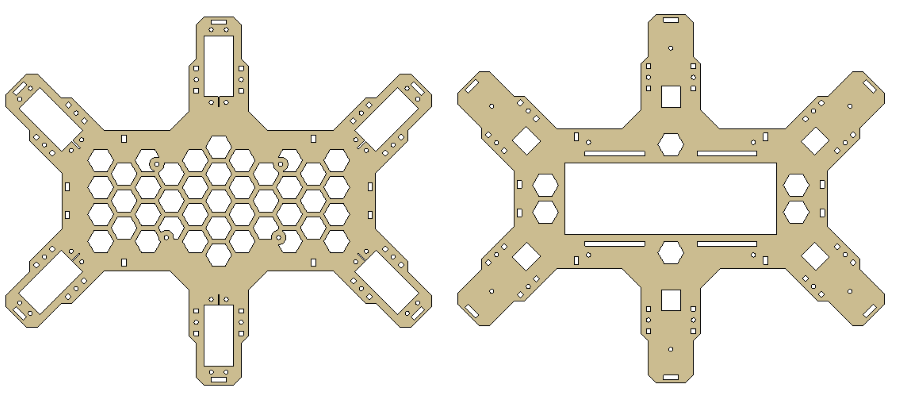
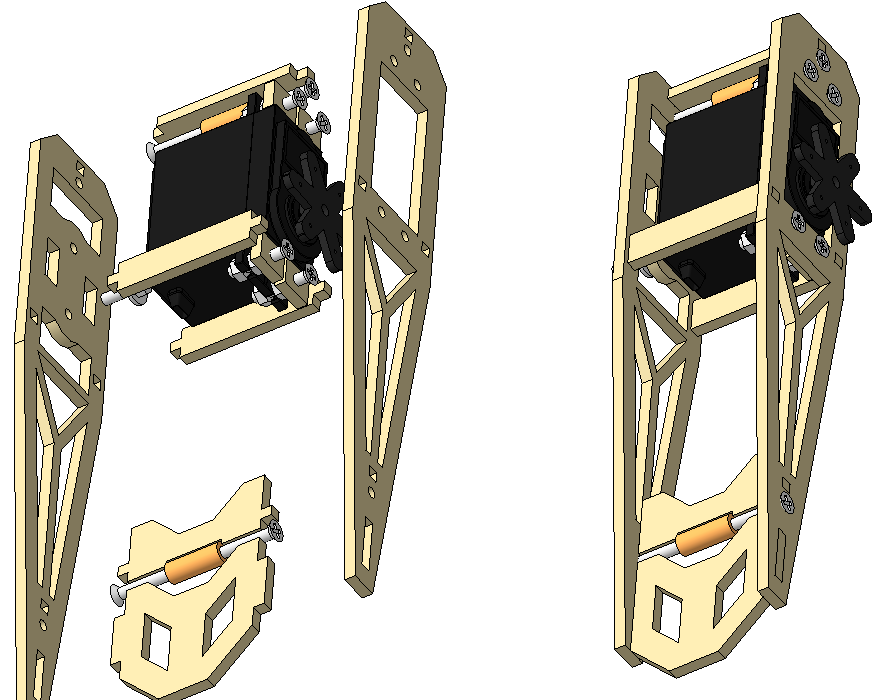
في الجزء السفلي من الإطار ، يتم عمل قطع للبطارية ومثبتاتها. بالمناسبة ، سيتم تثبيتها باستخدام Velcro ، والتي يتم استخدامها على التربيع عند توصيل البطارية بها. الإطار كبير جدًا. بعد الجلوس ليلة واحدة أخرى وعمل أجزاء وسيطة على شكل دعامات بين الأجزاء ، قررت أن الوقت قد حان لتجميع الإطار مع الماكينات المثبتة. لم تكن النتيجة طويلة:
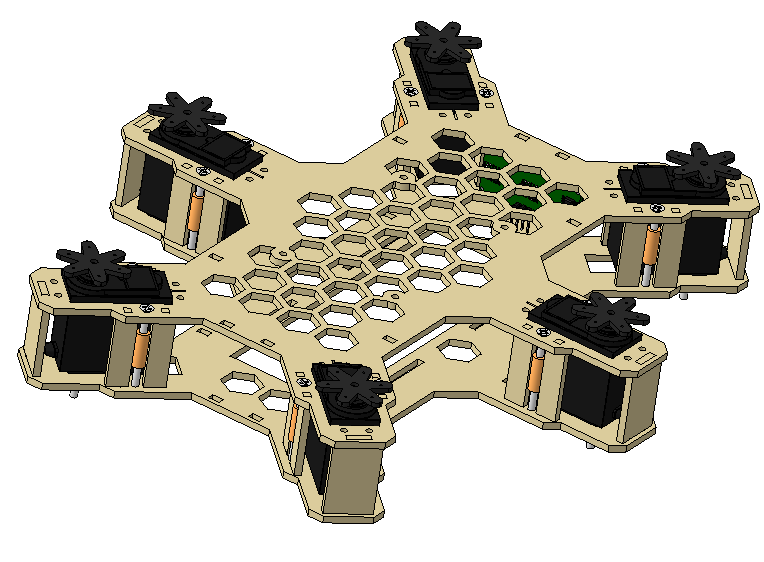
نظرًا لأن لدينا بالفعل جميع المكونات الضرورية ، يمكنك إجراء تجميع كامل للحالة:
في وسط العلبة بين اللوحات ، كان من المخطط أن يكون هناك مصدر طاقة لأجهزة الماكينة وبطارية 3S Li-po في الأسفل ولوحة تحكم (Arduino Due) في الأعلى. وفقًا لذلك ، قمت بتغيير تجميع الإطار:
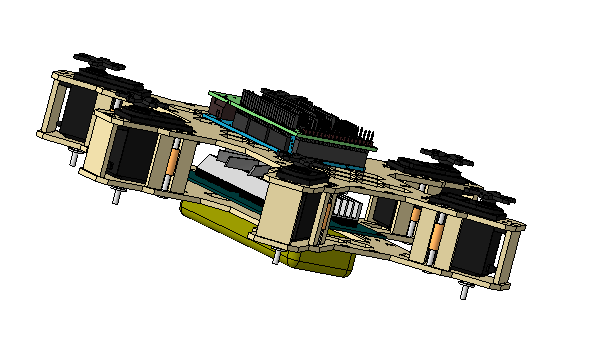 اللوحة في الأعلى هي نموذج Arduino Mega مع نوع من الدرع. يتم استخدامه فقط للمظهر وله نفس الأبعاد مثل المستحقة.
اللوحة في الأعلى هي نموذج Arduino Mega مع نوع من الدرع. يتم استخدامه فقط للمظهر وله نفس الأبعاد مثل المستحقة.لا يبدو الأمر لطيفًا جدًا ، ولكن مع مراعاة الأسلاك التي ستتمسك بها ستكون أسوأ. بالإضافة إلى ذلك ، بدا لي الجسد نحيفًا جدًا. قررت تغطية الإلكترونيات قدر الإمكان دون التأثير على المظهر وأخرج اسمًا لأفكار عقلي.
كان الحل للمشكلة الأولى هو الأغطية في الأعلى والأسفل ، وتغطي البطارية والتحكم الإلكترونيات. هذه هي الأجزاء الوحيدة التي سيتم تجميعها بالغراء. بعد ذلك بمساء ، وُلد نموذج الغطاء السفلي.
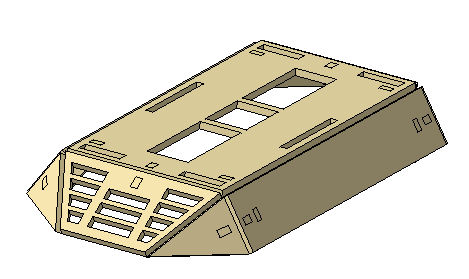
إذا لم تكن هناك مشاكل في المهمة الأولى ، ففي المهمة الثانية كانت هناك صعوبات لمدة يومين. نعم ، لقد استغرق الأمر مني الكثير من الوقت للتو للتو إلى اسم له. قرر فيلم "Terminator" بطريق الخطأ تسميته "Skynet" وقطع الاسم على الغلاف العلوي. وأضاف أيضا القواطع ل HC-SR04.
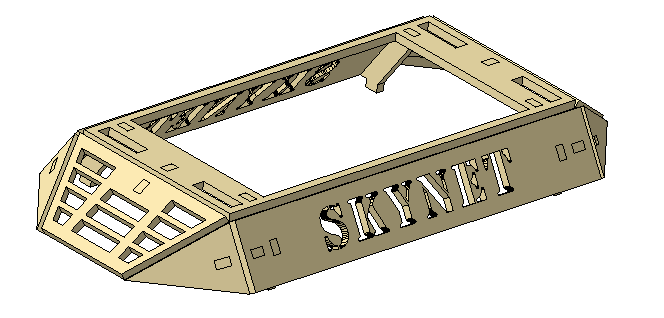
نتيجة لإضافة سقفين فقط ، قام الجسم بتغيير المظهر بشكل كبير للأفضل:

النتيجة التي أعجبت بها للغاية والمظهر جذاب للغاية. في
الجزء الثاني سأخبر عن تجميع القضية وأشعل النار التي خطوت عليها.