عند قراءة التعليقات على مقالتي السابقة حول APDS-9960 ، حيث كان الأمر يتعلق بالتعرف على الألوان ومستوى الضوء ، أصبح هناك شيئان واضحان بالنسبة لي: 1) موضوع التعرف على الإيماءات مثير للاهتمام و 2) لم يتم الكشف عن هذا الموضوع.
في الواقع ، إذا تناولت وصف APDS-9960 ، فعندئذٍ دون النظر إلى الإيماءات ، يبدو الوصف غير مكتمل إلى حد ما. لذلك وجدت بعض الوقت الحر لاستكشاف هذا الموضوع أيضًا.
في هذه المقالة ، استرعي انتباهك إلى نظرة عامة على إمكانات التعرف على الإيماءات التي يوفرها مستشعر APDS-9960.
ستنظر المقالة في آلية إعداد المستشعر وجمع البيانات ومعالجتها وعرضها. يمكنك أن ترى بنفسك مدى سهولة العمل مع الإيماءات باستخدام APDS-9960.
كما في المرة الأخيرة ، سيصاحب المقال رمز ، كل ما يحدث سيتم وصفه بالتفصيل. النسخة الكاملة من الكود متاحة في نهاية المقال.
ملاحظة صغيرة فورًا: لا يحتوي APDS-9960 على آلية تلقائية مدمجة للكشف عن الإيماءات ؛ هذا هو ، مثل هذا هنا ، قرأت ، يعني ، التسجيل ، وهناك بالفعل لفتة معالجة - هذا ليس في APDS-9960 ؛ وهذا يعني أنه يجب عليك كتابة خوارزمية تفسير الإيماءات الخاصة بك ، والتي سنفعلها لاحقًا.
بشكل عام ، هذا جيد وغير جيد على حد سواء. ليس في الحقيقة - لأنه يمكن أن يعقد دراسة هذا المستشعر للمبتدئين ، ولكنه جيد ، لأنه ، إلى جانب بيانات التقريب ، يمكنك ، عن طريق التنقيح ، حتى الخروج بإيماءاتك الخاصة من مختلف الأنواع وأي شيء.
ولكن ، نظرًا لأن هذه المقالة تحتوي على وظيفة نظرة عامة فقط ، فإننا نقتصر على إيماءات UP-DOWN-LEFT-RIGHT الأساسية فقط.
حسنًا ، لنبدأ.
النظرية
سأسمح لنفسي ببعض العتاد.
للحصول على المعلومات اللازمة حول حركة واتجاه الحركة ، يستخدم APDS-9960 LED IR وأربعة صمامات ضوئية ، والتي ، كما هو موضح في الشكل أدناه ، تكشف الإشارات في نطاق الأشعة تحت الحمراء القريبة (NIR).
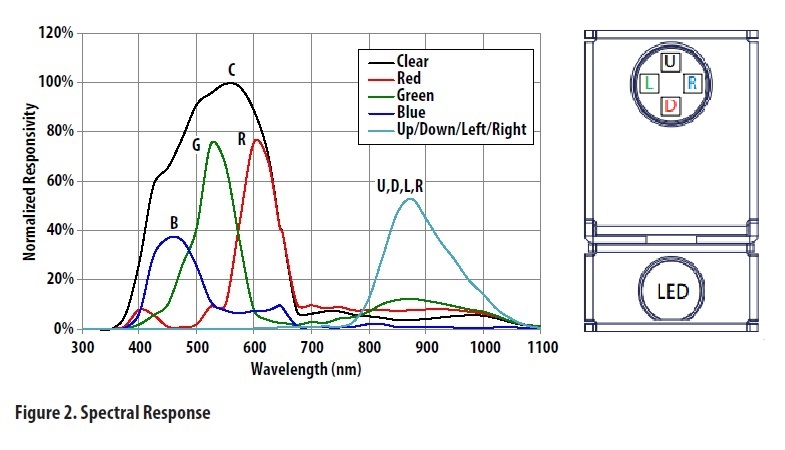
وظيفة IR LED (LED) لها وظيفة الإضاءة الخلفية ، وتسجيل الصمامات الثنائية الضوئية (UDLR) الضوء المنعكس من "العائق".
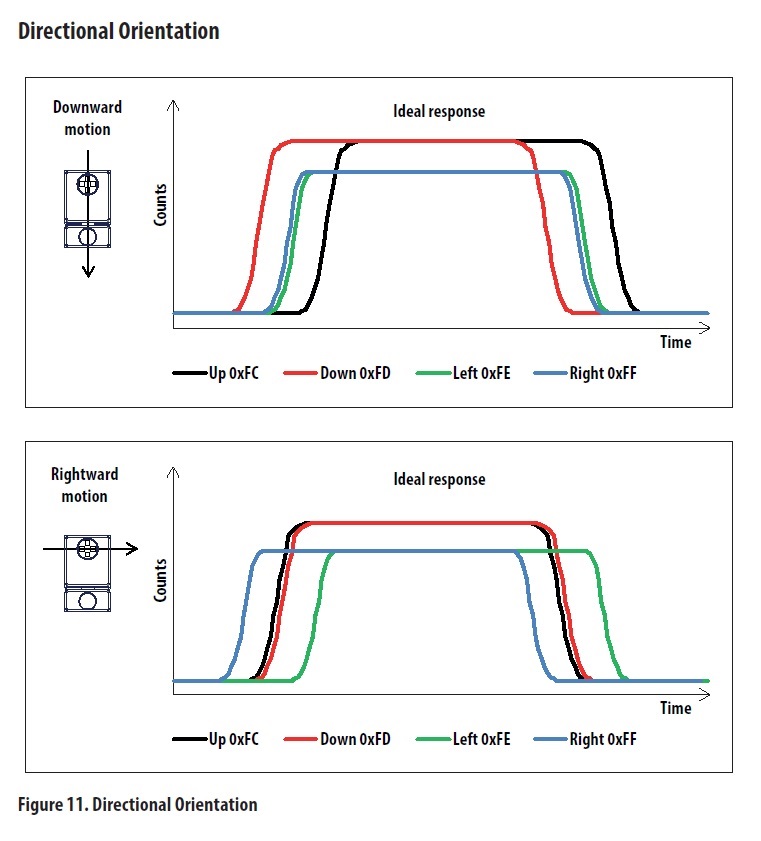
توجد الثنائيات الضوئية على المستشعر بطريقة ، اعتمادًا على اتجاه حركة "العائق" ، سيتلقى الثنائي الضوئي المقابل معظم إشارة الأشعة تحت الحمراء المنعكسة عند الإدخال وجزءًا أصغر عند الإخراج. في الوقت نفسه ، تخبرنا الوثائق الموجودة على APDS-9960 بشكل لا لبس فيه أنه يمكنك تفسير اتجاه الحركة عن طريق قياس ومقارنة السعة وفرق الطور للإشارات من الثنائيات الضوئية UDLR.
تدرب
للعمل مع APDS-9960 ، وكذلك
في المرة الأخيرة ، سنستخدم STM32VLDISCOVERY. لم يتغير الاتصال أيضًا.
تكوين APDS-9960نجعل الإعداد الأولي لجهاز الاستشعار.
مثل هذا:
APDS9960_initvoid APDS9960_init(void) { i2c1_write(APDS9960_CONTROL, DEFAULT_PGAIN); i2c1_write(APDS9960_GPENTH, DEFAULT_GPENTH); i2c1_write(APDS9960_GEXTH, DEFAULT_GEXTH); i2c1_write(APDS9960_GCONF2, DEFAULT_GGAIN); i2c1_write(APDS9960_GPULSE, DEFAULT_PULSE_LENGTH); i2c1_write(APDS9960_PPULSE, DEFAULT_PULSE_LENGTH); }
ما الذي يحدث هنا؟ دعنا نحصل على حق.
i2c1_write(APDS9960_CONTROL, DEFAULT_PGAIN);
PGAIN (التحكم في اكتساب القرب) هي معلمة تتحكم في اكتساب حساسية التقارب. قم بتعيين قيمة 2 ، والتي تقابل أربعة أضعاف الكسب.
i2c1_write(APDS9960_GPENTH, DEFAULT_GPENTH); i2c1_write(APDS9960_GEXTH, DEFAULT_GEXTH);
GPENTH (القرب من لفتة الدخول سجل عتبة) - تحدد هذه المعلمة قيمة عتبة القرب لتحديد بداية التعرف على الإيماءات.
يحدد GEXTH (سجل حد الخروج من الإيماءة) ، على التوالي ، قيمة الحد لتحديد نهاية التعرف على الإيماءة.
i2c1_write(APDS9960_GCONF2, DEFAULT_GGAIN);
في تسجيل GCONF2 (تكوين الإيماءة 2) ، قمنا صراحةً بتعيين معلمة GGAIN (التحكم في اكتساب الإيماءات) إلى أربعة أضعاف قيمة الكسب.
i2c1_write(APDS9960_GPULSE, DEFAULT_PULSE_LENGTH); i2c1_write(APDS9960_PPULSE, DEFAULT_PULSE_LENGTH);
الإضاءة الخلفية بشكل افتراضي ، يتم تعيين قيمة المصدر الحالي لمصباح LED الخلفي IR على 0 ، وهو ما يتوافق مع تيار 100 مللي أمبير ، وهذا يناسبنا تمامًا - لن نقوم بتغييره.
إن إضاءة IR في APDS-9960 عبارة عن سلسلة من النبضات وتتميز بمعلمات التسجيل المقابلة لإيماءات GPULSE (عدد نبضات الإيماءات وطولها): GPLEN (طول نبضة الإيماءات) و GPULSE (عدد نبضات الإيماءات) ، بالإضافة إلى تقريب PPULSE (سجل عدد نبضات التقارب) ): PPLEN (طول النبض التقريبي) و PPULSE (عدد نبضات التقارب) يحددان عدد النبضات وفترة كل نبضة فردية.
حدد أن GPLEN و PPLEN سيأخذان قيمة 2 تساوي 16 μs ، و GPULSE و PPULSE بقيمة 9 ، والتي تقابل 10 نبضات.
كما ترى ، تبين أن الإعداد أكثر تعقيدًا قليلاً من الإعداد المماثل للتعرف على الألوان والإضاءة من مراجعة APDS-9960 السابقة.
قراءة البياناتننتقل الآن إلى دورة البرنامج الرئيسية ، حيث نبدأ في تسجيل وتفسير البيانات من الثنائيات الضوئية بين الحين والآخر ، ونتعلم أيضًا كيفية التمييز بين إيماءة من أخرى.
أولاً ، فلنبدأ APDS-9960 بوظائف للعمل مع الإيماءات والتكبير.
GesturesSet(GESTURES_START);
وعلى الفور نبدأ في تتبع معلمة GVALID. GVALID (بيانات الإيماءات FIFO) هي معلمة في سجل GSTATUS (سجل حالة الإيماءات) ، والتي ، في حالة غير الصفر ، تُعلمنا أن المستشعر يحتوي على بيانات إيماءات قابلة للاستخدام.
تعلمنا الوثائق أن معلومات الإيماءات موجودة في المخزن المؤقت ، في منطقة ذاكرة الوصول العشوائي ، والتي يبلغ حجمها بشكل عام 32 × 4 بايت.
من الناحية العملية ، يمكن العثور على الحجم الفعلي لهذا المخزن المؤقت من خلال قراءة قيمة سجل GFLVL (مستوى إيماءة FIFO) ، أي وفقًا لملاحظاتي التجريبية التجريبية البحتة ، يتم الحصول على GFLVL * 4. شيء من هذا القبيل:

حسنًا ، على النحو التالي من اسم المخزن المؤقت ، يتم ترتيب البيانات الموجودة فيه بالترتيب First In - First Out. أي ، تقريبًا ، "في وقت سابق" وصلت الإشارة من كل من الثنائيات الضوئية ، "أعلى" في GFLVL.
يمكن قراءة البيانات من الثنائيات الضوئية (UDLR) من سجل الإيماءات FIFO المقابل:
- GFIFO_U (بيانات إيماءة FIFO ، UP)
- GFIFO_D (إيماءات FIFO ، لأسفل)
- GFIFO_L (بيانات الإيماءة FIFO ، اليسار)
- GFIFO_R (بيانات إيماءة FIFO ، يمين)
بعد كل قراءة للقيم من هذه السجلات ، يتم إنقاص GFLVL ؛ وبالتالي ، بطريقة جيدة ، من الضروري قراءة المخزن المؤقت بأكمله حتى يصل GFLVL إلى الصفر.
لتحديد الإيماءات ، نحتاج فقط إلى البايتات الأربعة الأولى من هذا المخزن المؤقت ، وليس أكثر. لذلك ، سوف نقرأها فقط.
GestureUp = i2c1_read(APDS9960_GFIFO_U); GestureDown = i2c1_read(APDS9960_GFIFO_D); GestureLeft = i2c1_read(APDS9960_GFIFO_L); GestureRight = i2c1_read(APDS9960_GFIFO_R);
التعرف على الإيماءاتلتفسير نوع الإيماءة التي حدثت ، سنجري حسابات بسيطة:
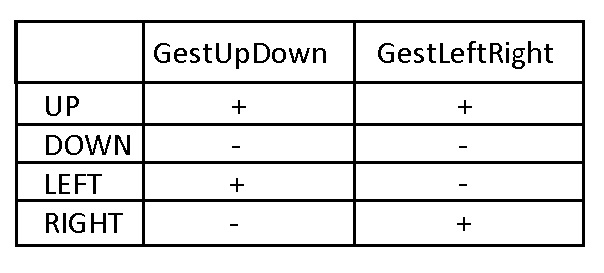
GestUpDown = GestureUp-GestureDown; GestLeftRight = GestureLeft-GestureRight;
لتحديد أي من الإيماءات التي حدثت في الوقت الحالي ، ليست قيم GestUpDown و GestLeftRight هي التي تهمنا ، ولكن فقط علامة الرقم الحقيقي ، إذا جاز التعبير.
بمعنى آخر ، مع أخذ القيم السلبية والإيجابية لمتغيري GestUpDown و GestLeftRight كمدخل ، نحدد أي إيماءة مثالية.
يظهر جدول الحقيقة للمتغيرات GestUpDown و GestLeftRight في الشكل أدناه.
أعد ضبط GFLVL الآن:
GesturesSet(GESTURES_STOP);
... والعودة إلى بداية دورة البرنامج الرئيسية.
والآن الرمز بالكامل:
الرئيسية ج #include "stm32f10x.h" #define APDS9960_I2C_ADDR 0x39 #define APDS9960_ENABLE 0x80 #define APDS9960_GSTATUS 0xAF #define APDS9960_GFLVL 0xAE
أريد أن أشير إلى أن آلية إيماءات APDS-9960 تعمل بشكل جيد للغاية. الاعتراف مستقر ، تعمل المرشحات المدمجة في APDS-9960 UV و IR بشكل جيد.
آمل أن تكون هذه المواد مفيدة لشخص ما. شكرا لكم على اهتمامكم.