تعتزم الشركات الناشئة في جامعة كارنيجي ميلون قيادة التقاطع باستخدام الراديو في سيارات المستقبل

الحياة قصيرة ، وفي حركة المرور تبدو أقصر. أو عندما تقف عند إشارة مرور ، يضيء الضوء الأحمر ، ولا أحد يقود سيارته على طول الطريق المتقاطع.
في ضواحي المدن مثل مكسيكو سيتي وساو باولو وروما وموسكو وبكين والقاهرة ونيروبي ، يمكن أن تتجاوز القيادة الصباحية للعمل ساعتين. أضف الطريق إلى المنزل من العمل هنا ، وغالبًا ما يقضي الأشخاص 3-4 ساعات على الطريق يوميًا.
تخيل أنه يمكننا تطوير نظام يقلل من رحلة الذهاب والعودة اليومية ، على سبيل المثال ، بمقدار الثلث - من ثلاث إلى ساعتين. هذا يمكن أن يوفر لك 22 ساعة في الشهر ، أو 3 سنوات في مهنة 35 سنة.
خذ قلبي ، غير سعيد المسافرين للعمل والمنزل ، حيث يتم بالفعل تطوير مثل هذا النظام ، ويستند إلى العديد من التقنيات الحديثة. أحدها هو الاتصال اللاسلكي بين السيارات. غالبًا ما يشار إليها باسم تقنية V2V (من مركبة إلى مركبة) ، على الرغم من أنه قد يتم أيضًا تضمين إشارات المرور والبنية التحتية الأخرى في هذا الاتصال. هناك تقنية ناشئة أخرى هي السيارات الآلية ، والتي بطبيعتها يجب أن تقلل من الوقت الذي يسافرون إليه للعمل (وجعل هذه المرة أكثر إنتاجية). وهناك أيضًا
إنترنت الأشياء (IoT) ، الذي يعد بجمع ليس فقط 7 مليار شخص ، ولكن أيضًا 30 مليار مستشعر وجهاز.
يمكن عمل كل هذه التقنيات للعمل معًا باستخدام خوارزمية طورتها أنا وزملائي في جامعة كارنيجي ميلون في بيتسبرغ. تسمح الخوارزمية للسيارات بالعمل معًا باستخدام أنظمة المراسلة الموجودة على متنها بحيث تتحرك السيارات بسلاسة وأمان دون استخدام أي إشارات مرور. بالنسبة لهذا المشروع ، قمنا بتسجيل شركة Virtual Traffic Lights [VstL) ، وفحصنا الخوارزمية بعناية في المحاكاة ، ومنذ مايو 2017 ، كان هذا المشروع يعمل بالقرب من حرم الجامعة. في يوليو ، أظهرنا لأول مرة لتقنية VTL العامة في المملكة العربية السعودية ، والتي حضرها أكثر من 100 عالم ومسؤول حكومي وممثلون عن شركات خاصة.
أكدت نتائج الاختبار ما كنا نشتبه به بالفعل: حان الوقت لرفض إشارات المرور. ليس لدينا ما نخسره سوى ساعات لا تحصى من الجلوس في سيارة في حركة المرور.
لم يتغير مبدأ إشارة المرور كثيرًا منذ اختراع هذا الجهاز في عام 1912 وإدخاله في سولت ليك سيتي ، وبعد ذلك بعامين في كليفلاند [
من الجدير بالذكر أننا نتحدث عن أول إشارة مرور كهربائية. تم اختراع أول جهاز بمحرك يدوي في لندن في القرن التاسع عشر / تقريبًا. perev. ]. إنه يعمل على جهاز توقيت ، لذلك أحيانًا تقف على اللون الأحمر عند التقاطع ولا ترى سيارات أخرى قريبة. يمكن ضبط المؤقت بحيث يتوافق مع أنماط الحركة في أوقات مختلفة من اليوم ، ولكن هذا كل ما يمكن فعله عمليًا - وليس كثيرًا [
هنا المؤلفون ماكرون - هناك منذ فترة طويلة أنظمة تحكم آلي في حركة المرور مع كاميرات تلتقط حركة المرور ، و أنظمة التحكم في حركة المرور عن بعد من المركز ، حيث يراقب الناس الازدحام المروري / تقريبا. perev. ]. ونتيجة لذلك ، يقضي الكثير من الناس الكثير من الوقت كل يوم.
تخيل أنه بدلاً من ذلك ، تقود العديد من السيارات إلى تقاطع ، حيث تتبادل البيانات بفضل تقنية V2V. إنهم يصوتون بشكل مشترك ويختارون سيارة رائدة لفترة معينة يقرر فيها الاتجاه الذي سيصبح الرئيسي - أي ما يعادل الضوء الأخضر - وفي أي اتجاه "يضيء الأحمر".
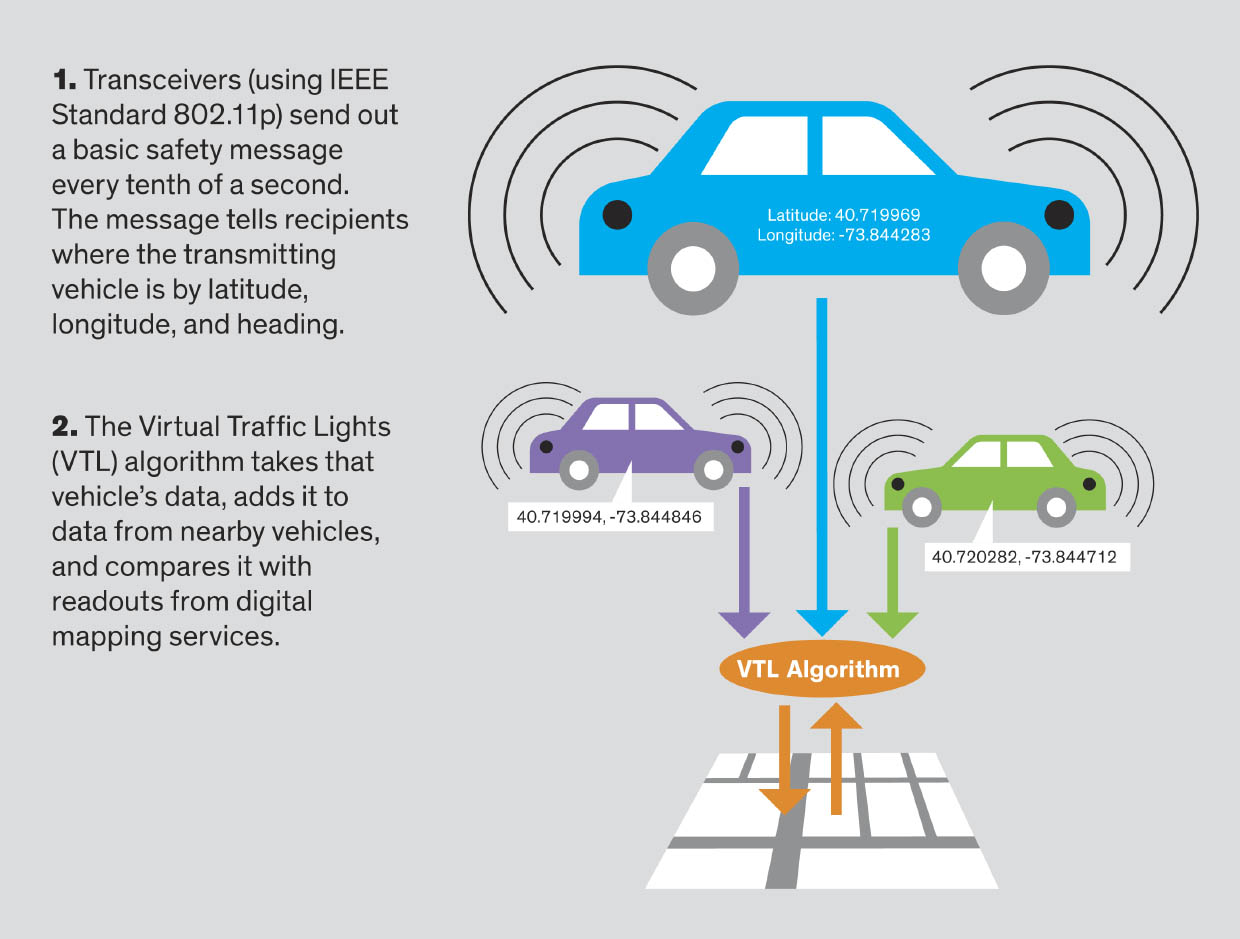 ترسل أجهزة الإرسال / الاستقبال IEEE 802.11p الرسائل 10 مرات في الثانية. تشير الرسالة إلى إحداثيات الآلة واتجاه الحركة.
ترسل أجهزة الإرسال / الاستقبال IEEE 802.11p الرسائل 10 مرات في الثانية. تشير الرسالة إلى إحداثيات الآلة واتجاه الحركة.
تتلقى الخوارزمية البيانات وتضيفها إلى بيانات الأجهزة الأخرى ، وتقارنها بالبطاقات الرقمية.ومن لديه الطريق الرئيسي؟ كل شيء يحدث بكل بساطة واحترام. يعين القائد حالة الضوء الأحمر لاتجاه حركته ، ويعطي الضوء الأخضر لجميع السيارات التي تسير بشكل عمودي. بعد 30 ثانية ، على سبيل المثال ، تصبح آلة أخرى ، بتدفق عمودي ، هي القائدة ، وتفعل الشيء نفسه. يتم نقل القيادة باستمرار هنا وهناك لتقاسم المسؤولية والأعباء بصدق - بعد كل شيء ، يرتبط منصب القائد بالتضحية بالمصالح الشخصية من أجل الصالح العام.
مع هذا النهج ، لا حاجة لإشارات المرور. يذوب عمل التحكم في المرور بسلاسة في البنية التحتية اللاسلكية. لن تكون جالسًا في السيارة بعد الآن ، وتقف عند إشارة المرور الحمراء إذا لم يكن هناك من يقود على طول شارع متقاطع.
تختار خوارزمية VTL القادة من خلال استجواب معلمات مثل المسافة إلى السيارة الأمامية من كل مدخل إلى التقاطع ، وسرعة السيارات ، وعدد السيارات في كل طريق ، وما إلى ذلك. عندما تكون الأشياء الأخرى متساوية ، تختار الخوارزمية السيارة الموجودة في أبعد مسافة عن التقاطع بحيث يكون لديها وقت للفرملة. تضمن هذه القاعدة حصول المركبة الأقرب إلى الدوار على الطريق الصحيح - أي ضوء أخضر افتراضي.
من المهم أن نلاحظ أن التكنولوجيا لا تحتاج إلى الكاميرات والرادارات والأغطية. يتلقى جميع المعلومات من الأنظمة اللاسلكية التي تعمل عبر اتصالات مخصصة قصيرة المدى (
DSRC ). وهي عبارة عن دوائر راديو وقناة اتصال مخصصة لهم ، تم تطويرها في الولايات المتحدة الأمريكية وأوروبا واليابان من 1999 إلى 2008 ، وتسمح للسيارات القريبة بالتواصل مع بعضها البعض. تصور مطورو DSRC خيارات مختلفة لاستخدام المعيار ، بما في ذلك جمع الأموال لاستخدام الطرق المرورية ونظام التحكم في السرعة التكيفي التعاوني - بالإضافة إلى الوظيفة التي نستخدمها بالضبط لتجنب الاصطدامات عند التقاطعات.
من المصنع ، يتم وضع نظام DSRC على عدد صغير من الآلات (وربما
ستحل تقنية 5G الجديدة
محلها ). ولكن
يمكن شراء أجهزة الإرسال والاستقبال هذه ، ولديهم كل الوظائف التي نحتاجها. يستخدمون
معيار IEEE 802.11p ويطلب منهم إرسال الرسائل عشر مرات في الثانية. يجب أن تشير الرسالة إلى إحداثيات واتجاه حركة السيارة. تتلقى الخوارزمية لدينا ، التي تعمل على كمبيوتر السيارة ، بيانات عن السيارة ، وتضيف البيانات التي تتلقاها من الأجهزة المجاورة ، وتفرض النتيجة على بطاقات رقمية مثل خرائط Google أو خرائط Apple أو OpenStreetMap.
بهذه الطريقة ، يمكن لكل سيارة حساب المسافة إلى التقاطع والسيارات الأخرى التي تقترب منه من اتجاهات أخرى. يمكنها أيضًا حساب السرعة والتسارع ومسار كل من الآلات. هذا كل ما تحتاجه الخوارزمية لتقرير من سيخترق التقاطع (الضوء الأخضر) ومن يحتاج إلى التوقف (الأحمر). بعد ذلك ، ستظهر لوحة القيادة لكل سيارة لون إشارة المرور ، خاص بها لكل سائق. بطبيعة الحال ، لا تحل خوارزمية VTL سوى مشكلة التحكم في حركة المرور عند التقاطعات ، وتعريف العلامات "توقف" و "تفسح الطريق". لا يقود سيارة. ولكن من خلال العمل في مجالها ، فإن VTL قادرة على القيام بكل ما تحتاجه ، وهي أرخص بكثير من تكنولوجيا السيارات المستقلة بالكامل. تحتاج الروبوتات إلى قوة حوسبة أكبر بكثير فقط لمعرفة البيانات القادمة من lidars وراداراتها وكاميراتها وأجهزة الاستشعار الأخرى ، وأكثر من ذلك ، بحيث تجمع هذه الصور مع المساحة المحيطة بها. لا تتنافس VTL مع تكنولوجيا السيارات الآلية ، فهي تكملها.
يمكن تخيل طريقتنا كبديل لقاعدة عملية بالذكاء الحقيقي. تسمح الخوارزمية للآلات بالتحكم في حركة المرور نفسها ، كما تفعل مع مستعمرات الحشرات ومدارس الأسماك. تقوم مدرسة للأسماك في نفس الوقت بتغيير اتجاه حركتها ، دون أن يقوم بعض كبار مراقب المرور بتوجيه أفرادها. تتلقى كل سمكة معلومات الحركة من الأسماك المجاورة.
هذا مثال على سلوك النظام الموزع كبديل للشبكة المركزية. بمساعدتها ، يمكن لأسطول السيارات في المدينة أن ينظم حركة المرور بشكل مستقل دون سيطرة مركزية وتدخل بشري - لا توجد شرطة أو إشارات مرور أو تتوقف أو تعطي إشارات الطريق.
لم نبتكر مفهوم التقاطعات الذكية ، فقد كان موجودًا منذ عدة عقود. كانت إحدى الأفكار المبكرة هي تثبيت ملفات مغناطيسية تحت سطح الأسفلت ، والتي ستحدد نهج السيارات عند التقاطع وتعديل مدة المرحلتين الخضراء والحمراء. يمكنك أيضًا استخدام الكاميرات عند التقاطعات لحساب السيارات المقتربة وحساب أفضل وقت لمراحل إشارات المرور. لكن كلا التقنيتين مكلفتان للتثبيت والصيانة ، وبالتالي يتم تثبيتهما عند تقاطعات قليلة.
بدأنا بتقديم خوارزمية VTL في النماذج الافتراضية لمدينتين: بيتسبرغ في الولايات المتحدة الأمريكية وبورتو في البرتغال. أخذنا بيانات حركة المرور من مكتب الإحصاء الأمريكي والوكالة البرتغالية ذات الصلة ، وأضفنا خرائط من خرائط Google ، وأدخلناها كلها إلى SUMO (
محاكاة الحركة الحضرية ، محاكي حركة المرور في المناطق الحضرية) - برنامج مفتوح المصدر تم تطويره من قبل مركز الفضاء الألماني.
قامت SUMO بمحاكاة ساعة الذروة في سيناريوهين - أحدهما يستخدم إشارات المرور الحالية ، والآخر يستخدم خوارزمية VTL. تم العثور على VTL لتقليل متوسط وقت السفر من 35 دقيقة إلى 21.3 دقيقة في بورتو ومن 30.7 دقيقة إلى 18.3 دقيقة في بيتسبرغ. انخفض انخفاض وقت سفر الأشخاص الذين يدخلون المدينة من الضواحي بنسبة لا تقل عن 30 ٪ ، وحتى 60 ٪. الأهم من ذلك ، أن الاختلاف في وقت السفر - انحراف الكمية عن المتوسط - انخفض أيضًا.
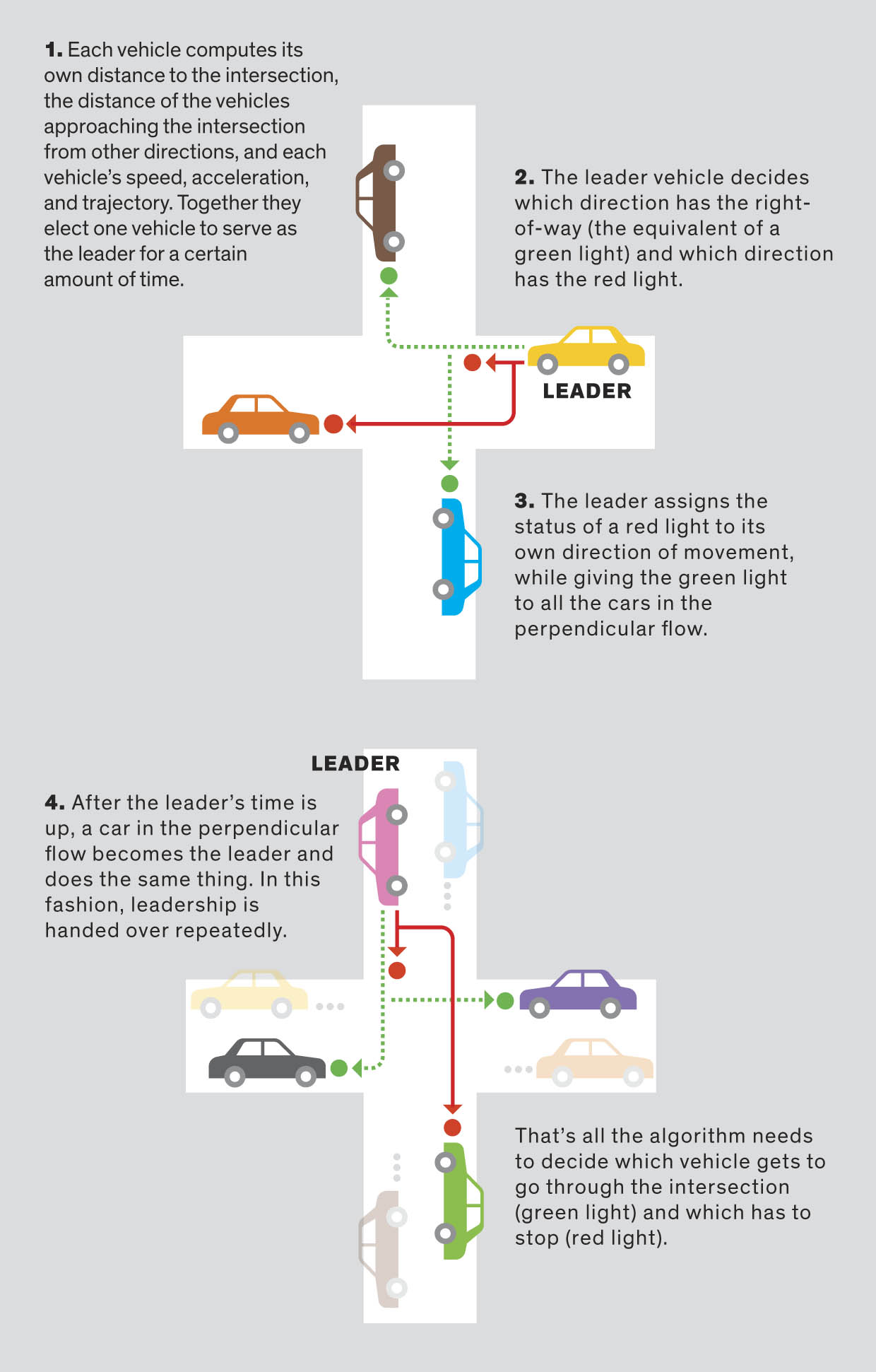 مخطط اختيار القائد
مخطط اختيار القائديتم توفير الوقت لسببين. أولاً ، تقضي VTL على وقت الانتظار عند إشارة المرور الحمراء عندما لا يقود أحد على طول تقاطع الطرق. ثانيًا ، يتحكم VTL في حركة المرور في جميع التقاطعات ، وليس فقط حيث توجد إشارات نشطة. لذلك ، لم يكن على السيارات ، على سبيل المثال ، التوقف عند وجود علامة توقف ، إذا لم تكن هناك سيارات أخرى قريبة.
لقد أظهرت عمليات المحاكاة لدينا فوائد أخرى - ربما أكثر أهمية من توفير الوقت. انخفض عدد الحوادث المرورية بنسبة 70٪ ، وحدث الانخفاض في معظم الأحيان عند التقاطعات وعند علامات التوقف. أيضًا ، من خلال تقليل الوقت المستغرق في الوقوف أمام إشارة المرور ، والتسارع والكبح ، تقلل VTL بشكل كبير من انبعاثات الكربون من السيارات.
ما هو المطلوب لنقل VTL من المختبر إلى العالم الحقيقي؟ تحتاج أولاً إلى البناء في DSRC في السيارات المصنعة. في عام 2014 ، اقترحت الإدارة الوطنية لسلامة المرور على الطرق السريعة في الولايات المتحدة استخدام هذه التكنولوجيا ، لكن إدارة ترامب لم تضع بعد القواعد المناسبة ، ولم يتضح بعد القرار النهائي. لذلك ، سيتردد المصنعون في الولايات المتحدة في دمج أجهزة الإرسال والاستقبال DSRC في الماكينات ، لأنها تزيد من تكلفتها ولن تكون مفيدة إلا إذا كانوا على أجهزة أخرى - مشكلة قياسية في الدجاج والبيض.
حتى يتم تجهيز عدد كاف من الآلات بمثل هذه الأجهزة ، سيظل حجم الإنتاج منخفضًا وستظل التكلفة مرتفعة. في الولايات المتحدة ، بدأت جنرال موتورز فقط في دمج أجهزة الراديو DSRC في السيارات ، وجميعها طرازات كاديلاك باهظة الثمن. ومع ذلك ، فإن الصورة أكثر إيجابية في أوروبا واليابان. قرر العديد من صانعي السيارات الأوروبيين دمج أجهزة الإرسال والاستقبال هذه في السيارات ، وقد بدأ هذا العام في اليابان ، حيث تدعو الحكومة إلى استخدام التكنولوجيا ، وأكدت شركة التصنيع العملاقة تويوتا مرارًا وتكرارًا استعدادها لهذه الخطوة.
ولكن حتى لو لم يحدث شيء مع DSRC ، يمكن بناء الخوارزمية الخاصة بنا على أساس التقنيات اللاسلكية الأخرى ، على سبيل المثال ، 5G أو Wi-Fi.
يثير مفهوم الاختراق غير الكامل لجهاز الإرسال والاستقبال مسألة واحدة من أكبر العقبات التي تحول دون تنفيذ VTL. هل يمكن أن تعمل إذا كانت نسبة صغيرة فقط من السيارات مجهزة بأجهزة إرسال؟ نعم ، إذا قرر المسؤولون تجهيز إشارات المرور الحالية بهذه التقنية.
قد يرغب المسؤولون في القيام بذلك ، إذا كان ذلك الحين فقط ، حتى لا يتخلوا عن البنية التحتية القائمة التي تبلغ قيمتها مئات المليارات من الدولارات. نقدم حلاً قصير الأمد لهذه المشكلة: يمكنك تحديث إشارات المرور الحالية حتى يتمكنوا من التعرف على وجود سيارات مجهزة بنظام DSRC على الطريق ، وبالتالي تعيين المرحلتين الخضراء والحمراء. جمال هذا المخطط هو أن جميع السيارات يمكنها استخدام الطرق والتقاطع ، بغض النظر عن وجود راديو. قد لا يقلل هذا النهج من الوقت بقدر الحل المثالي ، لكنه سيظل أفضل بنسبة 23٪ من أنظمة إدارة حركة المرور الحالية ، وفقًا لعمليات المحاكاة والتجارب الميدانية في بيتسبرغ.
مشكلة أخرى هي كيفية التعامل مع المشاة وراكبي الدراجات. حتى إذا كانت جميع السيارات والشاحنات مجهزة بالقوة من أجهزة إرسال واستقبال ، فلا يمكن للمرء أن يتوقع أن يقوم راكبو الدراجات بإعدادها ونقلها بواسطة المشاة. وبسبب هذا ، سيكون من الصعب على الناس عبور التقاطعات المزدحمة بأمان.
حلنا قصير المدى ، لفترة الوجود المشترك لإشارات المرور و VTL ، هو إعطاء المشاة الفرصة لترتيب طريقهم الرئيسي. في برنامجنا التجريبي في بيتسبرغ ، وضعنا زرًا يضيء ضوءًا أحمر - حقيقي للمشاة ، والظاهري للسيارات - على الجوانب الأربعة للتقاطع. يعمل هذا النظام في كل مرة يتم تنشيطه.
على المدى الطويل ، يمكن حل مشاكل راكبي الدراجات والمشاة بمساعدة إنترنت الأشياء. مع تمديد إنترنت الأشياء ، سيأتي الوقت الذي سيحمل فيه الجميع دائمًا جهازًا يدعم DSRC.
في غضون ذلك ، أظهرنا أنه في ظل الظروف المثالية ، وبدون أي إشارات مادية ، يمكن للسيارات التي تصوت لحق المرور تخصيص جزء من الدورة للمشاة. أثناء فترة التحول ، يضيء ضوء أحمر افتراضي في جميع السيارات في جميع مداخل التقاطع ، ويستمر لفترة كافية للسماح للمشاة بعبور الطريق بأمان. لن يكون هذا الحل الأولي مثاليًا لتدفق كثيف ، لذلك نحن نعمل على طريقة تستخدم كاميرات رخيصة الثمن مثبتة على لوحة عدادات السيارات ، والتي من شأنها أن تساعد على ملاحظة المشاة وإفساح المجال لهم.
إن التكنولوجيا الواعدة لإشارات المرور الافتراضية تجعل نهج عصر السيارات الآلية. نتخيل اليوم أن مثل هذه السيارات ستفعل كل ما يفعله السائقون البشريون: توقف عند إشارات المرور ، وتفسح المجال لإشارات "التخلي عن الطريق" ، وما إلى ذلك. ولكن لماذا تنفيذ الأتمتة بمقدار النصف؟ سيكون من الأفضل بكثير إذا كانت هذه الآلات تتحكم بشكل مستقل تمامًا في الحركة بدون العلامات والإشارات المعتادة. المفتاح لتحقيق ذلك هو V2V والبنية التحتية لهذه الاتصالات.
هذا أمر مهم ، حيث غالبًا ما تفشل السيارات الآلية الحالية في التنقل والقيادة عبر التقاطعات المزدحمة. هذه واحدة من أصعب القضايا التقنية ، ولا تزال تزعج حتى رائدة صناعة Waymo.
في عمليات المحاكاة والتجارب الميدانية التي أجريناها ، وجدنا أن السيارات الآلية المجهزة بـ VTL يمكنها التحكم في تقاطعات التقاطع بدون إشارات وإشارات المرور. إن غياب الحاجة إلى التعرف على هذه الكائنات يبسط إلى حد كبير خوارزميات رؤية الكمبيوتر وأجهزة الكمبيوتر التي تقوم بتشغيلها ، والتي تعتمد عليها الأجهزة الآلية التجريبية اليوم. تمثل هذه العناصر في المجموع ، إلى جانب أجهزة الاستشعار (خاصة lidars) أغلى جزء من السيارات الآلية.
نظرًا لأن بنية برنامج VTL هي وحدات ، سيكون من السهل دمجها في برنامج robomobile. علاوة على ذلك ، فإن VTL قادر على حل معظم ، إن لم يكن كل ، أصعب المشاكل المرتبطة برؤية الكمبيوتر - على سبيل المثال ، إذا كانت الشمس تشرق في الكاميرا ، أو المطر أو الثلج أو العاصفة الرملية أو انحناءات الطريق التي تحجب المنظر. VTL ، بالطبع ، لا تتنافس مع التكنولوجيا الروبوتية. يكملها. وهذا وحده يمكن أن يساعد في تسريع انسحاب السيارات الآلية على الطريق.
لكننا نأمل أنه قبل هذه النقطة بوقت طويل ، سيعمل نظامنا في الآلات التي يسيطر عليها الناس. وقد تمكنا بالفعل في شهر يوليو الماضي من إجراء عرض عام للتكنولوجيا في مدينة الرياض في المملكة العربية السعودية ، بدرجة حرارة 43 درجة مئوية ، مع تركيب الأجهزة على آلات الاختبار. ركب ممثلو الحكومة والأوساط الأكاديمية والشركات - بما في ذلك أوبر - حافلة مرسيدس-بنز وسافروا حول حرم الملك عبد العزيز للعلوم والتكنولوجيا ، وعبروا ثلاثة تقاطعات ، اثنتان منها بدون إشارات مرور. عبرت الحافلة ، بالإضافة إلى شاحنة GMC ، وسيارة الركاب Hyundai SUV و Citroën هذه التقاطعات بكل طريقة ممكنة ، وعمل نظام VTL في كل مرة بنجاح. عندما لم يسمع أحد السائقين إشارة المرور الحمراء على وجه التحديد وحاول عبور التقاطع ، عمل نظامنا الأمني من خلال إظهار وميض أحمر لجميع السيارات الأخرى التي تقترب ، مما حال دون وقوع الحادث.
آمل أن تكون هذه اللحظة نقطة تحول في نظام إدارة النقل لدينا. عملت إشارات المرور في طريقهم. والواقع أنها موجودة منذ أكثر من مائة عام. حان الوقت للمضي قدما.