في هذه المقالة ، سننشئ نموذج تحكم استنادًا إلى المكتبة القياسية للنمذجة الهيكلية (بدون استخدام مكتبة جاهزة من كتل التنظيم المشوشة).
ككائن تحكم ، نموذج لمحرك توربيني غاز من كتاب V.I. Gosteva "منظمات ضبابية في أنظمة التحكم الآلي"
دعونا نجري مقارنة مع منظمي PID و SDA.
بيان المشكلة
الفرق بين محرك التوربين الغازي (محرك التوربينات الغازية) ومحرك التوربينات النفاثة (محرك التوربينات النفاثة) هو أنه في محرك التوربينات الغازية تتم إزالة كل الطاقة من خلال العمود. في المحركات النفاثة ، يتم تحرير الطاقة على شكل تيار نفاث.
تُستخدم محركات التوربينات الغازية (GTE) على نطاق واسع في صناعات الغاز والطيران ، حيث تشكل أساسًا لوحدات ضخ الغاز ومحطات طاقة الطائرات ، في محركات المولدات التوربينية الكهربائية الصناعية لمحطات الطاقة الذروة والمتنقلة ، في محطات الطاقة البحرية والمنشآت الصناعية الأخرى حيث يتطلب تطوير قدرات فردية كبيرة (من 1 إلى 25 ميجاوات) في وحدة واحدة بأقل وزن وأبعاد.
يتم فرض مجموعة من المتطلبات على محركات التوربينات الغازية ذات الصلة بموثوقيتها وكفاءة الطاقة والسلامة والسلامة البيئية أثناء التشغيل. إلى جانب هذه المتطلبات ، فإن متطلبات جودة العابرين المرتبطة بإطلاق الوحدة ، والتغيير الحاد في الحمل (الطاقة) المحددة ذات صلة. في كثير من النواحي ، يكمن استيفاء هذه المتطلبات في نظام التحكم الآلي (ACS) لمحرك التوربين الغازي.
محرك التوربين الغازي النموذجي المستخدم في الصناعة هو محرك توربيني العمود ، وتظهر دائرته في الشكل 1.
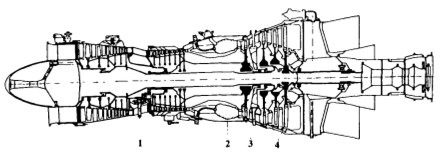
الشكل 1. مخطط لمحرك توربيني غاز صناعي نموذجي:
1- ضاغط 2 - غرفة الاحتراق ؛ 3 - توربين الضاغط ؛ 4 - توربينات كهربائية.
المحرك عبارة عن آلة دوارة يتم فيها ضغط الهواء في الضاغط 1 ، ويتم حرق الوقود الموفر للهواء في غرفة الاحتراق 2 ، ويتم أخذ جزء من الطاقة من الغازات الساخنة في التوربين الضاغط 3 ، ويستهلكها محرك الضاغط 1 ، و 4 غازات في توربينات الطاقة توسيع خلق قوة مأخوذة من المحرك من قبل المستهلك.
في الغالبية العظمى من محركات التوربينات الغازية ، تكون سرعة الدوار كمية محكومة. كعامل تحكم في ACS ، يتم استخدام سرعة الدوار n استهلاك الوقود GT في غرفة الاحتراق. في أوضاع التشغيل المختلفة وتحت الظروف الخارجية المختلفة ، تتغير معلمات المحرك بشكل كبير.
ضع في اعتبارك محرك التوربين الغازي (GTE) ككائن تحكم غير مستقر ، حيث تكون سرعة العضو الدوار متغيرة n ، واستهلاك الوقود G T هو إجراء التحكم. خطي اعتماد اعتماد لحظة التوربين - M T ولحظة الضاغط - M K ، على سرعة الدوار وعدم مراعاة تأثير السعة الحرارية والكتلة للمحرك في وضع تشغيل معين ، اكتب وظيفة نقل المحرك على النحو التالي:
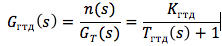
حيث يتم تعريف ثابت الكسب والوقت على النحو التالي:

علاوة على ذلك ، يتم تسجيل إشارات المدخلات والمخرجات في انحرافات نسبية بلا أبعاد من الحالة الثابتة (n = Δn / n 0 ؛ G T = ΔG / G TO ، حيث يتم اختيار القيم الأساسية للمعلمات لوضع تشغيل محرك معين ، على سبيل المثال ، تصنيف أو أقصى). في أوضاع التشغيل المختلفة وتحت الظروف الخارجية المختلفة ، يتغير ثابت الكسب والزمن للمحرك بشكل كبير ، لذلك ، لكل وضع ، من الضروري تحديد قيمه الخاصة لـ K GTD و T GTD .
لاحظ أن وظيفة النقل G لمحرك (محركات) التوربينات الغازية لكائن تحكم غير مستقر ، مثل محرك التوربينات الغازية ، يتم الحصول عليها عن طريق المعامِلات "المجمدة" في حالة تغير بطيء إلى حد ما في معلمات الكائن.
يوضح الشكل 2 مخطط كتلة النظام الكهروميكانيكي التناظري للتحكم تلقائيًا في سرعة الدوار للمحرك.
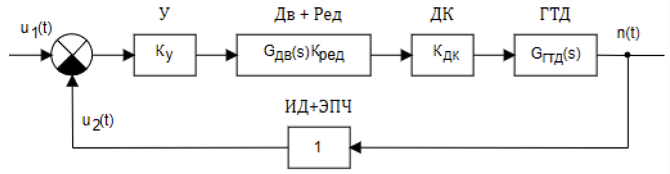
الشكل 2 الشكل 2. كتلة الرسم البياني لمنظومة SAR GTE التناظرية
يتم ضبط تردد الدوران بواسطة الجهد u 1 (t) ويتم تغييره بواسطة مستشعر معرف النبض ، والذي يتم تحديد تردد إشارة الخرج من خلال التعبير:
f = kmn ، حيث n هو عدد دورات المحرك ، m هو عدد أسنان التروس ، k هي نسبة التروس. يتم تحويل الجهد المتناوب المأخوذ من خرج المعرف باستخدام محول التردد الإلكتروني لـ EPC إلى إشارة u2 (t) ، تتناسب قيمتها مع عدد دورات المحرك - n. تتم مقارنة الجهد u2 (t) بالجهد المرجعي وإشارة الخطأ بعد أن يتم توفير مكبر الصوت U إلى المحرك غير المتزامن ثنائي المرحلة Dv ، والذي ينظم صمام الخانق للتيار المستمر من خلال علبة التروس الحمراء ، مما يغير معدل تدفق الوقود الداخل إلى محرك التوربين الغازي. يمكن وصف مستشعر النبض مع محول التردد الإلكتروني بواسطة رابط نسبي مع وظيفة نقل تساوي الوحدة. في هذه الحالة ، يحتوي النظام نفسه على تغذية مرتدة واحدة.
بالنظر إلى الاتصال التسلسلي لمكبر الصوت والمحرك الحثي وصمام الخانق ووحدة التوربينات الغازية ومستشعر التردد مع محول تردد إلكتروني ككائن تحكم مشترك ، واستخدام منظم ضبابي رقمي ، يمكن تقليل مخطط الكتلة بالكامل من الشكل 2 إلى مخطط الكتلة في الشكل 3. علاوة على ذلك ، كل يتم اختزال وظائف نقل الارتباطات إلى دالة نقل مشتركة G 0 (s).
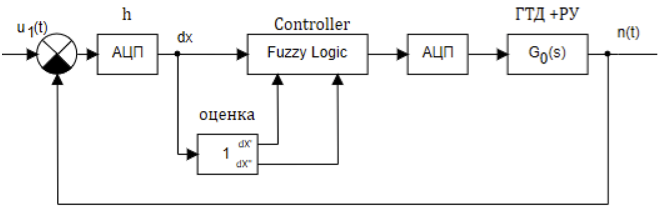
الشكل 3. الشكل 3. هيكل نظام التحكم مع وحدة تحكم غامض.
يمكن كتابة دالة النقل العامة G0 (s) على النحو التالي:
G 0 (s) = G (s) K تحرير TO G (s) = α [s (s + a) (s + b)] -1 ، حيث
α = ab K K EDIT TO K ،
أ = 1 / T DW ،
ب = 1 / T GTE
على سبيل المثال ، نفترض أن تبعيات دالة التحويل على وقت التشغيل تأخذ القيم التالية:
T GTD (t) = 0.9849 - 0.1188 × t + 0.0063 × t 2 - 0.00012 × t 3 ؛
α (t) = 16.5475 - 4.4469 × t + 0.4843 × t 2 - 0.02315 × t 3 + 0.0004 × t 4 ؛
T DW = 0.35 ثانية.
في دراسة نظام التحكم ، نفترض أن الوظيفة المعطاة لتغيير سرعة الدوران لمحرك التوربين الغازي يتم تعيينها بواسطة جهد الدخل u (t)
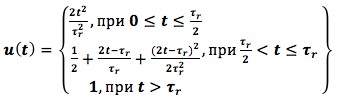
حيث τ r هو وقت تسريع المحرك. نأخذ τ r = 6 ثانية.
إنشاء نموذج ديناميكي
يتم تقديم نموذج مبسط للمحرك في الشكل 4. في هذا النموذج ، نستخدم المعلمات المتغيرة للكتل النمطية التي تتغير أثناء محاكاة الاعتماد المعطى أعلاه.
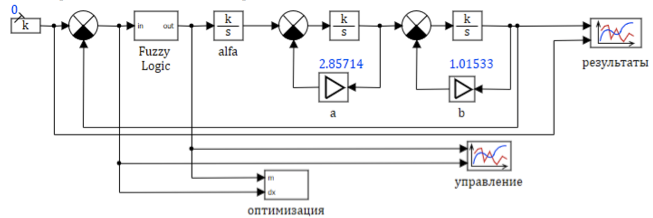
الشكل 4. الشكل التخطيطي لنموذج محرك التوربينات الغازية
يتم حساب معاملات مكبرات الصوت ألفا ، أ ، ب باستخدام لغة برمجة نص البرنامج أدناه:
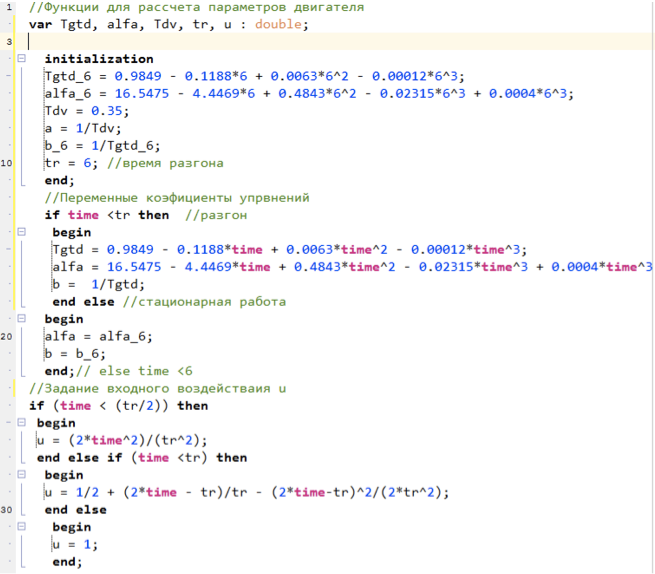
الرقم 5. الشكل النصي لحساب معلمات النموذج.
مقبض تحكم المنطق الضبابي
يأخذ منظم التحكم إدخال عدم التطابق بين القيمة المحددة والقيمة التي تم الحصول عليها من النموذج ، ويجب أن يحسب إجراء التحكم.
دعنا نحاول تجميع وحدة تحكم استنادًا إلى المنطق الضبابي ، باستخدام كتل قياسية فقط من النمذجة الهيكلية ، دون استخدام مكتبة متخصصة.
يمكن العثور على وصف لمبادئ التحكم استنادًا إلى المنطق الضبابي في المقالة السابقة على المحور ، أو في وصف إنشاء مكتبة متخصصة من الكتل هنا (بعناية ، لغة نابية).
تقوم أي وحدة تحكم قائمة على منطق غامض بتنفيذ التسلسل التالي للتحويلات:
- التقسيم التدريجي لمتغيرات الإدخال. يتم استبدال قيمة المتغير بمجموعة من المصطلحات.
- تفعيل استنتاجات قواعد المنطق الضبابي.
- تراكم الاستنتاجات لكل متغير لغوي.
- تجميد متغيرات المخرجات.
للتحكم في المحرك ، سنستخدم ثلاثة متغيرات مستمرة ، يتم حسابها بناءً على إشارة واحدة:
- انحراف
- انحراف مشتق (انحراف معدل التغيير) ؛
- المشتق الثاني للانحراف (تسارع التغيرات في الانحرافات).
يتم عرض مخطط الحساب في الشكل 6:
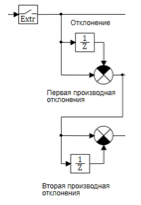
الشكل 6. حسابات الانحرافات المشتقة الأولى والثانية.
تقوم كتلة الاستقراء بحساب كمية الإشارة التي تدخل إلى وحدة التحكم بفترة 0.01 ثانية. يتم احتساب المشتقات الأولى والثانية باستخدام صيغ الفروق:
 حيث:
حيث:
u (t) هو الانحراف الحالي في الوقت t ؛
u (t-Δt) هو الانحراف في الوقت t - ؛t ؛
u '(t) هي القيمة الحالية لمشتق الانحراف في الوقت t ؛
u '(t-Δt) هي قيمة مشتق الانحراف في الوقت t - ؛t ؛
u '' (t) هي القيمة الحالية للمشتق الثاني للانحراف في الوقت t ؛
u '' (t-Δt) هي قيمة المشتق الثاني للانحراف في الوقت t - Δt ؛
Δt هي فترة القياس.
يتم التقسيم حسب Δt في وحدة المقارنة.
نتيجة لهذه الكتلة ، يتم إنشاء ثلاثة متغيرات لغوية: الانحراف ، متغير الانحراف الأول ، متغير الانحراف الثاني.
لحل مشكلة التحكم الغامض ، سنستخدم مصطلحين فقط لكل متغير لغوي.
انحراف - أقل ، أكثر ؛
المشتق الأول للانحراف هو تناقص ، زيادة ؛
المشتق الثاني للانحراف - يتباطأ ، يتسارع.
لحساب قيمة دالة العضوية term لكل مصطلح ، نستخدم دالة خطية مع التشبع. هذه الوظيفة للمصطلح أكثر من 0 عندما تكون قيمة الإدخال الحد الأدنى و 1 عندما تكون قيمة الإدخال هي الحد الأقصى. بالنسبة لمصطلح أقل ، تأخذ هذه الدالة القيمة 1 عندما يكون المتغير مساويًا للحد الأدنى ، و 0 عندما يكون المتغير هو الحد الأقصى. (انظر الشكل 7)

الشكل 7. وظائف العضوية للمصطلحات أقل وأكثر.
وهكذا ، لكل من متغيرات المدخلات الثلاثة (الانحراف ، المشتق الأول للانحراف ، المشتق الثاني للانحراف) ، هناك مصطلحان أكثر فأكثر ، قيمة وظائف العضوية μ i التي تختلف خطياً من 0 ، إلى 1 اعتمادًا على قيمة الإدخال متغير.
كمتغير لغوي للمخرجات ، نستخدم تأثير المخرجات ، والذي يحتوي أيضًا على فصلين فقط لتقليل الزيادة.
من الرسم التخطيطي النموذجي للشكل. 4 من الواضح أنه إذا كان الانحراف أقل من 0 ، فإن القيمة أكبر من القيمة المحددة ويجب تقليلها. إذا كان الانحراف أكبر من 0 ، فستكون الوظيفة أقل من الوظيفة المحددة ويجب زيادتها.
ستبدو القواعد المنطقية للمصطلحين كما يلي:
- إذا كان أقل ويقل ويبطئ => ينقص.
- إذا كان يزيد ويزيد ويسرع => يزيد.
لتنشيط قواعد الاستدلال الضبابي ، نستخدم الحد الأدنى من الوظيفة للمشغل والعامل. يتم حساب قيمة دالات العضوية لشروط دالة الإخراج بالصيغ:
μ
نقص = MIN (μ
أقل μ
ينخفض μ
يبطئ )
μ
زيادة = MIN (μ
المزيد ، μ
زيادة ، μ
تسارع )
لضمان تحويل المصطلحات إلى قيم تأثير محددة (تراكم وإزالة التحلل) ، نستخدم خوارزمية Tsukamoto كمركز لجاذبية النقاط.
 أين
أين
u c هي الدالة الناتجة ؛
u i هي قيمة الدالة للمصطلح i ؛
μ i هي قيمة دالة العضوية لشروط الوظيفة.
في حالتنا ، يتم حساب الدالة الناتجة لفصلين من خلال الصيغة:

يتم عرض المخطط العام لخوارزمية الاستدلال الضبابي في الشكل 8:
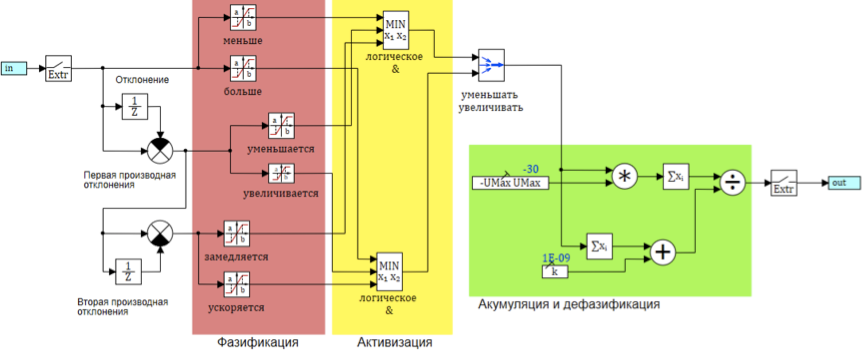
الشكل 8. مخطط خوارزمية الاستدلال الضبابي
لكي تعمل هذه الخوارزمية ، يجب علينا تعيين القيم الدنيا والقصوى لـ 6 فصول لثلاثة متغيرات لغوية (الانحراف ، المشتق الأول للانحراف ، المشتق الثاني للانحراف). لتقليل الحسابات ، نفترض أن الانحراف متماثل مع الصفر. ثم يكفي لنا أن نجد 3 قيم مطلقة ، واحدة لكل متغير.
deltMax - أقصى انحراف. يضبط قيم المصطلحات أقل ، أكثر (-deltMax ، deltaMax) ؛
divMax هو المشتق الأقصى للانحراف. يضبط قيم المصطلحات ينقص ويزيد (-divMax ، divMax) ؛
div2Max هي المشتق الثاني الأقصى. لتعيين قيم المصطلحات يتباطأ ، يتسارع (-div2Max ، div2Max).
يتم تحديد الحد الأقصى والأدنى لتأثير الأومين والأومكس من خلال ميزات التصميم وفي هذا المثال تؤخذ مساوية لـ +30 و -30.
تعديل المنظم عن طريق التحسين.
لتحديد المعاملات ، نستخدم نفس نظام التحسين الذي استخدمناه في التجارب السابقة مع المنطق الضبابي.
كمعايير للتحسين ، نأخذ الانحراف المعياري الذي لا يزيد عن 0.001 وعدد المفاتيح في وحدة التحكم لا يزيد عن 25. للتبديل ، نتخذ تغييرًا في علامة إجراء التحكم.
يتم عرض دائرة كتلة إعدادات وحدة التحكم في الشكل. 9.
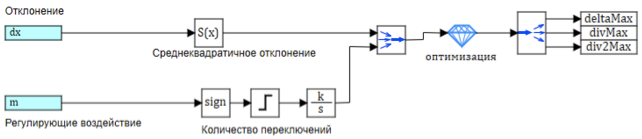
الشكل 9. تكوين معلمات الإخراج غامض.
نتيجة لعملية البلوك ، تم الحصول على المعلمات التالية
deltMax = 0.00746 ؛
divMax = 0.2657 ؛
div2Max = 25.13 ؛
يتم عرض نتائج المرحلة الانتقالية في الشكل 10.
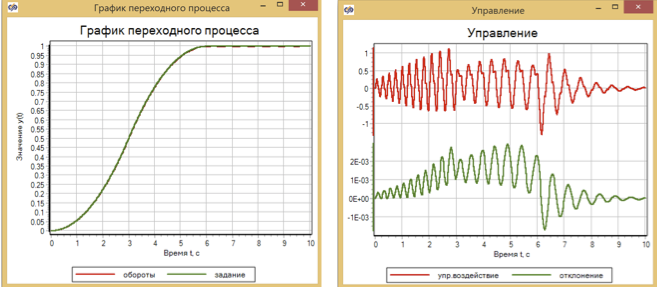
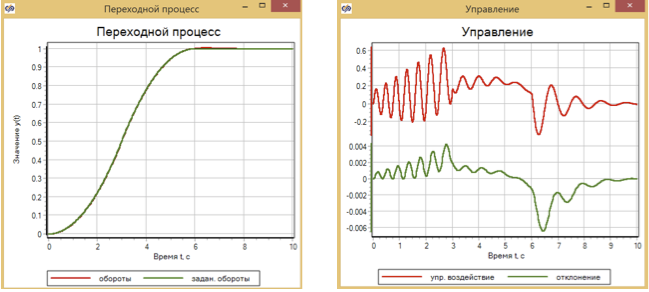
الشكل 10. التحكم العابر والحركي باستخدام منطق غامض.
أقصى انحراف للثورات عن المجموعة بعد التحسين كان 2.5 × 10 -3 . وهو ، من حيث المبدأ ، ليس سيئًا ، ولكن في كتاب V.I. كانت انحرافات الضيف في النموذج بعد الإعدادات أصغر بمرتين من الحجم: الحد الأقصى كان 5 × 10 -5 .
للمقارنة ، نقدم نتائج عملية تحكم PID الشكل 11 وقواعد المرور الشكل 12 لنفس طراز المحرك المبسط. كما تم اختيار معلمات هذه الجهات التنظيمية بطريقة التحسين.
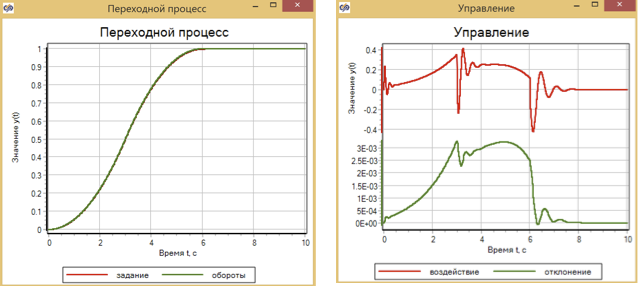
ونتيجة لذلك ، يتم الحصول على انحراف أكبر لوحدة التحكم PID مقارنة بوحدة التحكم القائمة على المنطق الضبابي - حوالي 6 × 10 -3 ، وبالنسبة لوحدة التحكم في حركة المرور التي تستخدم المشتق الثاني ، يكون الانحراف حوالي 3 × 10 -3 (انظر 13). علاوة على ذلك ، على جميع الرسوم البيانية ، يمكن ملاحظة أنه عندما يتغير التأثير المحدد (التغييرات في الأقسام 3 ثوانٍ ، 6 ثوانٍ) ، تتغير جودة التنظيم.
الشكل 11. التحكم العابر والمحرك باستخدام جهاز تحكم PID.
الشكل 12. عملية عابرة والتحكم في المحرك بمساعدة مراقب الحركة.
لبدء تشغيل المحرك ، يتم استخدام وظيفة الانتقال في شكل تغيير سلس في السرعة. كما قمنا بضبط المنظمين بطريقة التحسين للتحكم الأمثل وفقًا لهذا القانون. دعونا نحاول تطبيق تأثير تدريجي ونرى كيف يمكن للمنظمين ، الذين تم تحسينهم في البداية لعملية انتقال سلسة ، التأقلم.
ونتيجة لذلك ، نستخدم خطوة من 0 إلى 1 في 3 ثوانٍ من العملية.
نتائج التجربة معروضة في الأشكال 13-15.
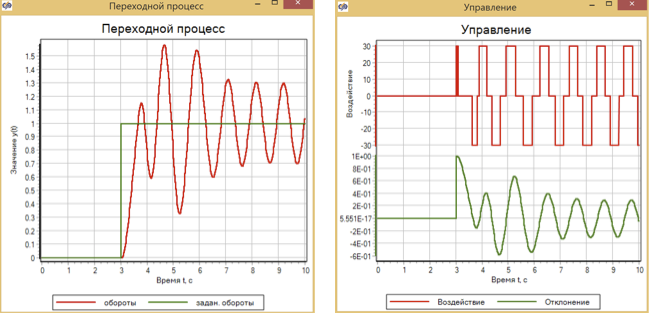
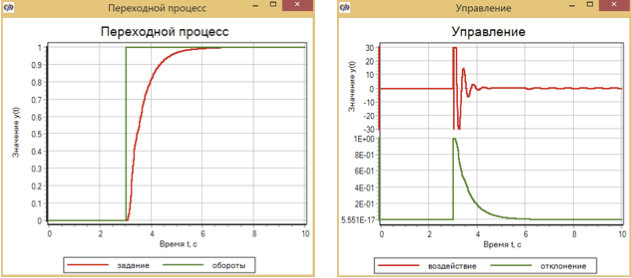
الشكل 13. عملية ومراقبة عابرة مع إجراء تحكم تدريجي مع وحدة تحكم منطق غامض.
يمكن ملاحظة أن المنظم الذي يتم ضبطه لتسريع المحرك بسلاسة لا يتكيف مع التحكم أثناء إجراء تدريجي ، ويدخل النظام في وضع التذبذب التلقائي.
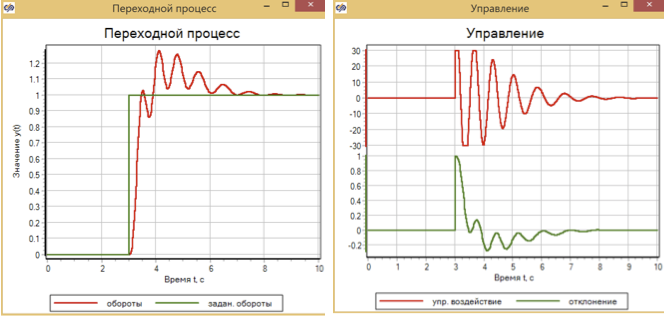
الشكل 14. عملية عابرة والتحكم مع إجراءات التحكم خطوة مع وحدة تحكم PID.
توفر وحدة تحكم PID المضبوطة لعملية سلسة ، مع تأثير تدريجي ، انتقالًا إلى وقت محدد مسبقًا ، ولكن في نفس الوقت هناك تجاوز 30 ٪ وعملية تذبذب في غضون 4 ثوانٍ.
يوفر مراقب الحركة ، الذي تم تكوينه للتنظيم السلس ، مع تأثير تدريجي انتقالًا سلسًا دون تجاوز (الشكل 14)
الشكل 15. عملية الانتقال والتحكم مع إجراء تحكم متدرج مع وحدة تحكم حركة المرور.
الاستنتاجات
أظهرت هذه التجارب العددية أن جهاز التحكم القائم على المنطق الضبابي يوفر تحكمًا أكثر دقة لثورات نموذج المحرك البسيط مع تغيير سلس في القيمة المحددة من PID و SDA.
ومع ذلك ، فإن مثل هذا الإعداد ، كما اتضح ، لا يضمن استقرار المنظم تحت تصرف تدريجي.
في الوقت نفسه ، بالنسبة لنموذج مبسط للمحرك ، تبين أن وحدة التحكم القائمة على المنطق الضبابي في حالة إجراء تدريجي تكون أسوأ من PID أو وحدة التحكم في حركة المرور.
رابط إلى الأرشيف بالمشاريع من المقال للدراسة الذاتية