نستمر في إتقان لغة جوليا الشابة والواعدة. لكن بالنسبة للمبتدئين ، نحتاج إلى الإمكانية الضيقة جدًا للتطبيق - لحل المشكلات الفيزيائية النموذجية. هذا هو التكتيك الأكثر ملاءمة لإتقان الأداة: من أجل الحصول على المساعدة ، سنقوم بحل المشاكل الملحة ، وزيادة التعقيد تدريجيًا وإيجاد طرق لجعل حياتنا أسهل. باختصار ، سنقوم بحل الاختلافات وبناء الرسوم البيانية.
للبدء ، قم بتنزيل حزمة رسومات Gadfly ، وعلى الفور النسخة الكاملة من المطور ، بحيث تعمل بشكل جيد مع Julia 1.0.1. نحن نقود في مفكرة REPL أو JUNO أو Jupyter:
using Pkg pkg"add Compose#master" pkg"add Gadfly#master"
ليس الخيار الأكثر ملاءمة ، ولكن أثناء انتظار تحديث PlotlyJS ، يمكنك المحاولة من أجل المقارنة.
تحتاج أيضًا إلى أداة قوية لحل المعادلات التفاضلية
]add DifferentialEquations #
هذه هي الحزمة الأكثر شمولاً والمدعومة التي توفر الكثير من الطرق لحلها. انتقل الآن إلى صور المرحلة.
غالبًا ما تكون حلول المعادلات التفاضلية العادية أكثر ملاءمة للتصوير بشكل غير عادي y1(t)،...،yL(t) ، وفي مساحة الطور على طول المحاور التي يتم رسم قيم كل من الوظائف التي تم العثور عليها. علاوة على ذلك ، يتم تضمين الحجة t في الرسوم البيانية فقط بشكل بارز. في حالة اثنين من ODEs ، مثل هذا الرسم البياني - صورة طور النظام - هو منحنى على مستوى الطور وبالتالي فهو واضح بشكل خاص.
مذبذب
ديناميكيات المذبذب التوافقي gamma يوصف نظام المعادلات التالية:
dotx=y doty=− omega2x+ gammay
وبغض النظر عن الشروط الأولية (x0، y0) ، فإنها تأتي إلى حالة توازن ونقطة (0،0) بزاوية انحراف صفرية وسرعة صفر.
في gamma=0 يأخذ الحل الشكل المميز لمذبذب كلاسيكي.
using DifferentialEquations, Gadfly # - function garmosc(ω = pi, γ = 0, x0 = 0.1, y0 = 0.1) A = [0 1 -ω^2 γ] syst(u,p,t) = A * u # ODE system u0 = [x0, y0] # start cond-ns tspan = (0.0, 4pi) # time period prob = ODEProblem(syst, u0, tspan) # problem to solve sol = solve(prob, RK4(),reltol=1e-6, timeseries_steps = 4) N = length(sol.u) J = length(sol.u[1]) U = zeros(N, J) for i in 1:N, j in 1:J U[i,j] = sol.u[i][j] # end U end
دعونا نحلل الرمز. تقبل الدالة قيم معلمة التردد والتوهين ، فضلاً عن الشروط الأولية. تحدد الدالة syst () المتداخلة النظام. من أجل أن يتحول ، استخدموا ضرب المصفوفة بسطر واحد. يتم تكوين وظيفة الحل () ، التي تأخذ عددًا كبيرًا من المعلمات ، بمرونة جدًا لحل المشكلة ، ولكننا أشرنا فقط إلى طريقة الحل - Runge-Kutta 4 ( هناك العديد من الميزات الأخرى ) ، والخطأ النسبي ، وحقيقة أنه لا يجب حفظ جميع النقاط ، ولكن كل ربع فقط . يتم تخزين مصفوفة الاستجابة في sol المتغير ، علاوة على ذلك ، sol.t يحتوي على متجه مرات ، و sol.u يحل النظام في هذه الأوقات. كل هذا يتم رسمه بهدوء في المؤامرات ، وبالنسبة لـ Gadfly ، يجب عليك إكمال الإجابة في مصفوفة أكثر ملاءمة. نحن لا نحتاج إلى أوقات ، لذا نعيد الحلول فقط.
دعونا نبني صورة طورية:
Ans0 = garmosc() plot(x = Ans0[:,1], y = Ans0[:,2])

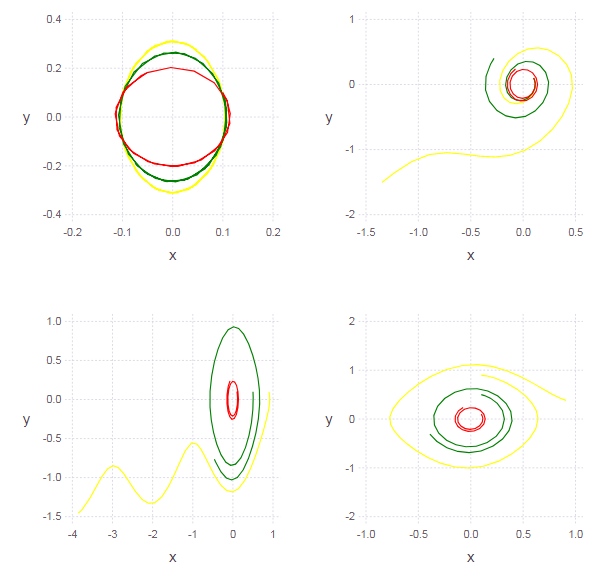
من بين الوظائف عالية الترتيب ، يعتبر broadcast(f, [1, 2, 3]) ملحوظًا بشكل خاص بالنسبة لنا ، والذي يستبدل قيم الصفيف [1 ، 2 ، 3] بالتناوب في الدالة f . تسجيل قصير f.([1, 2, 3]) . يفيد ذلك في تغيير التردد ومعلمة التوهين والإحداثيات الأولية والسرعة الأولية.
مخفي تحت المفسد L = Array{Any}(undef, 3)# ( ) clr = ["red" "green" "yellow"] function ploter(Answ) for i = 1:3 L[i] = layer(x = Answ[i][:,1], y = Answ[i][:,2], Geom.path, Theme(default_color=clr[i]) ) end p = plot(L[1], L[2], L[3]) end Ans1 = garmosc.( [pi 2pi 3pi] )# p1 = ploter(Ans1) Ans2 = garmosc.( pi, [0.1 0.3 0.5] )# p2 = ploter(Ans2) Ans3 = garmosc.( pi, 0.1, [0.2 0.5 0.8] ) p3 = ploter(Ans3) Ans4 = garmosc.( pi, 0.1, 0.1, [0.2 0.5 0.8] ) p4 = ploter(Ans4) set_default_plot_size(16cm, 16cm) vstack( hstack(p1,p2), hstack(p3,p4) ) #

الآن لا نعتبر التذبذبات الصغيرة ، ولكن التذبذبات في السعة التعسفية:
dotx=y doty=−sin( omegax)+ gammay
مخطط الطور للحل ليس قطعًا بيضاويًا (مما يشير إلى عدم خطية المذبذب). كلما قل اختيارنا لسعة التذبذبات (أي الشروط الأولية) ، كلما ظهر انخفاض الخطية (لذلك ، يمكن اعتبار التذبذبات الصغيرة للبندول متناسقة).
مخفي تحت المفسد function ungarmosc(ω = pi, γ = 0, x0 = 0.1, y0 = 0.1) function syst(du,u,p,t) du[1] = u[2] du[2] = -sin( ω*u[1] )+γ*u[2] end u0 = [x0, y0] # start cond-ns tspan = (0.0, 2pi) # time period prob = ODEProblem(syst, u0, tspan) # problem to solve sol = solve(prob, RK4(),reltol=1e-6, timeseries_steps = 4) N = length(sol.u) J = length(sol.u[1]) U = zeros(N, J) for i in 1:N, j in 1:J U[i,j] = sol.u[i][j] # end U end Ans1 = ungarmosc.( [pi 2pi 3pi] ) p1 = ploter(Ans1) Ans2 = ungarmosc.( pi, [0.1 0.4 0.7] ) p2 = ploter(Ans2) Ans3 = ungarmosc.( pi, 0.1, [0.1 0.5 0.9] ) p3 = ploter(Ans3) Ans4 = ungarmosc.( pi, 0.1, 0.1, [0.1 0.5 0.9] ) p4 = ploter(Ans4) vstack( hstack(p1,p2), hstack(p3,p4) )
بروكسل
يصف هذا النموذج تفاعلًا كيميائيًا تحفيزيًا معينًا يلعب فيه الانتشار دورًا. تم اقتراح النموذج في عام 1968 من قبل Lefebvre و Prigozhin.
dotu1=−( mu+1)u1+u21u2+1 dotu2= muu1−u21u2
وظائف غير معروفة u1(t)، ،u2(t) تعكس ديناميات تركيز المنتجات الوسيطة للتفاعل الكيميائي. معلمة النموذج mu إن التركيز الأولي للمحفز (المادة الثالثة) منطقي.
بمزيد من التفصيل ، يمكن ملاحظة تطور صورة الطور للمحاور عن طريق إجراء حسابات بمعلمات مختلفة mu . مع زيادتها ، ستتحول العقدة أولاً تدريجيًا إلى نقطة ذات إحداثيات (1 ، mu ) حتى تصل إلى قيمة التشعب mu = 2. عند هذه النقطة ، هناك إعادة هيكلة نوعية للصورة ، يتم التعبير عنها في ولادة دورة الحد. مع زيادة أخرى mu يحدث تغيير كمي فقط في معلمات هذه الدورة.
مخفي تحت المفسد function brusselator(μ = 0.1, u0 = [0.1; 0.1]) function syst(du,u,p,t) du[1] = -(μ+1)*u[1] + u[1]*u[1]*u[2] + 1 du[2] = μ*u[1] - u[1]*u[1]*u[2] end tspan = (0.0, 10) # time period prob = ODEProblem(syst, u0, tspan) # problem to solve sol = solve(prob, RK4(),reltol=1e-6, timeseries_steps = 1) N = length(sol.u) J = length(sol.u[1]) U = zeros(N, J) for i in 1:N, j in 1:J U[i,j] = sol.u[i][j] # end U end L = Array{Any}(undef, 10) function ploter(Answ) for i = 1:length(Answ) L[i] = layer(x = Answ[i][:,1], y = Answ[i][:,2], Geom.path ) end plot(L[1], L[2], L[3], L[4], L[5], L[6], L[7], L[8], L[9], L[10]) end SC = [ [0 0.5], [0 1.5], [2.5 0], [1.5 0], [0.5 1], [1 0], [1 1], [1.5 2], [0.1 0.1], [0.5 0.2] ] Ans1 = brusselator.( 0.1, SC ) Ans2 = brusselator.( 0.8, SC ) Ans3 = brusselator.( 1.6, SC ) Ans4 = brusselator.( 2.5, SC ) p1 = ploter(Ans1) p2 = ploter(Ans2) p3 = ploter(Ans3) p4 = ploter(Ans4) set_default_plot_size(16cm, 16cm) vstack( hstack(p1,p2), hstack(p3,p4) )

يكفي اليوم. في المرة القادمة ، سنحاول معرفة كيفية استخدام حزمة رسومات أخرى للمهام الجديدة ، بينما نكتب في نفس الوقت بناء جملة جوليا. في عملية حل المشكلات ، يتم تتبعك ببطء ، وليس أن الإيجابيات والسلبيات مباشرة ... بدلاً من ذلك ، وسائل الراحة والإزعاج - يجب تخصيص محادثة منفصلة لذلك. وبالطبع ، أود أن أرى شيئًا أكثر خطورة على هبري من ألعابي ذات الوظائف - لذلك ، أحث علماء القانون على إخبار المزيد عن المشاريع الأكثر جدية ، وهذا سيساعد الكثيرين ، وعلى وجه الخصوص ، في تعلم هذه اللغة الرائعة.