من المستحيل تخيل عالم الخيال العلمي للمستقبل بدون الروبوتات. سواء كان ذلك في androids من عالم Alien أو آلات الروبوت مجسم من Transformers أو كلب روبوتي يدعى Axel أو قاتل روبوت ضخم ED-209 في فيلم Robocop ، والذي بدا وكأنه دجاجة للعديد من المشاهدين. ولكن ما المشترك بينهما؟ بالإضافة إلى القوة والسرعة والتحمل وغيرها ، إذا جاز التعبير ، الميزات المادية؟ المخابرات. وما هو الذكاء؟ القدرة على التفكير وتحليل البيانات واتخاذ القرارات ، إذا تحدثنا بشكل مبالغ فيه باختصار. اليوم سنتعرف على أول روبوت معياري في العالم ، قادر على تحليل الوضع في الميدان ، وإعادة بنائه لتحقيق المهمة. كيف استطاع العلماء تعليم الروبوت أن يفكروا بسرعة ويتخذوا القرارات الصحيحة ، وكيف يعمل هذا الروبوت وما مدى نجاحه؟ تصف مجموعة البحث كل هذا في تقريرها ، الذي سنغرق فيه. دعنا نذهب.
أساس التأسيسللبدء ، يجدر الحديث قليلاً عن شكل الروبوت المختبر. إنه ليس عاديًا تمامًا ، حيث تم الكشف عن ميزات التصميم الخاصة به بالاسم نفسه - روبوت معياري قابل لإعادة التشكيل الذاتي (MSRR). إن كلمة "روبوت" واضحة لنا جميعا. دعونا نكتشف ما يعنيه الأولين. وحدات: يتكون هذا الروبوت من وحدات ، والتي هي في الأساس روبوتات مستقلة. من خلال الجمع بين هذه الوحدات ، يمكنك الحصول على تصميم بأي تعقيد (عمليا) ، اعتمادًا على المهمة المطلوبة. أي أن الروبوتات الفردية الصغيرة (الوحدات) يمكنها بسهولة أداء بعض المهام بمفردها ، وللقيام بمهام أكثر تعقيدًا تجتمع معها ، مثل الحراس الأقوياء مجتمعين في Megazord (سيفهم أطفال التسعينات نوع الهراء الذي كتبته للتو :) )
 ظهور روبوت معياري.
ظهور روبوت معياري.يلاحظ الباحثون أنه تم إجراء دراسات سابقة في مجال الروبوتات المعيارية التي يمكن أن تحل بعض المشاكل. ومع ذلك ، يمكن لهذه الروبوتات سابقًا أن تحل إما المهام البسيطة أو المهام المعقدة ، والتي تم بالفعل برمجة الحلول عليها من قبل البشر. في الواقع ، لم يتخذوا قرارات من تلقاء أنفسهم ، وتقييم الوضع والتعقيد الضروري لإكمال المهمة.
أجرى العلماء سلسلة من الاختبارات ، كان كل منها مختلفًا عن الاختبار السابق. من ناحية أخرى ، كان على الروبوت أن يقوم بمهمة محددة (والتي بعد ذلك بقليل) عن طريق إعادة البناء في ظل البيئة الجديدة. وبطبيعة الحال ، لم يطلب منه أحد معطف جلد الغنم المزدوج ، ولكن النتائج لا تزال تذهل العلماء. والآن سنتعرف عليهم.
اختبار "Megazord"تم إجراء اختبارات الروبوت على ثلاث مراحل ، لكل منها مهمته الخاصة. أجريت الاختبارات في غرفة حيث تم تشكيل "بيئة العمل" للروبوت بمساعدة الصناديق ، والتي تم تغييرها من قبل الباحثين في كل مرحلة. تخيل متاهة تتغير في كل مرة تدخل فيها. لم يتم برمجة الروبوت في الأصل لكل بيئة جديدة ، بالنسبة له كانت بيئة جديدة تمامًا. الشيء الوحيد الذي عرفه الروبوت بالتأكيد هو قدراتهم. بادئ ذي بدء ، هذا هو تقييم البيئة ، ثم الروبوت الذي تم اختياره من المكتبة لقدراته تلك التي تساهم بشكل فعال في المهمة.
كما قلت سابقًا ، لم يكن هناك سوى ثلاث مراحل اختبار ذات مهام وبيئات مختلفة:
- استكشف البيئة ، واعثر على جميع الأشياء الوردية / الخضراء والعلامة الزرقاء ، وانقل الكائنات إلى نقطة إعادة التعيين ؛
- استكشاف البيئة ، والعثور على صندوق البريد ، ووضع اللوح في المربع ؛
- استكشاف البيئة ، والعثور على العبوة ، ووضع ختم عليها.
تبدو المهام بسيطة للغاية ، ولكن هذا بالنسبة لنا. دخلنا الغرفة ، ونظرنا حولنا ، ووجدنا كل ما نحتاجه وجاهزون. لكن لا تقارن أحد أكثر أجهزة الكمبيوتر تعقيدًا في العالم (دماغنا) والروبوت الصغير.
في المرحلة الأولى ، تم تكليف الروبوت بأخذ شيئين - "قمامة معدنية" ، معلمة باللون الوردي والأخضر ، وتسليمها إلى نقطة التفريغ من أجل "إعادة التدوير". تم تمييز نقطة إعادة الضبط بمربع أزرق على الحائط.
تم تعيين المهمة ، وبيئة العمل جاهزة ، والروبوت قيد التشغيل. أول شيء يفعله هو مسح الفضاء وإنشاء خريطة ثلاثية الأبعاد ، والتي سيتم بموجبها توجيهه في المستقبل.
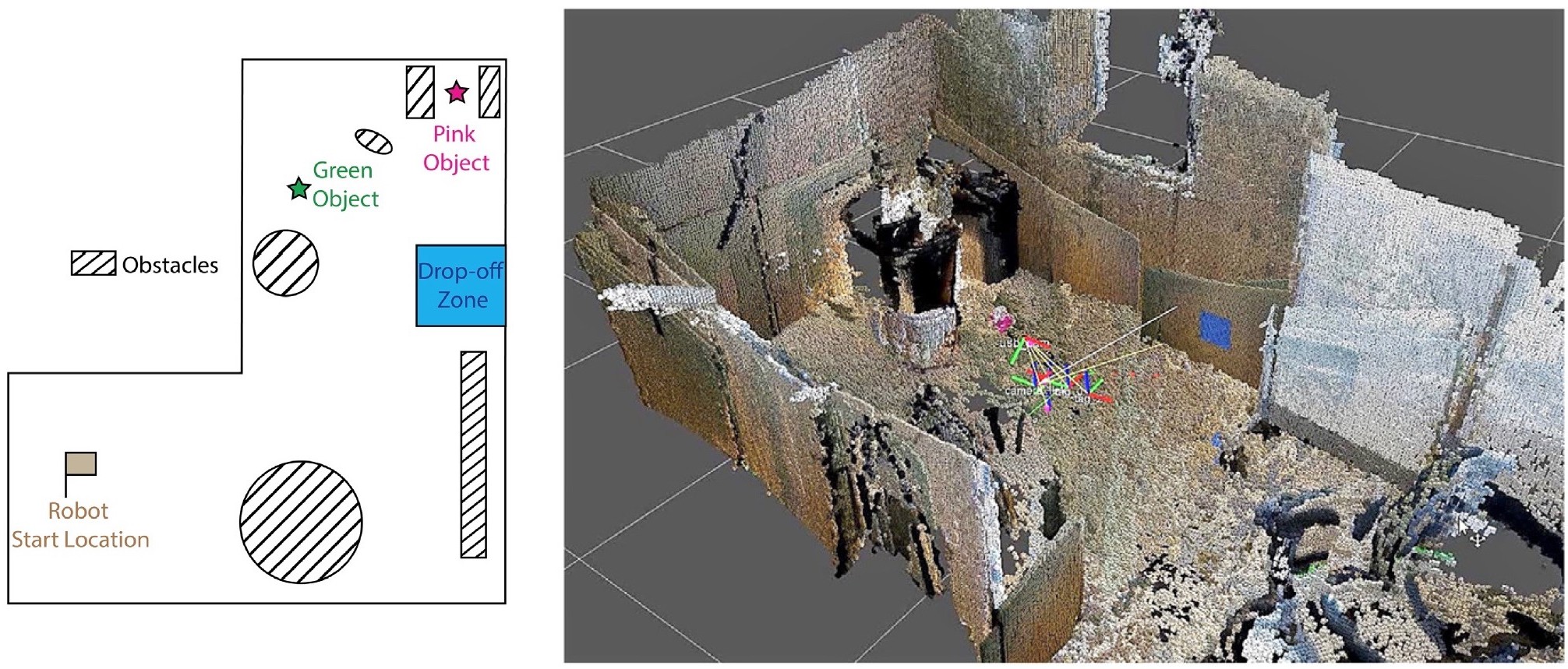 مخطط منطقة الاختبار للمرحلة الأولى (يسار) وخريطة ثلاثية الأبعاد لبيئة العمل للروبوت المعياري (يمين).
مخطط منطقة الاختبار للمرحلة الأولى (يسار) وخريطة ثلاثية الأبعاد لبيئة العمل للروبوت المعياري (يمين).ضع في اعتبارك إجراءات الروبوت كمثال للمرحلة الأولى من الاختبار ، والتي ترى تفاصيلها في الرسم البياني والصورة أعلاه.
العلامة الخضراء على الرسم البياني هي موقع علبة صودا عادية ، لا يُمنع الوصول إليها. العلامة الوردية عبارة عن ملف من الأسلاك يقع في مساحة ضيقة بين صندوقين للنفايات. أيضا ، تم العثور على عقبات مختلفة في جميع أنحاء المنطقة.
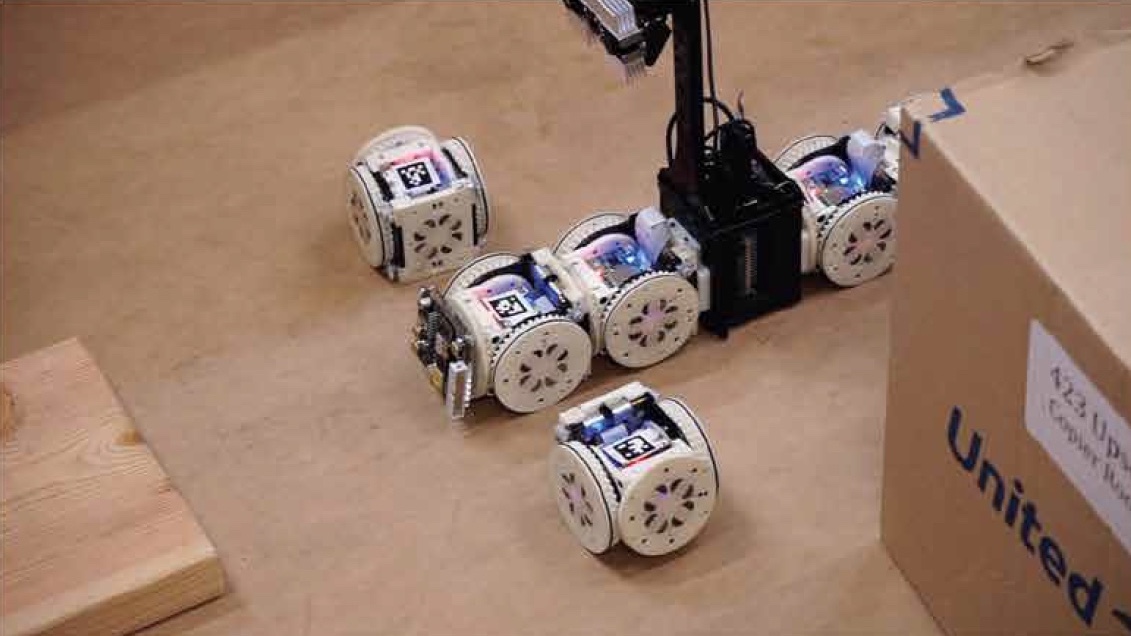
أولاً ، اختار الروبوت الشكل الأنسب للحركة - "السيارة". بعد أن اكتشف جسمًا ورديًا ، حلل الروبوت موقفه وخلص إلى أن مثل هذا النموذج لن يمنحه الفرصة للحصول على الكائن. لذلك ، أعيد بناؤه على شكل "جذع" وسحب شيء. بالعودة إلى شكل الآلة ، أخذ الروبوت الكائن وحمله إلى نقطة التفريغ ، وهو الوضع الذي يعرفه بالفعل بفضل المسح الضوئي وإنشاء خريطة.
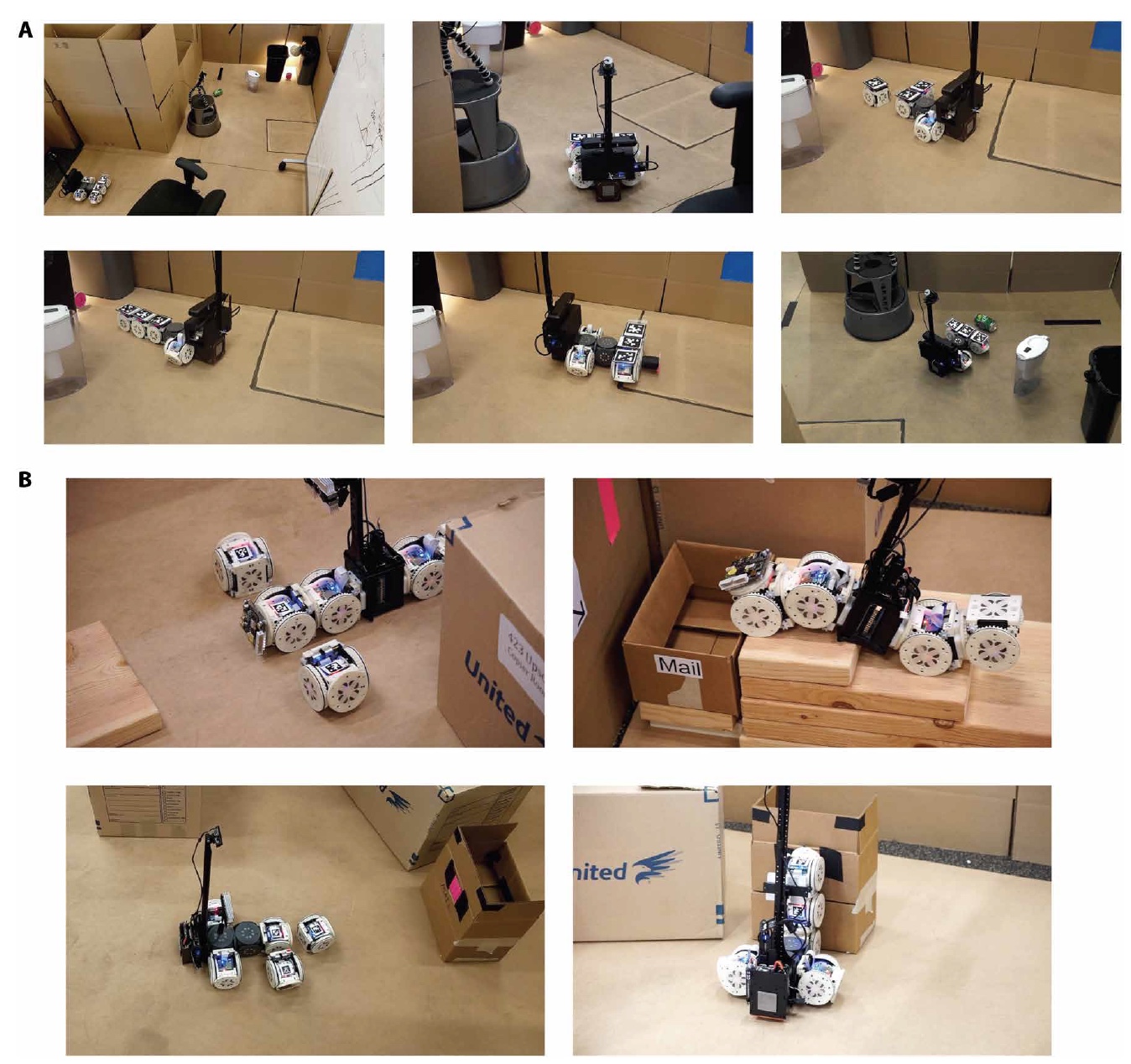 أ - المرحلة الأولى (من اليسار إلى اليمين: عرض لبيئة العمل ، مسح البيئة ، إعادة تشكيل الروبوت ، التقاط كائن وردي ، تحريك كائن ، التقاط كائن أخضر) ؛ ب - المرحلة الثانية (صورتان علويتان) والمرحلة الثالثة (صورتان سفليتان).
أ - المرحلة الأولى (من اليسار إلى اليمين: عرض لبيئة العمل ، مسح البيئة ، إعادة تشكيل الروبوت ، التقاط كائن وردي ، تحريك كائن ، التقاط كائن أخضر) ؛ ب - المرحلة الثانية (صورتان علويتان) والمرحلة الثالثة (صورتان سفليتان).في المرحلة الثانية ، كانت البيئة مختلفة بالفعل ، لأن التكتيكات السابقة للروبوت لم تعد فعالة. في الصور أعلاه ، نرى أن الروبوت أصبح في شكل "ثعبان" لتسلق السلالم وترك الكائن في صندوق البريد. أي أن الروبوت ، الذي يقيم الوضع ، أدرك أن وجود وحدات معينة لن يكون غير ضروري فحسب ، بل يمكن أن يؤدي أيضًا إلى الفشل ، وبالتالي فصلها.
في المرحلة الثالثة ، واجه الروبوت مشاكل في العثور على الهدف (ضع علامة على مكان وضع طابع البريد) ، ولكن بعد بضع دقائق تمكن من اكتشافه. تقع العلامة على ارتفاع 25 سم من الأرض ، لأن التكوين الأولي للروبوت ("الآلة") غير فعال. أعيد بناء الروبوت في شكل رأسي وتمسك بختم.
وصفة لغز روبوتكما فهمنا بالفعل ، تتكون Megazord الخاصة بنا من عدة وحدات روبوت صغيرة قادرة على أداء حركات مختلفة بمفردها ، مما يمنح الروبوت الكبير ميزة التنقل ، وبالطبع القدرة على إعادة التكوين.
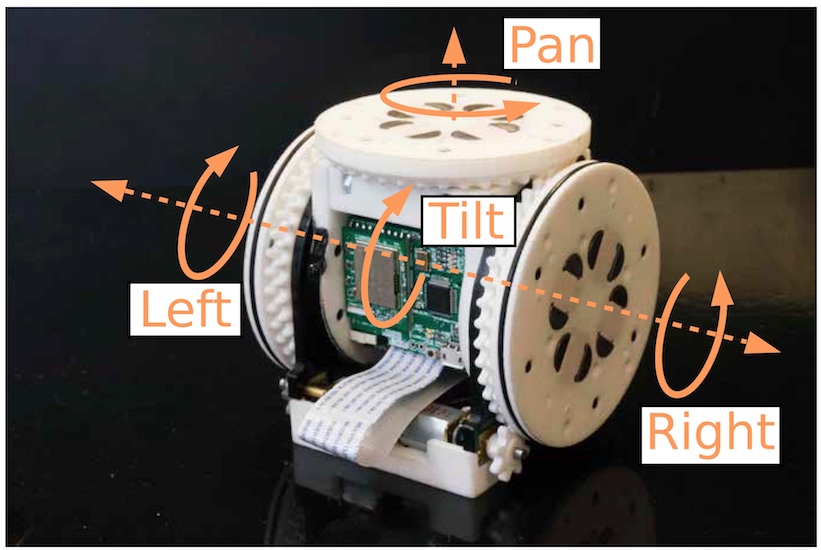 مظهر الوحدة. توضح الأسهم كيف يمكن للوحدة تغيير موضعها (المنعطفات الأفقية والرأسية والإمالة).
مظهر الوحدة. توضح الأسهم كيف يمكن للوحدة تغيير موضعها (المنعطفات الأفقية والرأسية والإمالة).تم تجهيز كل وحدة (كل وجه من المكعب 80 مم) بمغناطيسات كهربائية دائمة تسمح للوحدات بالاتصال ببعضها البعض بغض النظر عن جانب الاتصال. أيضًا ، يسمح لك هذا المغناطيس بإرفاق أشياء مغناطيسية (على سبيل المثال ، للحمل إلى نقطة التفريغ أو مسح المسار للروبوت). تم تجهيز كل وحدة فردية أيضًا ببطاريتها الخاصة (حوالي ساعة واحدة) وجهاز تحكم دقيق وشريحة Wi-Fi. تم التحكم في جميع الوحدات لاسلكيًا بواسطة كمبيوتر مركزي ، وتم استخدام جهاز توجيه منزلي عادي لتوفير بيئة Wi-Fi.
 ظهور الجزء الرئيسي من الروبوت (الكاميرا والحامل وكاميرا RGB-D والقاعدة).
ظهور الجزء الرئيسي من الروبوت (الكاميرا والحامل وكاميرا RGB-D والقاعدة).قاعدة قاعدة الروبوت عبارة عن صندوق صغير (90 × 70 × 70 مم) مصنوع من صفائح معدنية رقيقة ، مما يسمح للوحدات النمطية بالانضمام إلى القاعدة من خلال المغناطيسية. تم تنفيذ عمليات الحوسبة باستخدام معالج Intel Atom 1.92 GHz و 4 غيغابايت من ذاكرة الوصول العشوائي و 64 غيغابايت من التخزين. أيضا ، تم تركيب محول USB Wi-Fi في القاعدة.
أهم خطوة في تنفيذ المهمة هي فهمها. تنطبق هذه القاعدة على كل من البشر والروبوتات الصغيرة الذكية. من أجل فهم ما وكيفية القيام به ، يقوم الروبوت بفحص البيئة. يتم ذلك من خلال كاميرا RGB-D.
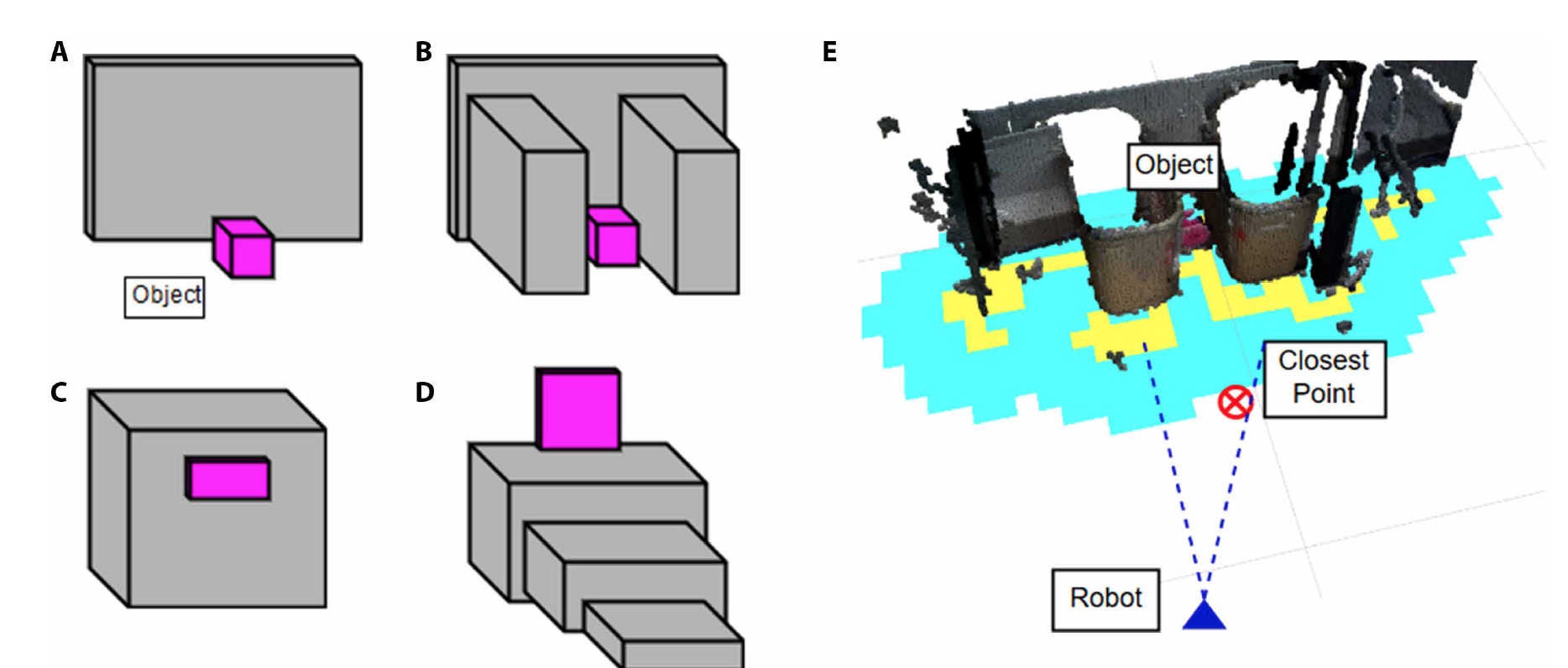 موضع الأشياء ذات الأهمية ( A ، B هي المرحلة الأولى ، C هي الثانية و D هي الثالثة) ، بالإضافة إلى مثال على كيفية "رؤية" الروبوت أثناء الاختبار مع كائن داخل فتحة ضيقة ( E ).
موضع الأشياء ذات الأهمية ( A ، B هي المرحلة الأولى ، C هي الثانية و D هي الثالثة) ، بالإضافة إلى مثال على كيفية "رؤية" الروبوت أثناء الاختبار مع كائن داخل فتحة ضيقة ( E ).عندما يتعرف نظام المسح على الكائن الضروري ، يتم تنشيط وظيفة توصيف المعلومات التي يتم الحصول عليها من خريطة ثلاثية الأبعاد للبيئة. بهذه الطريقة ، يتم تشكيل شبكة من الفضاء ، حيث يتم تمييز المناطق التي يتعذر الوصول إليها إلى الروبوت باللون الأصفر. بعد ذلك ، يجد النظام أقرب نقطة وصول إلى الكائن (بزاوية 20 درجة من الروبوت نفسه). إذا كانت المسافة من هذه النقطة إلى الكائن أكبر من قيمة الحدود ، وكان الكائن موجودًا على الأرض ، فإن النظام يحدد أن الكائن موجود في الفتحة. إذا تم تعريف الكائن بواسطة النظام في موضع فوق الأرضية ، فإنه يقوم بتقييم هذا كخطوات. إذا كانت قيمة المسافة من النقطة إلى الكائن أقل من مؤشر الحدود ، يقرر النظام استخدام التكوين "المجاني" (أي الأصل) أو "العالي" (للرفع إلى ارتفاع معين).
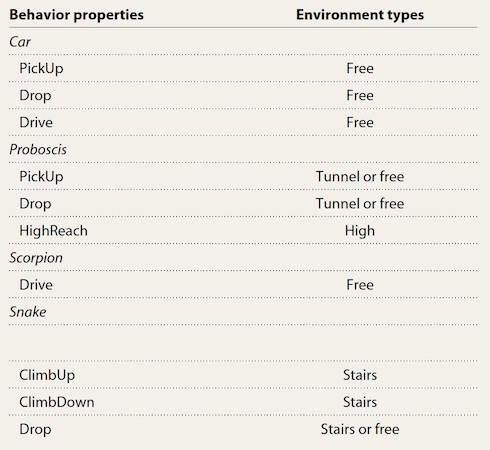 جدول تكوينات الروبوت وما هي الأغراض.
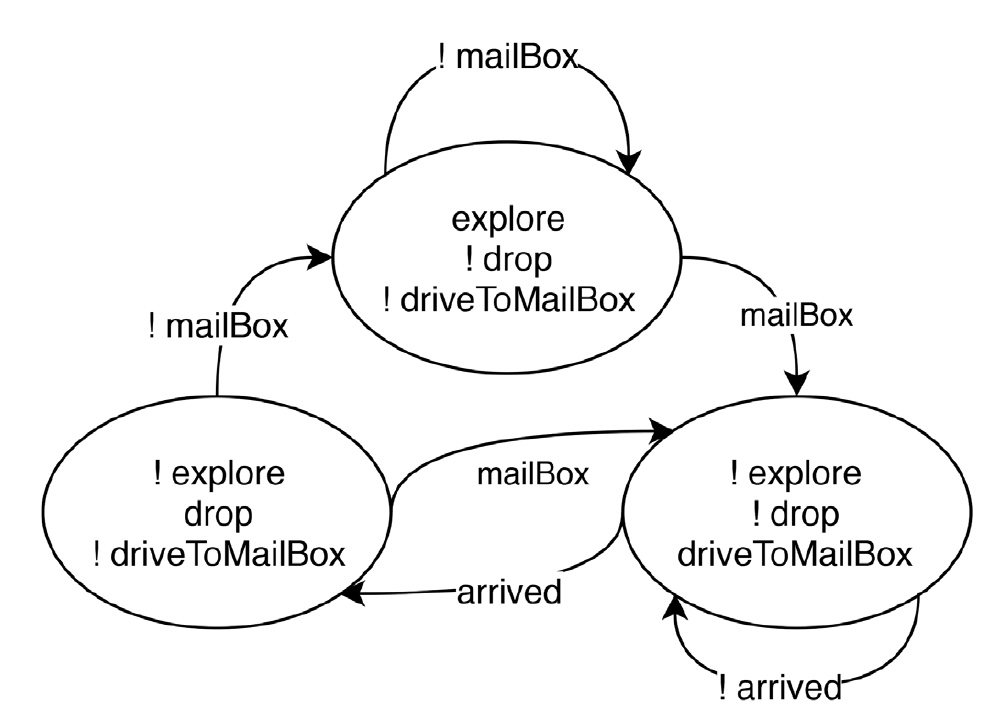
جدول تكوينات الروبوت وما هي الأغراض.إن مواصفات مهمة الروبوت بسيطة للغاية. فكر في مثال مع صندوق بريد:
- إجراء "بحث" إذا وفقط إذا كان الروبوت لا يرى صندوق البريد ؛
- تنفيذ "الحركة إلى الصندوق" إذا وفقط إذا رأى الروبوت الصندوق ولم يصل إليه بعد ؛
- قم بإجراء "إعادة تعيين" (لكائن في صندوق) إذا وفقط إذا رأى الروبوت الصندوق ويصل إليه.
من الناحية التخطيطية ، يمكن تمثيل ذلك على النحو التالي (يتم تمييز الإجراءات التي تم تمييزها بقيمة "true" و "false" بـ "!" ، اعتمادًا على المتغير):
تبدأ عملية تغيير التكوين بحقيقة أن النظام يحدد الحاجة إلى هذه العملية. إذا كان هناك واحد ، فإن الكاميرا المتجهة لأسفل تكتشف مقطعًا بطول 0.75 م × 0.5 م ، حيث يمكن أن تكون عملية إعادة التكوين ناجحة وبدون تدخل من بعض الأشياء. تحدد وحدة التحكم التكوينات الأولية والنهائية ، وبعد ذلك تقوم بإرسال إشارة إلى الوحدات النمطية التي تحمل تسمية AprilTag (تبدو مثل رمز الاستجابة السريعة). تتلقى الوحدات أمرًا لقطع الاتصال والانتقال إلى الموضع المطلوب والاتصال بتكوين جديد.
يُظهر هذا الفيديو العملية الكاملة لاختبار الروبوت ، من فحص الوسيط إلى إكمال المهمة.العنصر الأكثر فضولًا في هذا المحول الآلي لا يزال ليس القدرة على تغيير تكوين الوحدات ، ولكن القدرة على تحديد كيفية تغييره بشكل مستقل ، والتكيف مع الظروف.
تستخدم بنية النظام إطار عمل يمكّن أي مستخدم ، باستخدام المفردات الأكثر شيوعًا ، من تعيين مهمة للروبوت وتشكيل وحدة تحكم مركزية ، والتي بدورها ستتحكم في الوحدات اعتمادًا على بيئة تنفيذ المهمة. أساس كل هذا هو LTLMoP (التخطيط الخطي المنطقي MissiOn) ، والذي يسمح لك بإنشاء وحدات تحكم بناءً على تعليمات عالية المستوى مقدمة من المستخدم.
للتعرف أكثر على الدراسة ، أوصي
بتقرير الباحثين والمواد الإضافية لها.
الخاتمةهذا النظام مثير للاهتمام للغاية ، على الرغم من أنه لا يخلو من العوائق. لذا ، على سبيل المثال ، يرشد المستخدم الروبوت إلى وضع الكائن في صندوق البريد ، ولكن ليس لإسقاط الكائن حتى يتم الكشف عن صندوق البريد. وبعبارة أخرى ، لا يمكن للروبوت أن يأخذها بكلمات "F * ck it ، I quit!" يقطع المهمة. في الوقت نفسه ، إذا لم يتمكن الروبوت من الكشف عن الصندوق ، سيطلب النظام من المستخدم إدخال بيانات توضيحية. اتضح أن الروبوت ليس مستقلاً؟ لا ، بالطبع هذه ليست T-1000 ، ولكن الخطوات الأولى لذلك موجودة بالفعل. بعد كل شيء ، يقرر الروبوت نفسه أي من التكوينات المتاحة له مناسبة للمهمة بأفضل طريقة. من المستحيل تسميتها عملية فكرية ، كل شيء بسيط للغاية وخطّي هنا.
ومع ذلك ، حتى إذا كان هذا المحول الصغير يتطلب مساعدة شخص ، فلا يزال بإمكانه اتخاذ قرار. دعونا نأمل ألا نراقب حاليًا تشكيل Ultron المستقبلي. :)
Offtopic الجمعة (كل عطلة نهاية أسبوع جيدة):
فيديو لأولئك الذين لا يستطيعون تحديد من يفضله: الساموراي الرائع أو الروبوتات الرائعة.
والرسالة الثانية (آسف ، لا يمكن أن تقاوم) لعشاق الموسيقى.
شكرا لك على البقاء معنا. هل تحب مقالاتنا؟ هل تريد رؤية مواد أكثر إثارة للاهتمام؟ ادعمنا عن طريق تقديم طلب أو التوصية به لأصدقائك ،
خصم 30 ٪ لمستخدمي Habr على نظير فريد من خوادم مستوى الدخول التي اخترعناها لك: الحقيقة الكاملة حول VPS (KVM) E5-2650 v4 (6 نوى) 10GB DDR4 240GB SSD 1Gbps من 20 $ أو كيفية تقسيم الخادم؟ (تتوفر الخيارات مع RAID1 و RAID10 ، حتى 24 مركزًا وحتى 40 جيجابايت DDR4).
VPS (KVM) E5-2650 v4 (6 نوى) 10GB DDR4 240GB SSD 1Gbps حتى ديسمبر مجانًا عند الدفع لمدة ستة أشهر ، يمكنك الطلب
هنا .
ديل R730xd أرخص مرتين؟ فقط لدينا
2 x Intel Dodeca-Core Xeon E5-2650v4 128GB DDR4 6x480GB SSD 1Gbps 100 TV من 249 دولارًا في هولندا والولايات المتحدة! اقرأ عن
كيفية بناء مبنى البنية التحتية الطبقة باستخدام خوادم Dell R730xd E5-2650 v4 بتكلفة 9000 يورو مقابل سنت واحد؟