في مقالاتي السابقة ، تحدثت عن كيفية مساعدة الأشخاص المصابين بالشلل على التواصل مع العالم الخارجي: توصيل رغباتهم وكتابة الرسائل وتصفح الإنترنت باستخدام عيونهم فقط وجهاز يتتبع نظرك (تعقب العين). في هذه الحالة ، جسديًا ، لا يزال الشخص محدودًا بعالم الكمبيوتر والسرير.
هنا سأتحدث عن أبسط الطرق (في رأيي) لتغيير شيء ما في العالم الخارجي بنفسي: قم بتشغيل الضوء أو إكليل على شجرة السنة الجديدة ، والتحكم في مركبة لجميع التضاريس على جهاز تحكم لاسلكي ، وجعل عربة بمحرك تتحرك في الاتجاه الصحيح.
المحتويات
مقدمةالمكونات المطلوبةقم بتوصيل اردوينو بالكمبيوترنظام التحكم في مأخذ التيار الكهربائيدائرة التحكم في المحركمقدمة
بالإضافة إلى جهاز تتبع النظرات والبرامج المجانية له ، الموصوفة هنا في
هذه المقالة ، نحتاج إلى شيء يربط الكمبيوتر بأشياء خارجية.
على الرغم من بيع العديد من الأجهزة التي يمكن التحكم فيها من جهاز كمبيوتر ، كان الخيار الأبسط والأرخص بالنسبة لي هو استخدام جزأين: لوحة Arduino ولوحة متعددة المرحلات.
إذا لم تصادف أبدًا Arduino ، فلا تزال لا تتخلى عن القراءة ، في المستقبل سترى أنه في هذا السياق من السهل جدًا العمل معها ، فليس هناك الكثير من مصممي الأطفال الذين يعتمدون على Arduino للبيع.
في الوقت نفسه ، إذا لم تكن على دراية بالسلامة الكهربائية ولم تقم أبدًا بتوصيل الأسلاك الكهربائية في المنزل ، فلا تحاول تكرار الدوائر التي تستخدم الاتصال بالمنافذ!
كل ما تحتاج لمعرفته حول Arduino: هذا جهاز صغير يمكن توصيله بمنفذ USB الخاص بالكمبيوتر ، وبعد ذلك يمكنه تشغيل / إيقاف الإشارات الكهربائية على جهات الاتصال وفقًا للتعليمات الواردة.
الإشارات منخفضة الطاقة إلى حد ما ، وبالتالي ، للتحكم في شيء أكثر قوة (المصابيح الكهربائية ، على سبيل المثال) ، نضع وحدة ترحيل ، والتي ، استجابةً للإشارة من Arduino ، تغلق وتفتح جهات التحكم في الأجهزة الخارجية. بالإضافة إلى ذلك ، تقوم المرحلات بعزل الدوائر الكهربائية لجهاز كمبيوتر Arduino + عن الدوائر الكهربائية للجهاز المُدار.
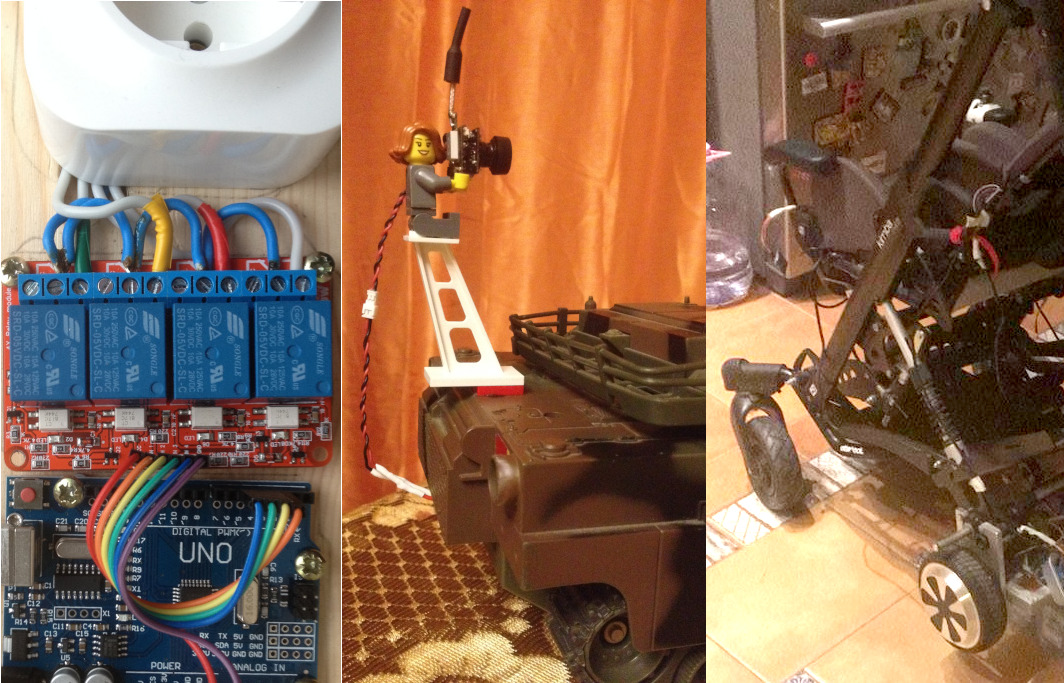
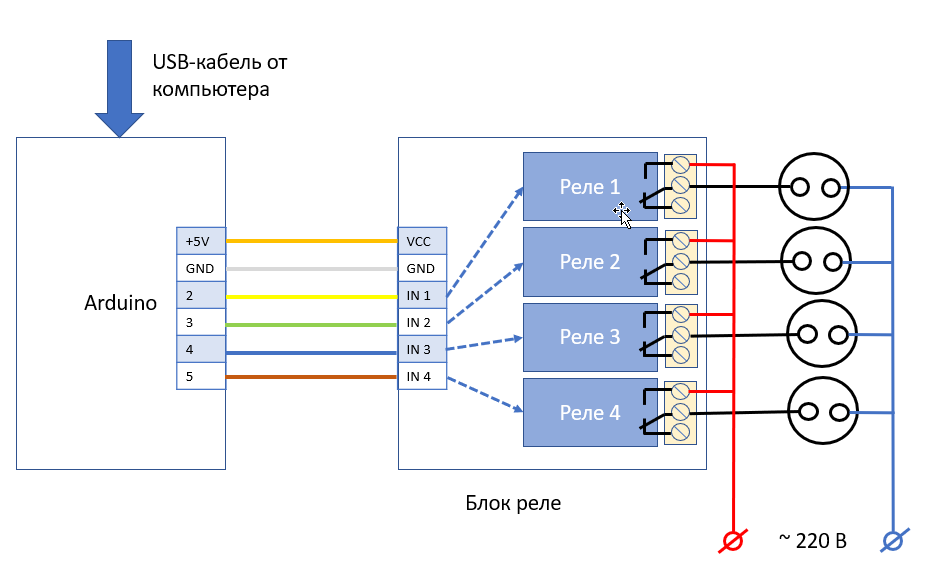
لذا ، فإن أساس دوائر التحكم في المخارج والمحركات الكهربائية ، والذي سيتم وصفه لاحقًا ، هو ما يلي: جزءان متصلان بأسلاك ببعضهما البعض ، متصلان بواسطة كابل USB بجهاز كمبيوتر وأسلاك بما نريد التحكم فيه:

في العالم الحقيقي ، قد يبدو مثل هذا:
نرسل أمرًا من جهاز كمبيوتر ، Arduino أحد جهات الاتصال الخاصة به يقوم بتشغيل / إيقاف التتابع ، وهو التبديل من أي جهاز أو زر منفصل على الجهاز.
المكونات المطلوبة
سنحتاجها (بين قوسين أسعار 2018 في متجر محلي. يمكن لأولئك الذين يمكنهم الشراء في الصين توفير الكثير من المال ، ولكنهم يخسرون في الوقت المناسب):
1) لوحة Arduino UNO مع كبل USB (من الممكن أن تكون خدمة ما بعد البيع ، مع CH340 رخيصة بدلاً من FTDI باهظة الثمن) (450 روبل)
2) لوحة بأربع مرحلات تعمل بجهد 5 فولت وقادرة على التحكم في الأجهزة بجهد 220 فولت. (450 روبل). لا تزال هناك لوحات تعمل على 12 فولت ، لا تخلطها!
3) حفنة من الأسلاك لتوصيل لوحتين. في حالتي ، كانت هناك حاجة إلى أسلاك ذات مقبس على جانب واحد ودبوس على الجانب الآخر ، لأن كتلة الترحيل تحتوي على جهات اتصال دبوس ، ولدى Arduino مآخذ. انظر إلى الموصلات الموجودة على لوحاتك عند شراء الأسلاك (150 روبل).

قم بتوصيل اردوينو بالكمبيوتر
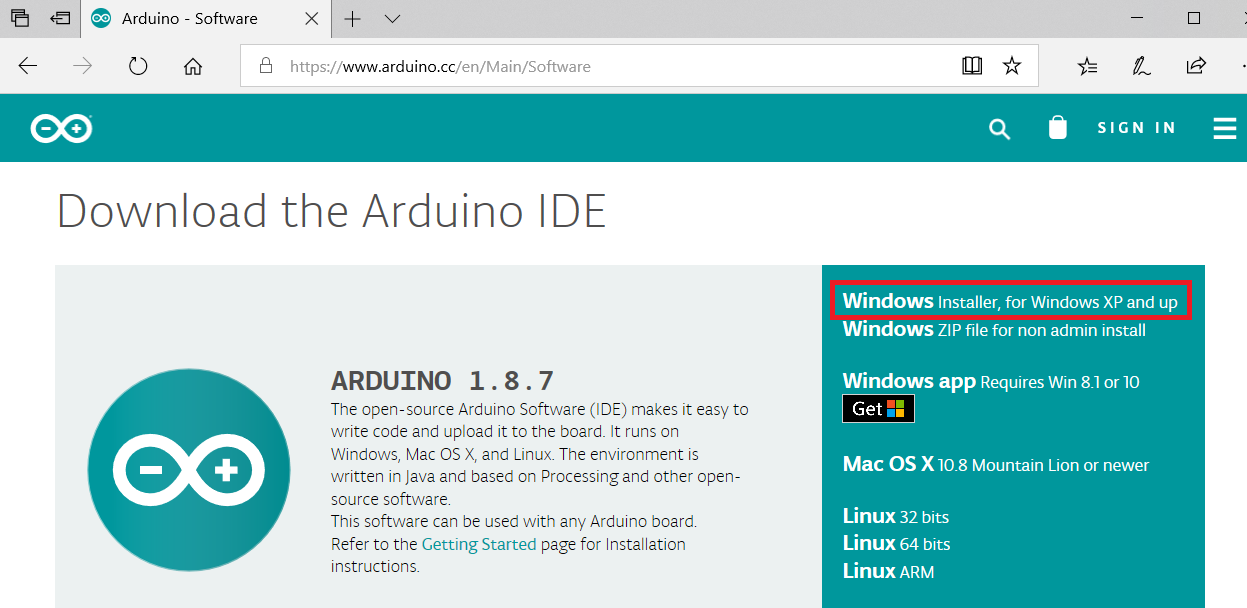
أولاً ، قم بتثبيت برنامج البرمجة Arduino من
www.arduino.cc :
في الصفحة
https://www.arduino.cc/en/Main/Software ، انقر فوق "Windows Installer":
انقر فوق "تنزيل فقط":
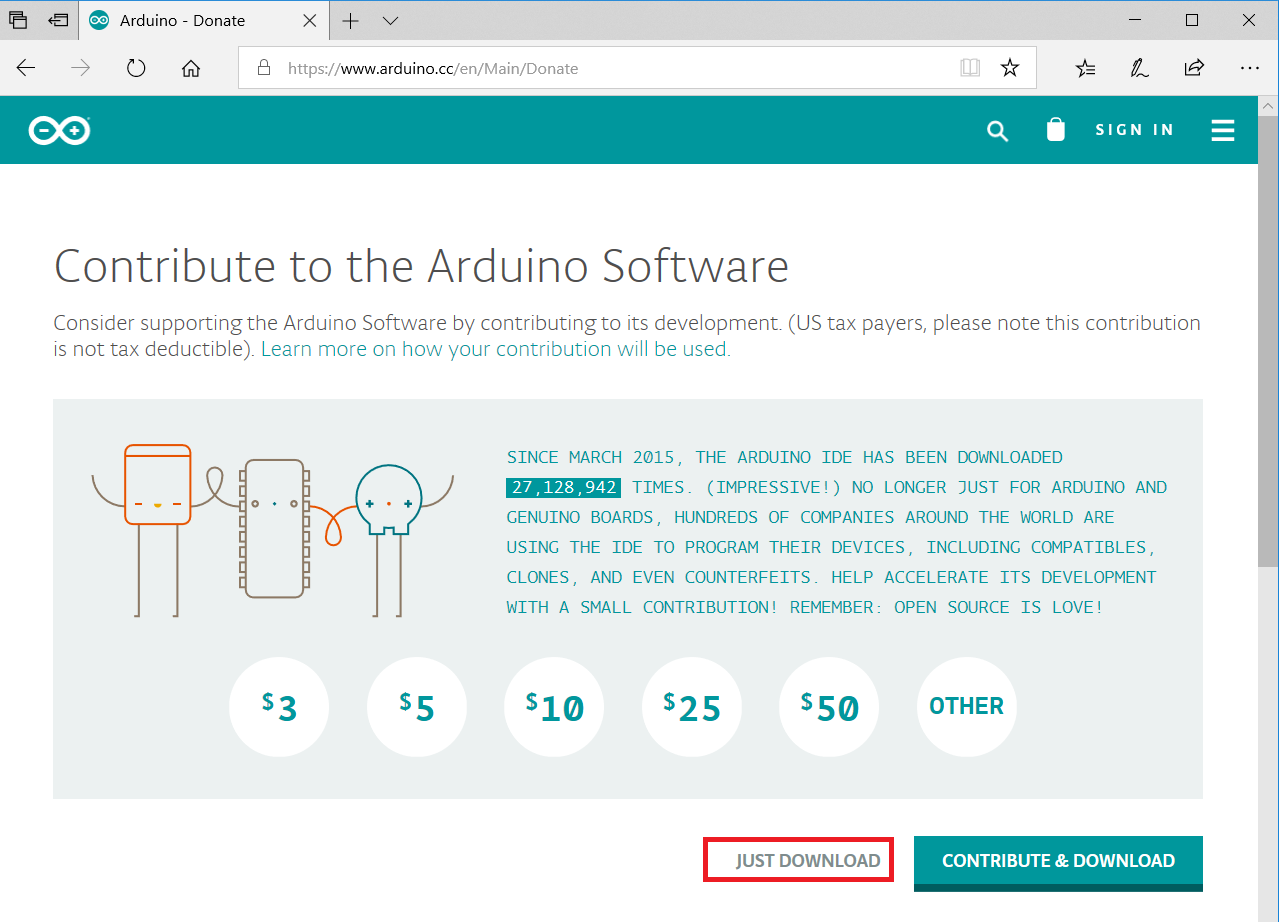
قم بتنزيل المثبت وتشغيله:

نتفق على كل شيء:



عند تثبيت البرنامج ، قم بتوصيل لوحة Arduino والكمبيوتر بكابل USB.
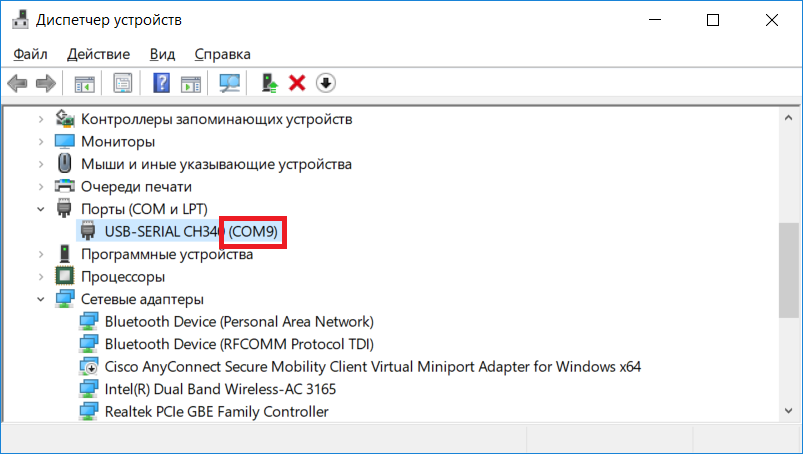
تضيء الأضواء الموجودة على لوحة Arduino ، وفي مدير الجهاز سترى ظهور منفذ جديد ، وقد تم تعيينه لرقم معين ، على سبيل المثال ، COM3:
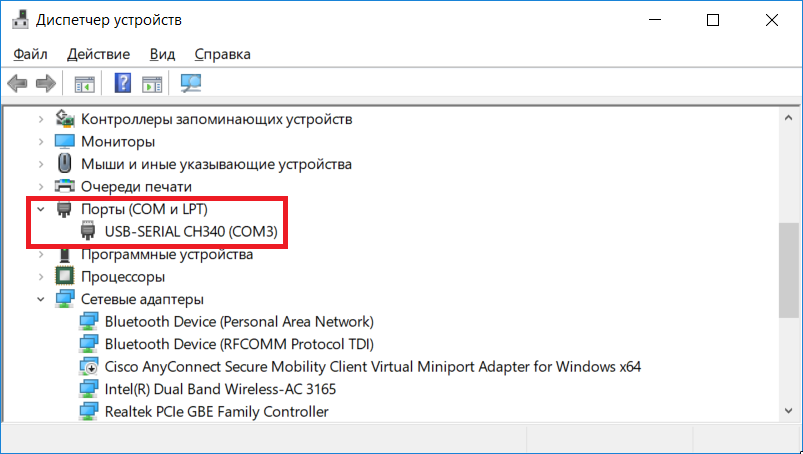
دعنا نغير رقمه إلى COM9 ، لأنه في المستقبل سيتم ربط كل شيء بشكل خاص بـ COM9. للقيام بذلك ، انقر بزر الماوس الأيمن عليها ، اتصل بقائمة السياق وحدد "خصائص" فيه:

في علامة التبويب "معلمات المنفذ" ، انقر فوق الزر "متقدم":
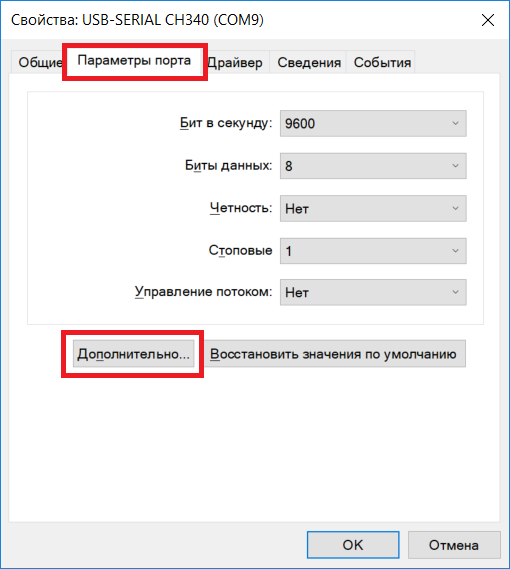
وأخيرًا ، حدد "COM9" كرقم منفذ COM.
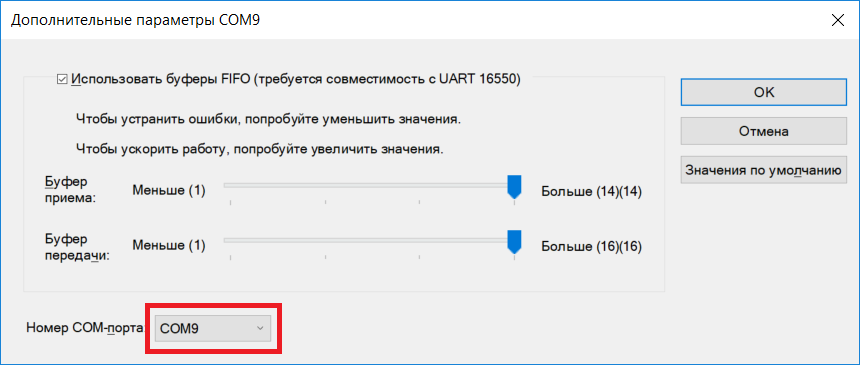
أغلق جميع النوافذ المفتوحة باستخدام الزر "OK" ، ثم قم بإزالة كابل USB وإدخاله للتحقق من أن Arduino سيواصل الاتصال عبر منفذ COM9 إذا تم إدخاله في نفس منفذ USB للكمبيوتر:
الآن اتصل وقم بتكوين برنامج Arduino الذي تم تثبيته مؤخرًا من الموقع:

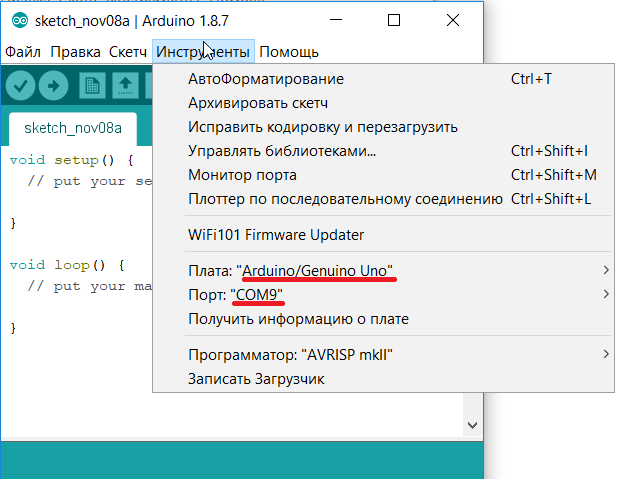
في قائمة "أدوات" ، اضبط لوحة "Arduino UNO" والمنفذ "COM9":
الآن كل شيء جاهز لجمع المخططات وبث الحياة فيها.
نظام التحكم في مأخذ التيار الكهربائي
إذا لم تكن على دراية بالسلامة الكهربائية ولم تقم أبدًا بتوصيل الأسلاك في المنزل ، فلا تحاول تكرار هذا الرسم التخطيطي! تستخدم الدائرة جهدًا يهدد الحياة!مرة أخرى ، تحكم في الأسئلة:
- هل تعرف كيف تميز السلك ذو الطور عن السلك ذو الصفر في المقبس؟
- هل تعرف كيف تدق الأسلاك وتأكد من عدم وجود دائرة قصر بعد توصيلها؟
إذا كنت تجيب على هذه الأسئلة بشكل غير مؤكد ، اطلب من شخص أكثر خبرة تجميع الدائرة.
الآن إلى النقطة.
يعمل مثل هذا:
يبدو مخطط اتصال المقبس كما يلي:
نقوم بتزويد الصفر مباشرة إلى المقابس ، والمرحلة من خلال التتابع. إذا فعلت العكس ، فستعمل ، ولكن سيكون هناك خطر حدوث صدمة كهربائية من أجهزة OFF MALFUNCTIONAL. أي انتزاع التلفزيون المعطل ، وسوف يصدمك.
إذا كان المنزل يحتوي على أرض واقية ، فاستخدم منفذًا أرضيًا.
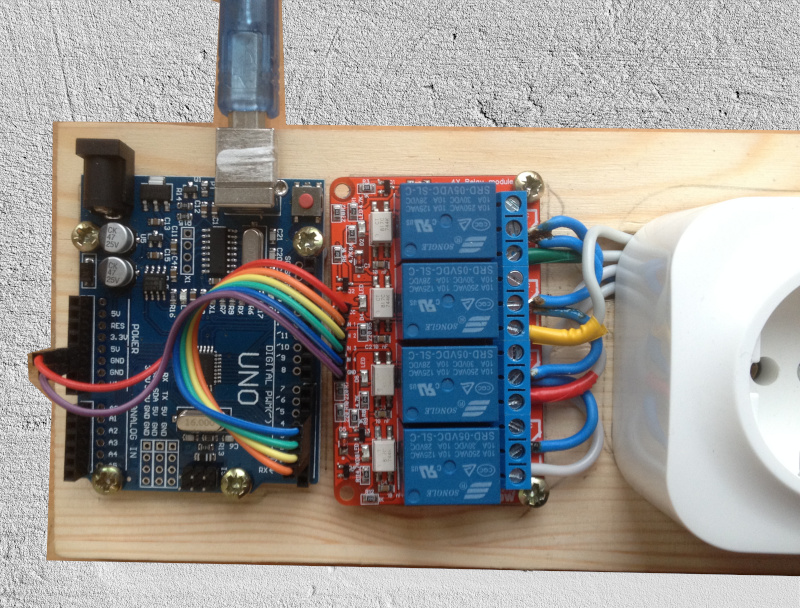
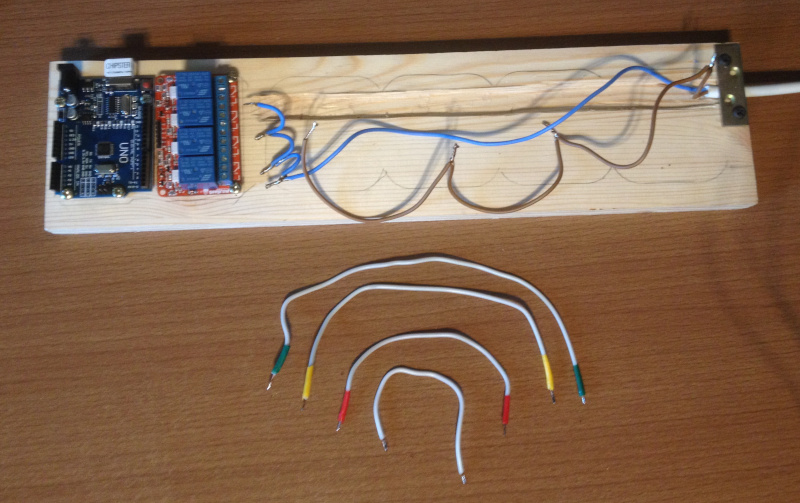
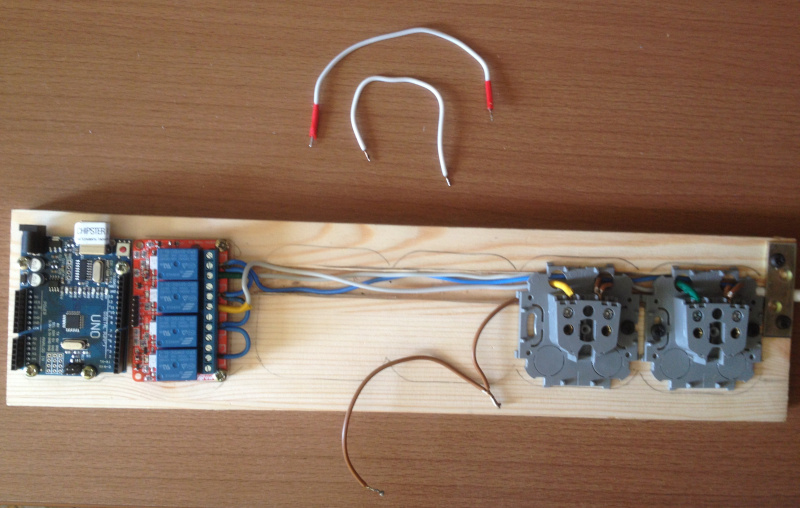
التالي هو التصميم المرجعي الخاص بي. فيه ، أخطأت في لون الأسلاك: لون السلك المحايد تحول إلى اللون البني وأطوار الأزرق. انتبه لهذا.
نأخذ قطعة من اللوحة بالحجم المناسب لتناسبها (من اليسار إلى اليمين): Arduino ، كتلة الترحيل ، أربعة مآخذ ، قوس لضغط السلك على اللوحة.

نقطع الفائض ونستخدم إزميلًا لعمل أخدود للأسلاك بحيث تتناسب بحرية مع المقابس.

نقوم بتثبيت ألواح Arduino وكتلة الترحيل بمسامير على اللوحة ، ونضع غسالات بلاستيكية.

إذا لم تكن الغسالات في متناول اليد ، يمكنك قطع المسامير:

تحضير الأسلاك: قطع إلى الطول المطلوب وتجريده من العزل. يُنصح بقصها بمكواة اللحام في أماكن التلامس مع المقابس والمرحلات.
اضغط على السلك إلى اللوح مع حامل بحيث لا يمكن سحبه للخارج.

نقوم بتوصيل الأسلاك وربط المقابس. نسمي السلسلة.

نقوم بتوصيل لوحة Arduino بوحدة الترحيل بمجموعة من الأسلاك وفقًا للرسم البياني أعلاه.
نحن نغطي الألواح بغلاف واق من المواد غير الموصلة.
يجب القيام بذلك هنا ، لأن الجهد الذي يهدد الحياة مناسب لكتلة التتابع! في الحالة القصوى ، لف على الأقل الاتصالات الكهربائية للترحيل.
لقد استخدمت حاوية للمنتجات المصنوعة من البلاستيك الصلب كغلاف ، وأرفقها بمسامير:

تذكر عمل ثقب لكابل USB.

قم بتوصيل الجهاز بالكمبيوتر ، ولكن
لا تقم بتوصيله بمأخذ الطاقة .
أطلقنا برنامج "Arduino" وننسخ هذا النص من البرنامج هناك:
ثم انقر فوق زر تنزيل البرنامج في Arduino (انظر الشكل أدناه). إذا سار كل شيء دون أخطاء ، فإننا نرى النقش "اكتمل التنزيل".

تحقق من أن جهازنا ينفذ الأوامر. للقيام بذلك ، اتصل بمراقب المنفذ:

الآن سنكتب الرقم
1 ونضغط على Enter أو الزر "إرسال":

سيتم سماع صوت مميز للتتابع وسوف يتصل الاتصال في المقبس الأول بسلك الطور. تحقق من هذا مع اختبار. ثم اطلب الرقم 0 وسيقوم المرحل بفصل جهة الاتصال.
بالنظر إلى نص البرنامج ، يمكنك معرفة ما سيحدث إذا كتبنا بأرقام أخرى:
3.2 - قم بتشغيل وإيقاف المنفذ الثاني
5،4 - قم بتشغيل وإيقاف المنفذ الثالث
7.6 - قم بتشغيل وإيقاف تشغيل المنفذ الرابع
تحقق مع اختبار اتصال هذه المنافذ. بعد التحقق ، يمكنك توصيل السلك بالجهد في الشبكة وبدء تشغيل / إيقاف تشغيل الأجهزة الحقيقية.
مهمتنا التالية هي تشغيل الأجهزة وإيقافها بنظرة سريعة. للقيام بذلك ، نقوم بتكوين برنامج
bkb الموصوف هنا في
هذه المقالة
(الإصدار الأخير من البرنامج مطلوب !!!) .
لنفترض أننا نريد تشغيل وإطفاء مصباح وزهرة شجرة عيد الميلاد.
في برنامج الرسام القياسي ، نرسم أربعة رسومات 200 × 200 بتنسيق
BMP :
 سننشئ
سننشئ أيضًا أربعة ملفات دفعية:
c.cmd ، d.cmd ، e.cmd ، f.cmdسوف تحتوي على أوامر لإرسال الأحرف 1،0،3،2 إلى منفذ COM9. ونتذكر أنها تقوم بتشغيل وإيقاف المقابس الأولى والثانية. من المهم عدم وجود أسطر فارغة بين السطرين في هذه الملفات!
c.cmd:
MODE COM9: BAUD=9600 DATA=8 STOP=1 PARITY=N to=off xon=off odsr=off octs=off rts=off idsr=off dtr=off echo 1 > com9:
يوم سم:
MODE COM9: BAUD=9600 DATA=8 STOP=1 PARITY=N to=off xon=off odsr=off octs=off rts=off idsr=off dtr=off echo 0 > com9:
e.cmd:
MODE COM9: BAUD=9600 DATA=8 STOP=1 PARITY=N to=off xon=off odsr=off octs=off rts=off idsr=off dtr=off echo 3 > com9:
f.cmd:
MODE COM9: BAUD=9600 DATA=8 STOP=1 PARITY=N to=off xon=off odsr=off octs=off rts=off idsr=off dtr=off echo 2 > com9:
نقوم بالكتابة فوق ملفات.
bmp و.
cmd التي تم إنشاؤها في دليل
الشبكة لبرنامج
bkb .
بعد بدء برنامج
bkb في وضع الجدول ، سيظهر سطر خامس جديد مع صورنا:

عندما نلقي نظرة على الصورة ، يتم إطلاق الإجراء المقابل.
انتباه! في المرة الأولى بعد بدء البرنامج ، لا يعمل الإجراء. كل الأوقات اللاحقة - يعمل. هذا يرجع إلى حقيقة أنه أثناء التهيئة الأولى للمنفذ ، تتغير الإشارة على خط DTR ، مما يؤدي إلى إعادة تشغيل Arduino ، والذي يستمر حوالي ثلاث ثوانٍ.
يقولون أن هذا يمكن حله بمكواة لحام ، لكنني لم أجرؤ على الانخراط في مثل هذه المجوهرات. حتى الآن ، فقط تذكر أنه في المرة الأولى التي تحتاج فيها إلى تشغيل مرتين.
ملاحظةربما كنت قد فهمت بالفعل أنه في ملفات .cmd يمكنك استدعاء أي برامج خارجية. إذا كان لديك أي جهاز يمكن التحكم فيه من سطر الأوامر ، يمكنك تنفيذ هذه الأوامر بنفسك عن طريق إسناد الإجراءات اللازمة إلى أي صور في الجدول.
دائرة التحكم في المحرك
قام صديقي بترقية سكوتر الجيروسكوب واستبداله بالمحور الخلفي لعربة الأطفال. تم تنفيذ الإدارة عن طريق أجهزة التحكم عن طريق مجلس Arduino.

قررنا محاولة إعطاء الطفل الفرصة للسيطرة على عربة الأطفال بنظرة واحدة. للقيام بذلك ، تمت إضافة وضع التحكم في
الكرسي المتحرك إلى
برنامج bkb .

بعد البدء في هذا الوضع ، تظهر الأسهم على الشاشة ، وهي نظرة تتسبب في إرسال البرنامج لأحرف التحكم إلى منفذ COM9 ، والتي يتم تفسيرها بعد ذلك بواسطة عربة الأطفال للتحرك إلى الأمام / الخلف ، والانعطاف لليسار / لليمين والتوقف.
أثناء الانتهاء من عربة الأطفال ، قررت استخدام نفس البرنامج للتحكم عن بعد في نموذج الخزان المتتبع. هذا أيضًا شيء مفيد جدًا. أولاً ، يتلقى الطفل مهارات مفيدة للتحكم في عربة الأطفال. ثانياً ، هذه مجرد لعبة مثيرة.

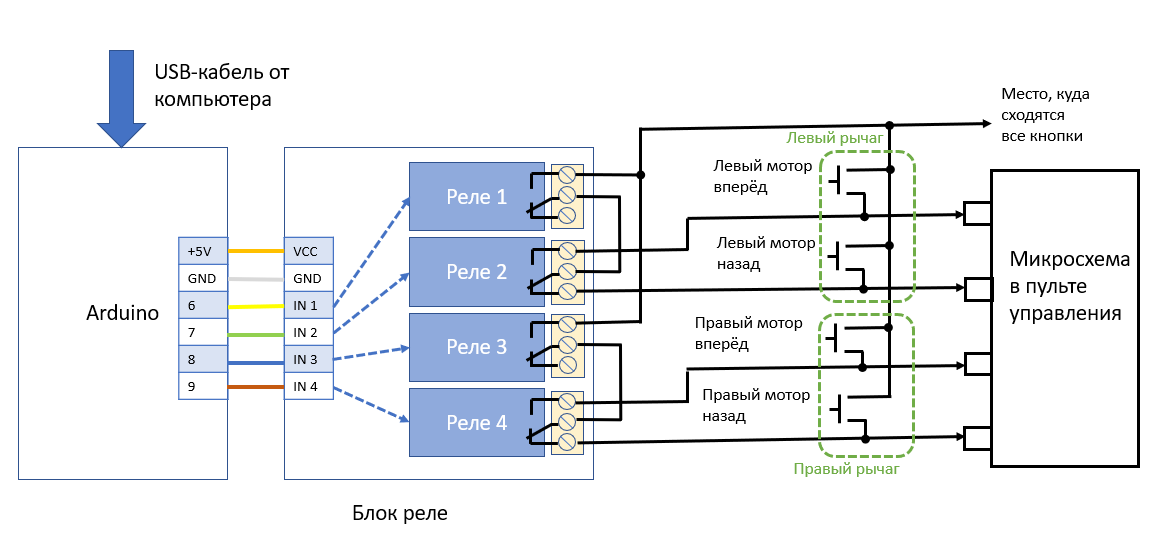
يتم التحكم في كل من مسارات الخزان بواسطة ذراع يمكن تحريكه للأمام أو للخلف. عند تحريك الذراع إلى الأمام ، يضغط على الزر ، مما يجبر المحرك على الدوران للأمام. عند تحريك الذراع للخلف ، يضغط على الزر ، مما يجعل المحرك يدور في الاتجاه المعاكس. لا يمكن الضغط على زرين في نفس الوقت - من المستحيل للأمام وللخلف.
تم توصيل وحدة الترحيل بأزرار وحدة التحكم عن بعد وفقًا للرسم البياني أدناه. لا تسمح الدائرة بتفعيل أزرار "المحرك الأمامي" و "المحرك الخلفي" في وقت واحد. يقوم أحد المرحلات بتشغيل / إيقاف المحرك ، والثاني يحدد الاتجاه إلى الأمام أو الخلف.
ابحث على لوحة التحكم عن مكان توصيل الأزرار وتوصيلها بها ، وفقًا للرسم البياني أعلاه.
يرجى ملاحظة أنه على عكس الدائرة السابقة ، يتحكم Arduino في كتلة الترحيل بالدبابيس من 6 إلى 9.
لقد قمت بتوصيل كتلة الترحيل بوحدة التحكم عن بعد من خلال الموصل بحيث يمكن فصل وحدة التحكم عن بعد واستخدامها بشكل منفصل:

يتلقى البرنامج الذي يحتاجه Arduino لتنزيل نفس الأوامر من جهاز الكمبيوتر المستخدم للتحكم في عربة الأطفال الآلية:
F- إلى الأمام
ب-الظهر
اليسار ل
R- اليمين
توقف S
ويرد نص البرنامج أدناه.
إذا تم قطع الاتصال بالكمبيوتر (لا تصل أي أحرف في غضون 0.3 ثانية ، فإن Arduino يوقف المحركات). يمكن نمذجة هذا الموقف عن طريق إغلاق عينيك أثناء التحكم في عينيك. لن يتمكن Aitreker من تحديد اتجاه العرض ولن يتم إرسال الإشارات. سوف تتوقف المحركات.
لقد قمت بتجهيز طراز الخزان بكاميرا فيديو ، والتي يطلق عليها عادةً سعر الصرف ، أو FPV (عرض الشخص الأول) ، الذي ينقل إشارة تناظرية بتردد حوالي 5.8 جيجا هرتز. أخذت واحدة من أرخص الكاميرات ، وهي مجهزة أيضًا بجهاز إرسال وهوائي: AKK BA-3. كلفني 1050 روبل. الكاميرا مع جهاز الإرسال صغيرة جدًا بحيث تناسبها في شكل شخصية Lego:

كل ما يجب القيام به لكي تعمل الكاميرا هو توصيلها بالطاقة (من 3.2 إلى 5.5 فولت). ثم باستخدام زر واحد ، حدد نطاق وتردد وقوة جهاز الإرسال.
ترتفع درجة حرارة الكاميرا بشكل كبير ، لذلك أوصي بتعيين الحد الأدنى من الطاقة (25 مللي واط). بالإضافة إلى ذلك ، قمت بتوصيلها ببطارية الخزان بجهد 6 فولت ، وهو ما يتجاوز القيم المسموح بها. لذلك ، لا أعرف إلى متى سيستمر. أوصي باستخدام مثبت الجهد لتشغيل الكاميرا.
عند توصيل الكاميرا ، قمت بلصق عنصر واحد من مُنشئ Lego بالخزان ، وتم إرفاق العناصر المتبقية به بالفعل بواسطة اتصال بسيط. هذا يجعل من السهل إزالة وترتيب الكاميرا. أيضًا ، عند الاصطدام بعائق ، يمكن للكاميرا ببساطة أن تنثني ، مما سيوفرها من التلف.

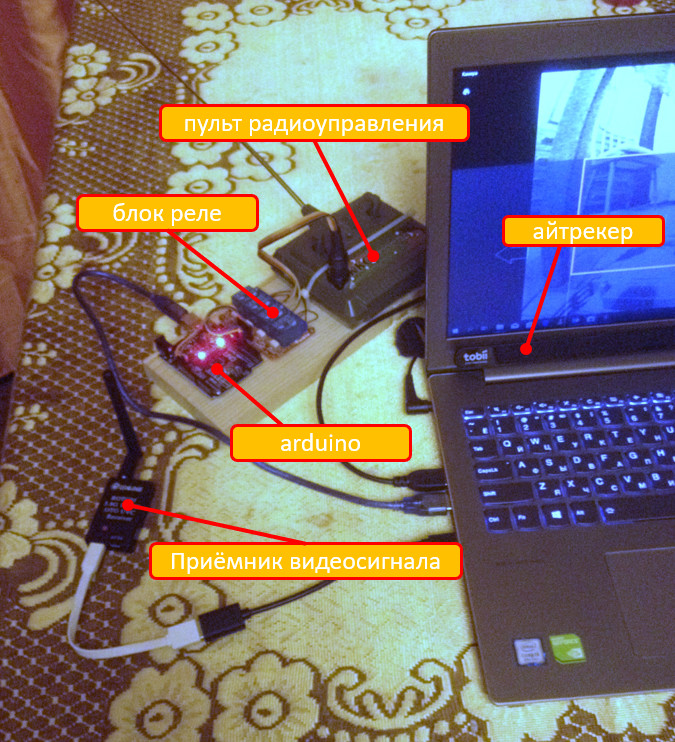
لتلقي إشارة الفيديو من الكاميرا ، استخدمت جهاز استقبال Eachine ROTG01. لم يأخذ جديدة مقابل 1800 روبل. إنه مجرد مربع بهوائي يتصل بمنفذ USB للكمبيوتر ويكون مرئيًا ككاميرا USB. أي أننا نطلق تطبيق الكاميرا في Windows ونرى ما يقبله جهاز الاستقبال. حتى في البداية ، تحتاج إلى الضغط باستمرار على الزر الوحيد في جهاز الاستقبال حتى يقوم بمسح الأثير والعثور على التردد الذي ترسل فيه الكاميرا إشارة.
بشكل عام ، نحتاج إلى ثلاثة منافذ USB في الكمبيوتر:
- لتتبع تكنولوجيا المعلومات
- بالنسبة لاردوينو ، التحكم في لوحة تحكم الخزان
- لمستقبل الفيديو
نبدأ إخراج الصورة من الكاميرا ، على سبيل المثال ، برنامج "الكاميرا".
أطلقنا برنامج
bkb وحدد وضع التحكم
لعربة الأطفال الآلية.
يظهر ما يمكن أن يحدث بعد ذلك في الفيديو:
يمكن ملاحظة أن سرعة الحركة ، وخاصة سرعة الدوران ، كبيرة جدًا. لذا ، إذا اخترت نموذجًا يتم التحكم فيه عن طريق الراديو ، فاختر أبطأ. حفارة أو شيء من هذا.
ولماذا لا تأخذ "روبوت التجسس" النهائي؟
وقعت في يد أحد هؤلاء ، HappyCow 777-325.

كنت مسرورًا: لديه كل شيء ، وجهاز التحكم عن بُعد ، ونقل الفيديو ، وهو يركب ببطء شديد. ومع ذلك ، هناك ميزة واحدة - يتم التحكم فيها فقط من خلال تطبيق في Android أو iOS. حسنًا ، سنحل هذا من خلال التحكم عن بُعد في Android ، على سبيل المثال ، باستخدام
scrcpy .
ولكن اتضح أنه بالإضافة إلى أوجه القصور التي يمكن تصحيحها (زاوية الرؤية الضيقة للكاميرا) ، فإن الجهاز يحتوي على واحد غير صالح. الفيديو الذي تم نقله عبر Wi-Fi لديه تأخير رهيب.
أي أن هذا الروبوت اصطدم بشيء لفترة طويلة ، وأنت تضغط على الغاز ، معتقدة أنه لم يصل إلى عقبة.
بالنسبة للطفل الذي يتعلم التحكم في جهاز عن بعد ، هذا في رأيي غير مقبول.
لذلك يحصل الروبوت على استقالة. على الرغم من أنني استعارة الهيكل منه.
الخلاصة
أتمنى لكم التوفيق في تكرار وتطوير الحلول التقنية الموصوفة.