
شهد النموذج المحدث لكاميرا RealSense 435 ، التي حصلت على مؤشر i ، الضوء. ميزته المميزة هي مستشعر القصور الذاتي المدمج (وحدة القياس بالقصور الذاتي). هل الاسم Intel RealSense لا يقول شيئًا لك؟ اذا هذا المنشور لك تم وصف تطوير هذه التكنولوجيا في مثل هذه التفاصيل في مدونة الشركة التي يمكنك أن تروي قصتها دون تجاوز منطقة هبرة. هذا ما سنفعله على الأرجح ، لأن RealSense مؤخرًا لم تقل ما يُسمع - على الرغم من أن هذا غير عادل.
 كاميرا إبداعية مع دعم Intel Perceptual Computing SDK. 2013 سنة
كاميرا إبداعية مع دعم Intel Perceptual Computing SDK. 2013 سنةتم تطوير تقنيات التصوير ثلاثي الأبعاد في Intel منذ أوائل عام 2000.
ظهر اسم RealSense
في عام 2014 ، ليحل محل
الحوسبة الإدراكية المستخدمة سابقًا ؛ ثم
جاءت Intel RealSense SDK وكاميرا النموذج. يتكون مبدأ تشغيل الكاميرات ثلاثية الأبعاد من تشكيل متزامن لنوعين من الصور: إطار RGB عادي وخريطة عمق تم الحصول عليها باستخدام بواعث وأجهزة استشعار بالأشعة تحت الحمراء. يمكن استخدام صورة غنية ببيانات العمق في معالجة وتحليل الكائنات المصورة (على سبيل المثال ، تقسيم الخلفية أو تحريك نقطة التركيز) ، بالإضافة إلى واجهة طبيعية للتحكم في أنظمة الكمبيوتر البشرية باستخدام تعبيرات الوجه وحركات اليد والأصابع والإيماءات.
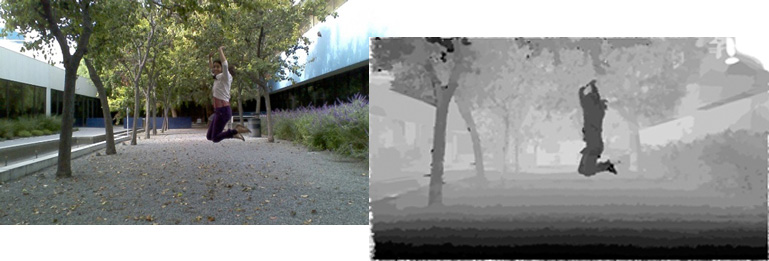 صورة RGB وخريطة عمق له
صورة RGB وخريطة عمق لهعلى مدار العامين التاليين ، قامت Intel بترويج RealSense بنشاط على جميع الجبهات. عقدت
مسابقات مطورين منتظمة ، خرج العديد من
المواد التدريبية والمرجعية . في عام 2015 ، تم إصدار كاميرتين من سلسلة RealSense:
F200 الأمامية و R200 الخلفية . في هذه الحالة ، خضعت لفحص شخصي: في عطلة رأس السنة الجديدة في عام 2016 ، أتيحت لي الفرصة
لاختبار الكاميرتين في المنزل . كانت هناك خطط لتطبيق RealSense في أجهزة الكمبيوتر المحمولة
والهواتف الذكية وأجهزة الكمبيوتر الأخرى ، ولكن بعد ذلك كان كل شيء يقتصر على الكاميرات للكمبيوتر الشخصي.
 كاميرا Intel RealSense SR300. 2016 سنة
كاميرا Intel RealSense SR300. 2016 سنةمر الوقت ، وتحسن البرنامج ، وجاءت الكاميرات الجديدة أولاً من الجيل
الثاني ، ثم الجيل
الثالث . في كل مرة
تم إدخال تحسينات جديدة : زادت دقة تحديد العمق ، سهولة الاستخدام ، ظهرت وظائف التعرف الجديدة. واصلت Intel
التفاعل مع المطورين وتلقي تعليقات منهم. في المدونة ، نشرنا بنشاط ترجمات باللغة الروسية لمقالات على
RealSense SDK - كان هذا أحد مصادر المعلومات القليلة حول RealSense باللغة الروسية. وهذا صحيح حتى يومنا هذا.
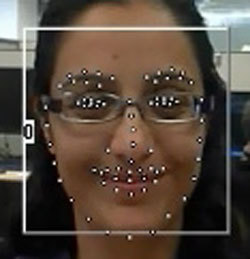 سمحت Intel RealSense SDK 1.0 بتتبع ما يصل إلى 76 نقطة رئيسية للوجه ؛ وفي الإصدارات المستقبلية ، زاد عدد النقاط
سمحت Intel RealSense SDK 1.0 بتتبع ما يصل إلى 76 نقطة رئيسية للوجه ؛ وفي الإصدارات المستقبلية ، زاد عدد النقاطفي الوقت الحالي ، تعد عائلة الكاميرات Intel RealSense D400 التي تم إصدارها في وقت سابق من هذا العام ذات صلة. تتكون الأسرة من كاميرتين: D415 و D435. توفر الكاميرا D415 صورة أوضح ، ولكن لها سرعة أقل ومسافة دنيا أبعد. تعد كاميرا D435 أكثر ملاءمة لتطبيقات AR / VR لأن غالقها العالمي يعمل بشكل أفضل مع الأهداف سريعة الحركة. يتم إعطاء خصائص أكثر تفصيلا للكاميرات في الجدول.
| D415 | D435 |
|---|
| التطبيق | داخلي / خارجي |
| تحديد العمق | شعاع الأشعة تحت الحمراء المزدوج |
| نوع مصراع | انزلاق | عالمي |
| حجم بكسل | 1.4 × 1.4 ميكرومتر | 3 × 3 ميكرون |
| حجم حقل العمق | 63.4 درجة × 40.4 درجة | 85.2 درجة × 58 درجة |
| دقة مجال العمق | 1280 × 720 |
| خيارات تدفق RGB | 1080 بكسل بسرعة 30 إطارًا في الثانية |
| نطاق العمق | 0.16 - 10 م | 0.11 - 10 م |
| حجم الكاميرا (العرض × العمق × الارتفاع) | 99 × 20 × 23 مم | 90 × 25 × 25 مم |
الآن خضعت كاميرا D435 للتحديث - كما ذكرنا سابقًا ، تمت إضافة مستشعر حركة IMU بالقصور الذاتي 6 محاور. على الرغم من صغر التغييرات ، لا يمكن اعتبارها غير مهمة بأي شكل من الأشكال ، لأنها تفتح نطاقًا جديدًا لـ RealSense. إذا كان من المفترض عادةً أن تكون الكاميرا كائنًا ثابتًا قبل الكاميرا ، تتم الآن إضافة بيانات الموضع والحركة إلى الصورة ثلاثية الأبعاد - وهي قيمة في حد ذاتها ، علاوة على ذلك ، تزيد من دقة تحديد العمق. أصبح RealSense أسهل وأكثر ملاءمة للاستخدام في الأجسام المتحركة مثل الطائرات بدون طيار أو الروبوتات. وبدورها ، تلقت الأجهزة المحمولة الذكية "العين الثالثة" ، مما يسمح لك بتنفيذ وظائف جديدة بشكل أساسي. علاوة على ذلك ، يعمل IMU مع إطار
ROS (نظام تشغيل الروبوت) ، وبالتالي ، يمكن استخدامه مع جميع منصات الروبوت المتوافقة مع ROS.
تم طلب Intel RealSense D435i الآن
مسبقًا ، وستبدأ الشحنات في 3 ديسمبر ، والسعر الحالي هو 199 دولارًا.