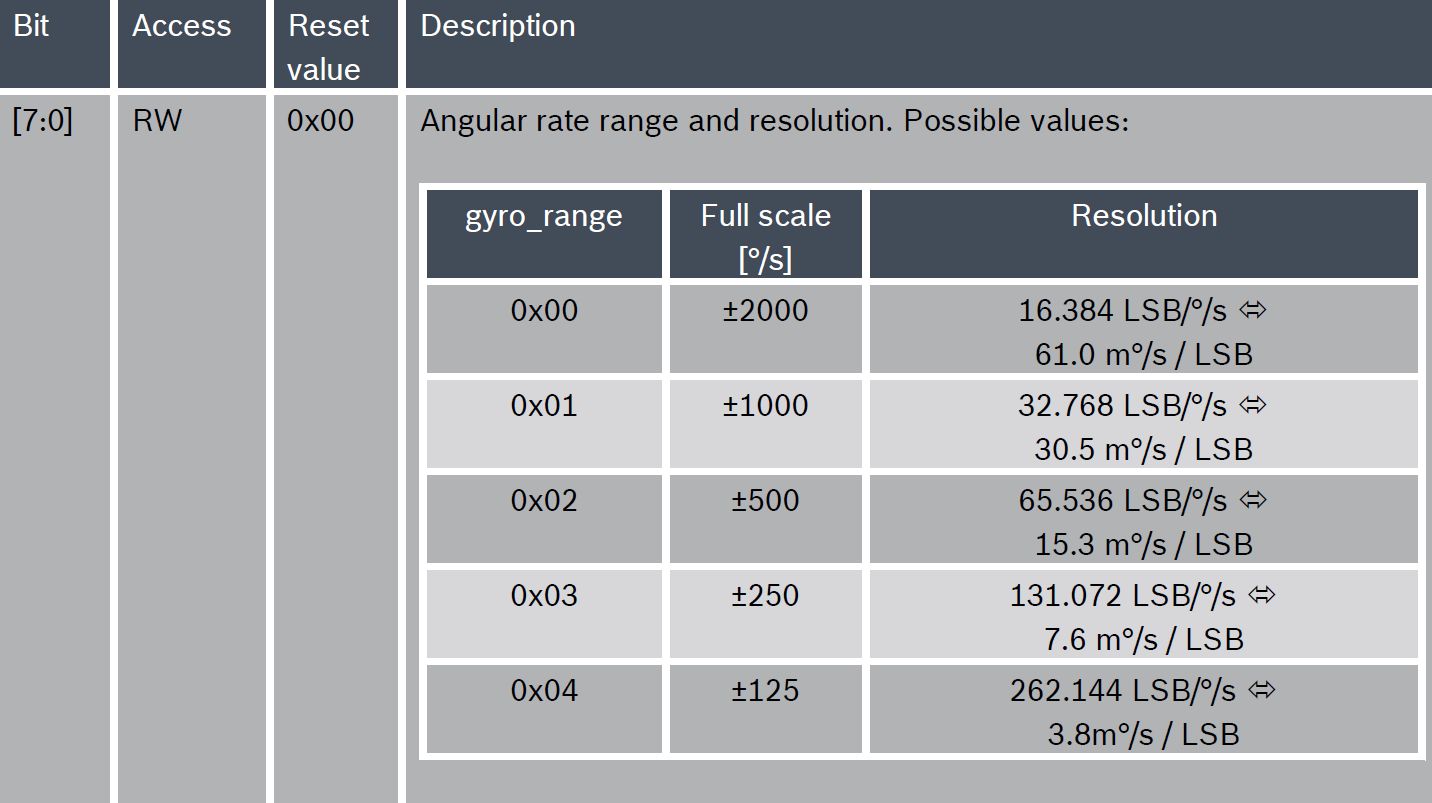
"هيوستن ، لدينا مشاكل" ، جاء صوت متعب في ذهني ، في محاولة للوصول إلى ورقة بيانات InvenSense IMU MPU-9250 في الليل. عندما تكون جميع الكلمات مفهومة بشكل فردي ، إلا أن علاقتها مستحيلة مع الاستحالة. بدأ كل شيء بمعلمة LSB ، التي تذكرت عنها بشكل غامض أنه في الترجمة كانت أقل بت هام. ثم انتقل إلى "Resolution" و "Sensitivity" ، وأدركت أيضًا أن النص الناتج يمكن أن يكون عنوان "ورقة البيانات للدمى" بالفعل.
قليلا عن الكتل الرئيسية للوحدة بالقصور الذاتي.
ممس الجيروسكوب
يتكون MPU-9250 من ثلاثة مجسات مستقلة للسرعة الزاوية الاهتزازية أحادية المحور (جيروسكوبات ممس) تستجيب للدوران حول محاور X- و Y- و Z. تتأرجح كتلتان معلقتان في محاور متقابلة. مع ظهور السرعة الزاوية ، يتسبب تأثير Coriolis في تغيير اتجاه الاهتزاز (
vecFK=−2m[ vec omega times vecvr] وهو ثابت بواسطة جهاز استشعار بالسعة. المكون بالسعة التفاضلية المقاسة يتناسب مع زاوية الحركة [إلكترونيات الوقت]. يتم تضخيم الإشارة الناتجة ، وإزالة تشكيلها وترشيحها ، مما ينتج عنه جهد يتناسب مع السرعة الدورانية الزاوية. يتم ترقيم هذه الإشارة باستخدام ADC 16 بت على متن الطائرة. يمكن أن يتغير معدل العينة برمجياً من 3.9 إلى 8000 عينة في الثانية (العينات في الثانية ، SPS) ، وتوفر المرشحات المنخفضة المرور المحددة من قبل المستخدم (LPF) مجموعة واسعة من ترددات القطع المحتملة. هناك حاجة إلى مرشح تمرير منخفض ، على وجه الخصوص ، لإزالة الاهتزازات من المحركات (كقاعدة عامة ، فوق 20-25 هرتز).
ثلاثة محاور ممس التسارع
يستخدم كتلة اختبار منفصلة لكل محور ، والذي يتحول عندما يحدث تسارع على طول هذا المحور (مثبت بواسطة مستشعرات سعوية). تقلل بنية MPU-9250 التعرض للانجراف في درجات الحرارة والاختلافات في المعلمات الكهربائية. عندما يكون الجهاز على سطح مستو ، سوف يقيس 0g على طول المحورين X و Y و + 1g على طول المحور Z. يتم معايرة
عامل المقياس (
عامل المقياس - نسبة التغير في إشارة الخرج إلى التغير في إشارة الخرج المقاسة) في المصنع ولا يعتمد على جهد التيار الكهربائي. تم تجهيز كل مستشعر بمفرده سيغما-دلتا ADC (يتكون من المغير ومرشح رقمي منخفض التمرير ، والمزيد عن الجهاز في [Easyelectronics]) ، حيث يحتوي الإخراج الرقمي على نطاق قياس قابل للتعديل.
وما يقرب من ثلاثة محاور ممس المغنطيسية
بناء على دقة عالية تأثير قاعة التكنولوجيا. ويشمل ذلك أجهزة استشعار مغناطيسية تحدد شدة المجال المغنطيسي للأرض على طول المحاور ودائرة التحكم ودائرة تضخيم الإشارة ودائرة حسابية لمعالجة الإشارات من كل جهاز استشعار. كل ADC لديه دقة 16 بت ، نطاق القياس
pm4800 muT . لقياس الحقول المغناطيسية الضعيفة ، يتم استخدام وحدة في نظام microtesley SI (μT) أو gauss (G ، GHS system):
1G.=100 muT ، [راديو الطيار]).
فما هو LSB وكيفية حسابها؟ تعليمات الإنتاج
دعنا نقول التسارع لدينا تعمل الآن في نطاق القياس

، وهذا هو ، مجموعة كاملة من القيم الممكنة ستكون
2 cdotFS=4g . يتم ترقيم قيم الجهد المقابل بواسطة ADC ذي 16 بت ، والذي يمكنه تقسيم الفاصل الزمني بأكمله إلى أقصى حد ممكن
216=65536 خطوات. الحد الأدنى للزيادة التي يمكن اكتشافها هو مجرد خطوة واحدة

. هنا يجب أن نتذكر أن الحساب يتم إجراؤه من البداية ، بحيث في الواقع ستكون القيمة القصوى المقاسة
2 cdotFStrue=(216−1)∗LSB=65535∗LSB=2 cdotFS−LSB . أي أنه كلما زاد عدد وحدات البت في كلمة رقمية ADC أو DAC ، كان التناقض أصغر. في هذه الحالة ، سيتم تحديد
حساسية (تسمى أحيانًا عامل المقياس ، عامل مقياس الحساسية) للمستشعر في نطاق معين كنسبة إشارة الخرج الكهربائي والتأثير الميكانيكي. يشار تقليديا لتردد إشارة من 100 هرتز ودرجة الحرارة
T=+25 circC. ل MPU-9250 ، والحساسية هي
216/(2 cdotFS) خطوات لكل ز أو
circ/s (
LSB/g ،
LSB/( circ/s) ) ، بالنسبة إلى IMU آخر ، BMI088 من Bosch Sensortec ، يتم حساب حساسية الدوران بنفس الطريقة ، ويتم استخدام مقياس التسارع
(216−24)/(2 cdotFS) خطوات لكل ز.

نحن نسحب متغيرات FS من مواصفات الجيروسكوبات ، وحتى لا ننهض مرتين ، مقاييس التسارع.

أخذت أيضا FS لمقاييس التسارع من وثائق BMI088 (انظر أدناه).
| جيروسكوب ، 16 بت (2N=65535) | التسارع ، 16 بت (2N=65535) |
|---|
| المدى (FS) circ/s (dps) | LSB ، circ/s (dps) | المدى (FS) ، ز | LSB ملغ |
| مساء125دولا (FS = 250) | 0.004 | مساء2دولا (FS = 4) | 0.06 |
| مساء250دولا (FS = 500) | 0.008 | مساء3دولا (FS = 6) | 0.09 |
| مساء500دولا (FS = 1000) | 0.0015 | مساء4دولا (FS = 8) | 0.12 |
| مساء1000دولا (FS = 2000) | 0،03 | مساء6دولا (FS = 12) | 0.18 |
| مساء2000دولا (FS = 4000) | 0.06 | مساء8دولا (FS = 16) | 0.24 |
| | مساء12دولا (FS = 24) | 0.37 |
| | مساء16دولا (FS = 32) | 0.48 |
| | مساء24دولا (FS = 48) | 0.73 |
كل شيء ، على ما يبدو ، سقط في مكانه ، يمكنك المضي قدمًا. في بعض الحالات (أدناه ، على سبيل المثال ، لقطة من وثائق BMI088) ، تتم الإشارة إلى معلمة مثل الدقة بشكل منفصل.
في الواقع ، يبدو أنه ينبغي أن يكون LSB. ولكن لماذا إذن نرى قيمة واحدة بدلاً من عدة مرتبطة بنطاقات محددة؟ اضطررت إلى توسيع قائمة المصادر التي درست بحثًا عن الإجابات.

ما هو القرار؟
تعد القيمة الدنيا التي يراها المستشعر موثوقًا بها مهمة جدًا عند محاولة تحقيق توازن بين السعر والأداء. هذه ليست دقة - فقد لا يكون المستشعر عالي الدقة دقيقًا بشكل خاص ، تمامًا كما قد يكون للمستشعر منخفض الدقة في مناطق معينة دقة كافية. لسوء الحظ ، يحدد LSB القيمة النظرية الدنيا المميزة فقط ، شريطة أن نتمكن من استخدام كل 16 بت من ADC. هذا هو القرار في العالم الرقمي. في التناظرية ، ستكون بعض الخطوات صاخبة وسيكون عدد البتات الفعالة أقل.
ما هي خصائص الضوضاء وأين يأتي ذلك؟
يمكن تقسيم مصادر الضوضاء بشكل عام إلى ضوضاء إلكترونية لدائرة تحول الحركة إلى إشارة جهد (ضوضاء جونسون الحرارية ، ضوضاء اللقطة ، ضوضاء وميض وردية 1 / f ، وما إلى ذلك) والميكانيكية الميكانيكية (بنية اللون بسبب وجود أجزاء متحركة صغيرة) من المستشعر نفسه. تعتمد خصائص هذا الأخير على تردد الرنين في الجزء الميكانيكي من النظام
f0 (تردد التذبذب الطبيعي للمستشعر
omega0=2 pi/f0 )
ضوضاء RMS على كامل النطاق الطيفي - إجمالي RMS (مربع الجذر المتوسط) الضوضاء
يمكن تحديد مستويات الضوضاء بعدة طرق. يمكنك النظر فيها في الوقت أو نطاق التردد (بعد تحويل فورييه). في الحالة الأولى ، يتم أخذ الضوضاء المتبقية كقيمة جذر متوسط التربيع للإشارات من المستشعر الثابت (في الواقع ، هذا هو الانحراف المعياري لأخذ العينات في
overlinex=0 ) لفترة معينة من الوقت:
xRMS= sigmaX= sqrt sumni=1(xi− overlinex)2 overn−1
التسارع أو السرعات الدورانية الزاوية أقل من مستوى ضوضاء النطاق العريض لا يمكن تمييزها - هذا هو الدقة الفعلية. تساوي قيمة جذر متوسط التربيع لجهد أو تيار متناوب (يشار إليه في الغالب نشطًا أو فعالًا) قيمة إشارة ثابتة تؤدي أفعالها نفس العمل في حمل نشط (مقاوم) خلال الفترة. يكون هذا النهج أكثر فعالية عند تقييم ضوضاء النطاق العريض ، حيث تهيمن الضوضاء البيضاء.
بالنسبة للضوضاء البيضاء ، تكون نسبة السعة (قيمة الذروة الآنية) إلى جذر متوسط التربيع مع احتمال 99.9٪
NPP/NRMS=6.6. وتسمى هذه النسبة عامل التبادل (عامل القمة ، نسبة التبادل). يمكنك اختيار احتمال 95.5 ٪ - سيكون عامل التبادل 4.

في الواقع ، لا تتصرف إشارات الضوضاء بشكل جيد ويمكن أن تنتج قممًا تزيد عامل التصلب إلى 10 مرات. في بعض المواصفات ، يمكنك العثور على القيم
NPP أو المضاعف نفسه.
في نطاق ضيق التردد المنخفض يتراوح بين 0.1 و 10 هرتز ، يلعب الدور الرئيسي ضوضاء وميض "1 / f" ، والتي يتم تقديرها باستخدام سعة إشارة الضوضاء من الذروة إلى الذروة.
الكثافة الطيفية
في بعض الأحيان تكون الإشارة أكثر ملاءمة للنظر في مجال التردد ، حيث يطلق على وصفها
الطيف (اعتماد السعة والمرحلة على التردد). تسمى إحدى الخصائص المحتملة للضوضاء في المواصفات
الكثافة الطيفية للقدرة للضوضاء (PSD) ، أو الكثافة الطيفية للضوضاء ، أو
كثافة طاقة الضوضاء ، أو ببساطة
كثافة الضوضاء ). يصف توزيع قوة الضوضاء على مدى التردد. بغض النظر عن تمثيل الإشارة الكهربائية من خلال التيار أو الجهد ، يمكن تطبيع الطاقة الآنية التي تتبدد على الحمل (R = 1 أوم) ويعبر عنها على النحو التالي
p(t)= nu2(t)/R=i2(t)R=x2(t). متوسط القدرة تبددها الإشارة على مدى فترة من الزمن
(−T/2،T/2)،PTx= frac1T intT/2−T/2x2(t) ،dt.
القوة هي معدل مدخلات الطاقة. يتم تحديد الإشارات المحددة وغير الدورية من خلال الطاقة. يتم التعبير عن الإشارات الدورية والعشوائية من حيث القوة ، لأنها غير محدودة في الوقت ، وبالتالي ، في الطاقة ، وفي أي وقت من الأوقات متوسط قوتها غير صفرية
Px= limT to infty frac1T intT/2−T/2x2(t) ،dt.
يمكنك أن تتذكر [Sklyar] أن الإشارة الدورية التعسفية يتم التعبير عنها من خلال مجموعة من عدد لا حصر له من التوافقيات مع ترددات متزايدة:
x( lambda)= fraca02+ sum inftyn=1(an cosn lambda+bn sinn lambda)،
أنه بعد تمثيل جيب التمام وجيب في شكل الأسي
cos lambda= fracei lambda+e−i lambda2، sin lambda= fracei lambda−e−i lambda2i
والبدائل
lambda= omegat=2 pif0t= frac2 pitT0 يمكن أن يكتب كما
x(t)= fraca02+ frac12 sum inftyn=1[(an−ibn)ein omegat+(an+ibn)e−in omegat]= sum inftyn=− inftycnein omegat،
أين هي المعاملات المعقدة (المكونات الطيفية) من سلسلة فورييه ل
x(t) ،
عرض $$ $$ \ تبدأ {equation} c_n = \ frac {1} {T_0} \ int ^ {T_0 / 2} _ {- T_0 / 2} x (t) e ^ {- in \ omega t}، dt = \ تبدأ {الحالات} \ frac {1} {2} (a_n-ib_n) ، & n> 0 \\ \ frac {a_0} {2} ، & n = 0 \\ \ frac {1} {2} ( a_n + ib_n) ، & n <0 \ end {cases} \ end {equation} $$ عرض $$
في الحالة العامة ، يمكن تمثيل هذه المعاملات على النحو التالي:
cn=|cn|ei thetan،
|cn|= frac12 sqrta2n+b2n، thetan= arctan left( fracbnan right)،b0=0،c0= fraca02.
تسمى طيف السعة والمرحلة بالرسوم البيانية التبعية.
|cn| و
thetan من التردد. الكثافة الطيفية للقدرة

إشارة دورية
x(t) يعطي توزيع طاقة الإشارة على مدى تردد:
PSD(f)= sum inftyn=− infty|cn|2 delta(f−nf0)
ولديه البعد
[W/Hz]=[x2/Hz]. سيكون متوسط قوة تطبيع الإشارة الفعلية
Px= int infty− inftyPSD(f)،df.
يمكن وصف الإشارات العشوائية غير الدورية (خاصة الضوضاء) بأنها دورية بالمعنى المحدد. إذا
T0دولا يميل إلى ما لا نهاية ، تسلسل الدوافع يتحول إلى دفعة منفصلة
x(t) ، عدد الخطوط الطيفية يميل إلى ما لا نهاية ، يتحول الرسم البياني للطيف إلى طيف تردد سلس
X(f). في هذه الحالة المقيدة ، يمكننا تحديد زوج من تحويلات فورييه المدمجة
X(f)= int infty− inftyx(t)e−i2 pift،dt
و
x(t)= int infty− inftyX(f)ei2 pift،df،
اين
X(f) - صورة فورييه.
يتم تحديد الكثافة الطيفية للقدرة لإشارة عشوائية من خلال الحد
PSD(f)= limT to infty frac1T|XT(f)|2.
ويصف توزيع قوة الإشارة في نطاق التردد.
بما أننا نفترض أن متوسط الضوضاء البيضاء لأجهزة الاستشعار في حالة ثابتة هو صفر (
overlinex= overlinex2=0 ) ، عندئذٍ تساوي قيمة مربع قيمة جذر متوسط التربيع التباين وتمثل إجمالي الطاقة في الحمل الطبيعي:
Noise2RMS= sigma2x=Px= int infty0PSD(f)،df= intBandwidth0PSD(f)،df=PSD(Badnwidth−0)
NoiseRMS= sqrtNoiseDensity timesBandwidth
نحن ننظر في المواصفات - هناك ، في الواقع ، يتم الإشارة إلى الجذر التربيعي لها مع البعد المقابل تحت اسم الكثافة الطيفية
[ circ/s/ sqrtHz] او
[ mug/ sqrtHz]. أي أن قيمة ضوضاء RMS دون الإشارة إلى نطاق التردد الذي تمت قراءته (النطاق الترددي) لا معنى لها.
أكثر قليلا عن اختيار عرض النطاق الترددي
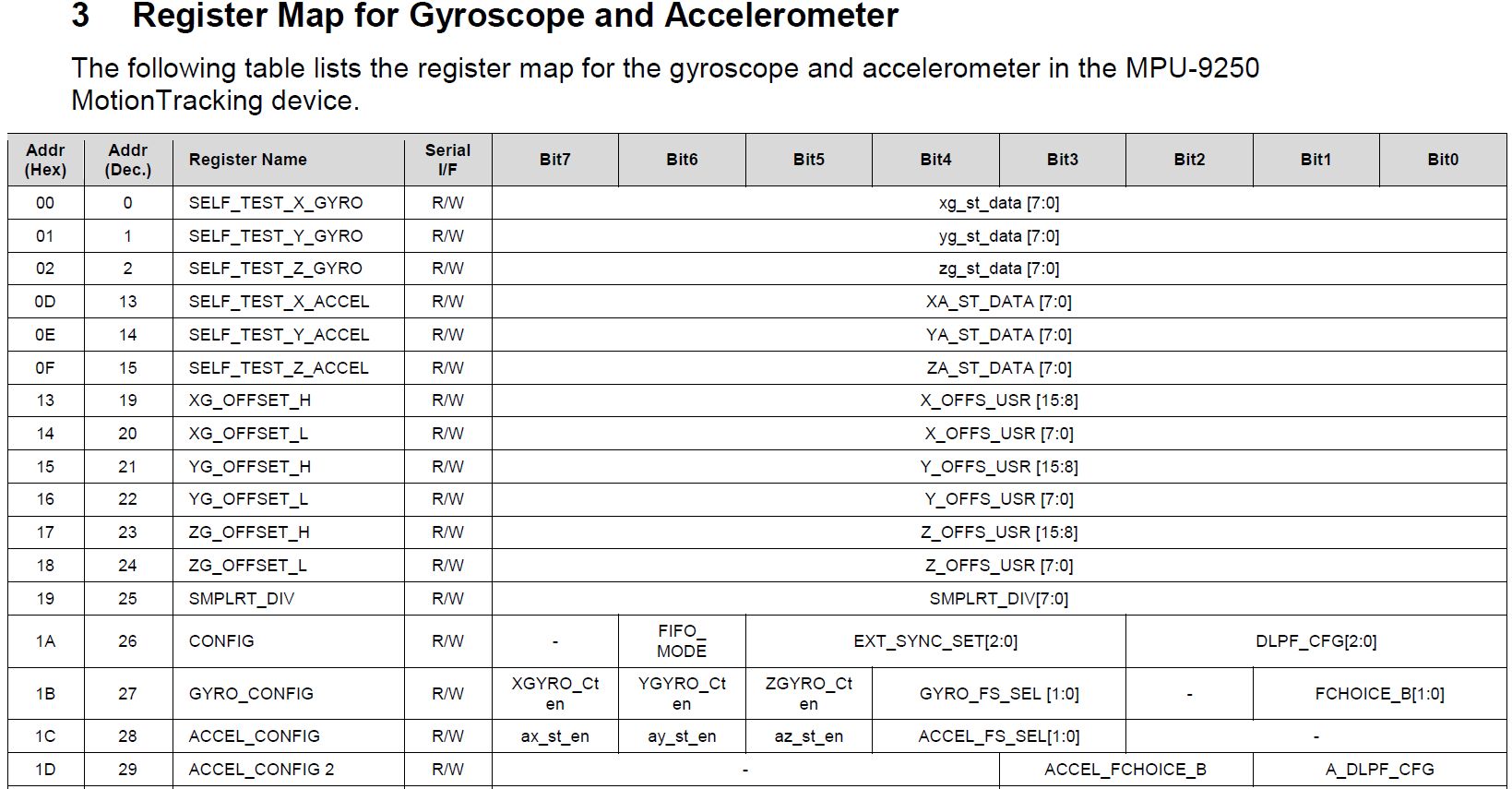
عند إخراج مستشعر MEMS ، نحصل على إشارات ترددات مختلفة. من المفترض أن لدينا فكرة معينة عن العمليات التي نقيسها مسبقًا. على سبيل المثال ، عند تحديد متجه تسارع طائرة بدون طيار ، فإن الضوضاء هي اهتزاز الجهاز. يمكنك فصلهم عن الإشارة المفيدة باستخدام مرشح تمرير منخفض يقطع جميع الترددات فوق التردد المحدد (على سبيل المثال ، 200 هرتز). يوفر MPU-9250 القدرة على ضبط تردد القطع للمرشح المنخفض المرور باستخدام المعلمة باسم السحر
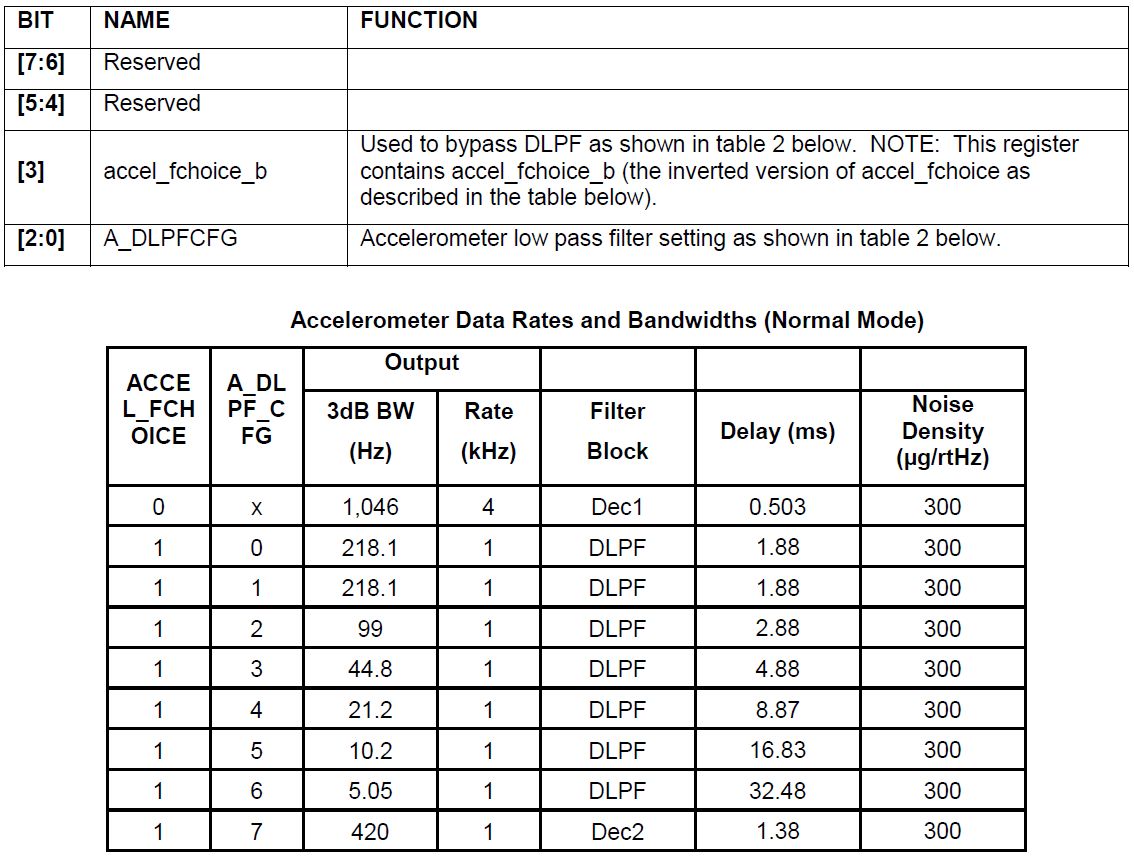
DLPFCFG . لتقف على تكوين مرشح تمرير منخفض الرقمي. علاوة على ذلك ، ظهرت على السطح هنا وهناك تعبيرات أقل غموضًا من النوع (DLPFCFG = 2 ، 92 هرتز) ، لكن من أجل فك التشفير ، اضطررت إلى الصعود إلى وثيقة أخرى ، "سجل الخريطة والأوصاف". يعرض مجموعات البتات التي يجب أن تدون فيها السجلات لتحقيق التأثيرات المطلوبة:
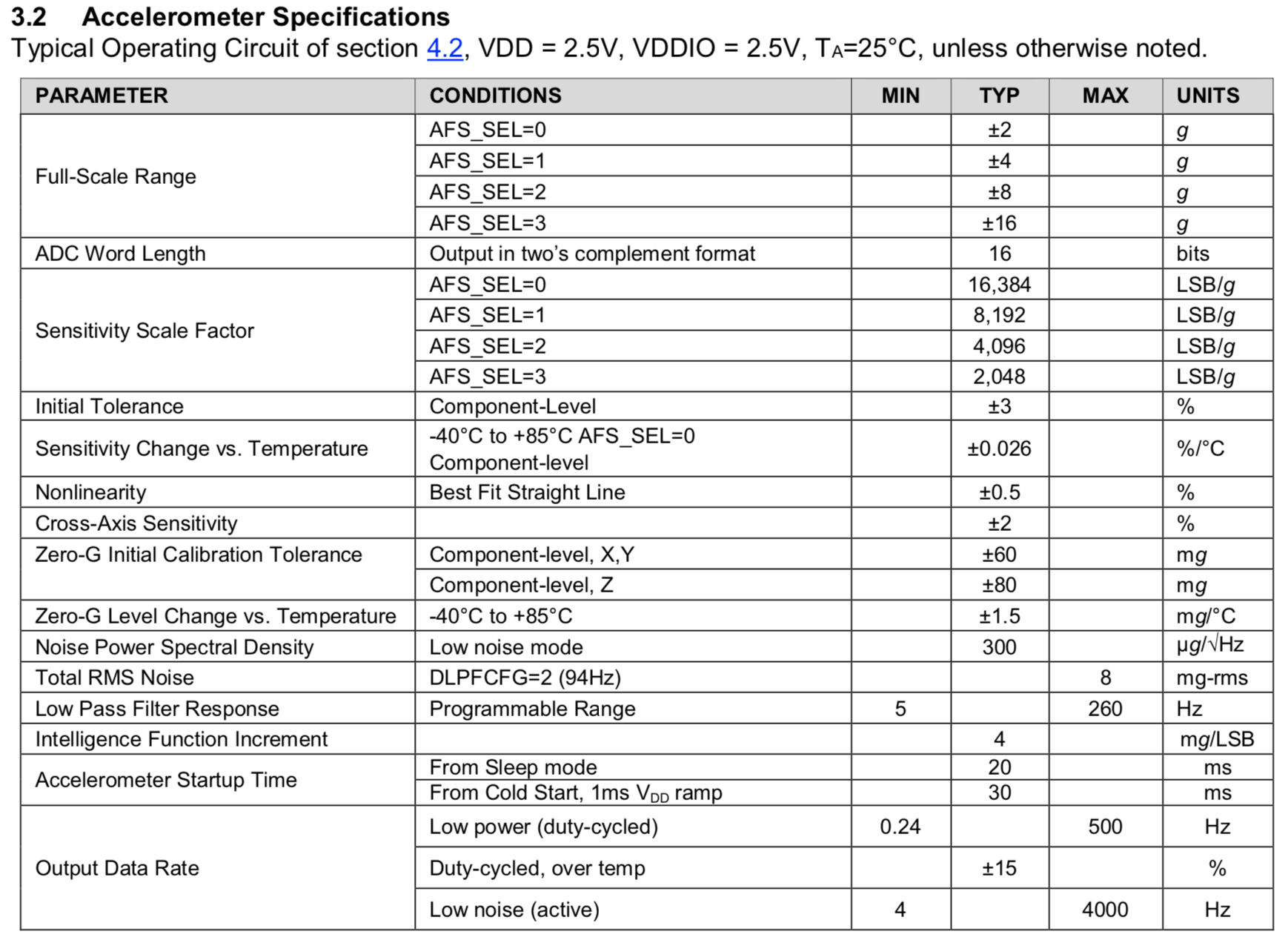
حذف التفاصيل الفنية من التكوين ، يمكن أن يقال ما يلي. في هذا المستشعر ، يتم إجراء تصفية قابلة للتخصيص لقراءات مقاييس التسارع ، الجيروسكوبات ، ولكن أيضًا مستشعر درجة الحرارة. لكل منها ، هناك ما مجموعه 7 إلى 10 وسائط ، تتميز بمفاهيم مثل عرض النطاق الترددي في هرتز ، والتأخير في مللي ثانية ، وتيرة أخذ العينات (Fs) في كيلو هرتز.

عمود "كثافة الضوضاء" في
mug/rtHz= mug/ sqrtHz ، وتم استكمال عمود "النطاق الترددي" بالقيمة "3dB".
الأمر ليس أسهل ، لذا دعنا نذهب مباشرة إلى القائمة.
تراث روما القديم
معدل أخذ العينات + هلاك Delta Sigma ADC = معدل بيانات الإخراج الرقمي (ODR)مع تردد أخذ العينات (هو تردد أخذ العينات) ، كل شيء واضح - هذا هو عدد نقاط إشارة وقت مستمر تؤخذ في الثانية أثناء أخذ العينات من قبل ADC. تقاس في هيرتز.
Fs= frac1 deltat
من أجل الحصول على قيمة قريبة من ذروة السعة للإشارة ، من المهم أن تأخذ تردد أخذ العينات ما لا يقل عن 10 أضعاف تردد الإشارة المفيدة. يوفر MPU-9250 ثلاثة خيارات: Fs = 32 كيلو هرتز ، 8 كيلو هرتز ، 1 كيلو هرتز.
لكن هذا لا يعني على الإطلاق أن الإشارة عند إخراج مقياس التسارع أو الجيروسكوب تظهر في نفس الفترة.
إذا كنت تأخذ نفس الطائرات بدون طيار ، فإن كل شيء يعتمد على الكفاح من أجل تقليل استهلاك الطاقة ، وزيادة سرعة العمليات الحسابية وتقليل ضوضاء بيانات المخرجات. يمكنك تقليل تكرار تحديث بيانات المخرجات من خلال السماح للخوارزميات الداخلية بدمج معلومات الإدخال على مدار فترة زمنية. ستنخفض قيمة RMS ، ولكن سيتم أيضًا تقليل عرض النطاق الترددي (يمكن للمستشعر اكتشاف تلك العمليات التي سيكون ترددها أقل من 50٪ من معدل تحديث البيانات).
من الأفضل هنا أن نتذكر
نظرية Kotelnikov على الفور. إنها تعد بأنه عند أخذ إشارة إشارة تمثيلية ، يمكن تجنب فقد المعلومات (أي استعادة الإشارة دون تشويه) إذا كان تردد الإشارة المفيدة لا يزيد عن نصف تردد أخذ العينات ، ويسمى أيضًا
تردد Nyquist . في الممارسة العملية ، يتطلب مرشح مكافحة التعرجات الكلاسيكي (مرشح تمرير منخفض يقلل من مساهمة مكونات التردد الثانوية في إشارة الخرج إلى المستويات التي لا تذكر - GOST R 8.714-2010) اختلافًا لا يقل عن 2.5 مرة [Siemens].
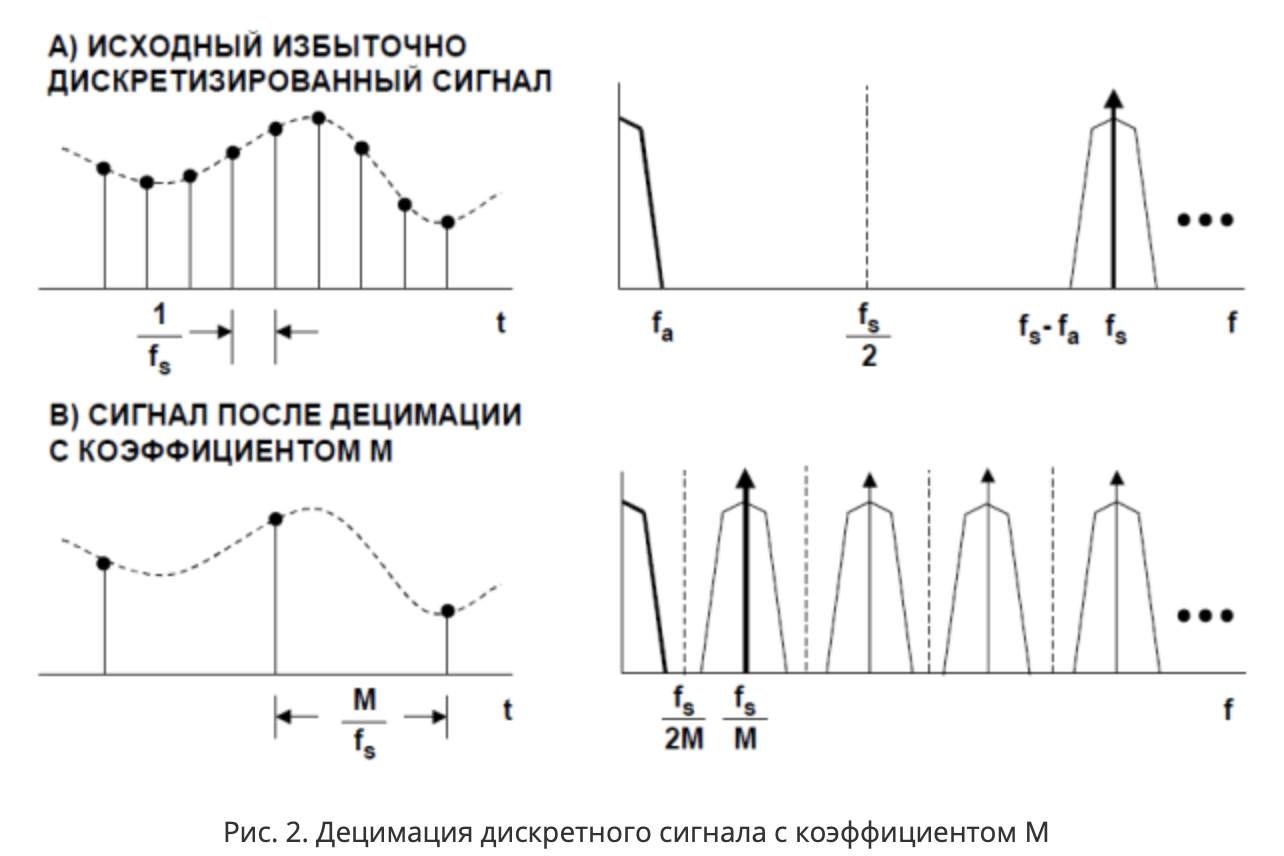
بالنسبة إلى Fs = 32 كيلو هرتز ، سيكون تردد Nyquist 16 كيلو هرتز. في الوقت نفسه ، من غير المرجح أن تتجاوز الإشارة المفيدة النطاق fa = 20Hz (قليل يمكن أن يغير اتجاه الحركة أكثر من 20 مرة في الثانية). في المجموع ، يكون تردد أخذ العينات أعلى بكثير من التردد المطلوب لتخزين المعلومات الموجودة في نطاق fa (40Hz ، 400 مرة) ، أي أن الإشارة المفيدة يتم تجاوزها. لا يحتوي النطاق بين الترددات fa و fs-fa على أي معلومات مفيدة. يمكنك تقليل معدل أخذ العينات (في المخطط تم ذلك باستخدام المعامل M ، [7]) من خلال تخفيف تسلسل العينات (العينات). وتسمى هذه العملية
هلاك .
وفقا للمواصفات على MPU-9250 ، تم تجهيز مقاييس التسارع مع
ADC سيغما دلتا . المخططات القائمة عليها تستهلك الحد الأدنى من الطاقة. تجدر الإشارة إلى أن عرض النطاق الترددي لهذه المحولات ضيق للغاية ، ولا يتجاوز نطاق الصوت [Easyelectronics] ، لكن بالنسبة إلى quadrocopter القياسي ، فليس من الضروري. وهي تتألف من كتلتين:
سيجما دلتا -Modulator و الرقمية هدم مرشح تمرير منخفض.
لماذا الجمع بين مرشح تمرير منخفض وهلاك؟
مقتطفات صادقة من ويكي:
إذا كانت الإشارة الأصلية لا تحتوي على ترددات أعلى من تردد Nyquist للإشارة العشرية ، فإن شكل الطيف للإشارة المستقبلة (المنقوصة) يتزامن مع جزء التردد المنخفض من طيف الإشارة الأصلية. يكون معدل أخذ العينات المطابق لتسلسل أخذ العينات الجديد أقل بـ N مرة من تردد أخذ العينات للإشارة الأصلية.
إذا كانت الإشارة الأصلية تحتوي على ترددات أعلى من تردد Nyquist للإشارة العشرية ، فإن النتيجة ستؤدي إلى التعرجات (تراكب الأطياف).
وبالتالي ، للمحافظة على الطيف ، من الضروري ، قبل الهلاك ، الإزالة من ترددات الإشارة الأصلية أعلى من تردد Nyquist للإشارة العشرية. لا تحتوي مواصفات MPU-9250 على الكثير من المعلومات حول خصائص DLPF ، ولكن يمكن البحث عن المتحمسين [9].
عرض النطاق الترددي ، هو استجابة التردد (استجابة التردد)
نطاق التردد الذي يكتشف فيه المستشعر الحركة ويوفر إشارة خرج صالحة. في بعض المواصفات ، يتم توفير استجابة تردد المستشعر - اعتماد المخرج الكهربائي لمقياس التسارع على الضغوط الميكانيكية الخارجية بسعة ثابتة ولكن بترددات مختلفة. ضمن عرض النطاق الترددي ، لا يتجاوز تفاوت استجابة التردد قيمة معينة. في حالة استخدام مرشح رقمي منخفض التمرير ، يتيح لك خيار عرض النطاق الترددي فقط تغيير تردد القطع ، مما يؤثر حتماً على سرعة استجابة المستشعر للتغيرات في الموقع في الفضاء. يجب أن يكون تردد القطع أقل من نصف معدل بيانات الإخراج الرقمي (ODR) ، وتسمى أيضًا تردد Nyquist.
بالنسبة لمقاييس التسارع MPU-9250 ، يتم تحديد حدود عرض النطاق بحيث لا تختلف الكثافة الطيفية للإشارة عن الذروة (بتردد 0 هرتز) في حدود dB 3. يتوافق هذا المستوى تقريبًا مع انخفاض إلى نصف الكثافة الطيفية (أو 70.7٪ من السعة الطيفية القصوى). اسمحوا لي أن أذكرك ، بالنسبة لكميات الطاقة (الطاقة ، الطاقة ، كثافة الطاقة) التي تتناسب مع مربعات شدة المجال ، معبراً عنها بالديسيبل ، النسبة
DP=10 lgP2 overP1
.
الخلاصة: الإشارات التي مرت بمرشاح تمرير منخفض أقل ضوضاءً ، ولديها دقة أفضل ، ولكن نطاق ترددي أقل.
لذلك ، فإن تحديد الدقة في المواصفات دون الرجوع إلى النطاق الترددي لا معنى له.العودة إلى القرار
في مواصفات MPU-9250 ، لا توجد معلومات حول القرار بشكل أساسي ، حيث يتم تقديم مؤشر كتلة الجسم BMI088 تحت اسم "الدقة" الدقة الرقمية (LSB) والحساسية ":
يمكن تقدير دقة كل عرض نطاق بالضوضاء القصوى.
Noisepk−pk=إجماليالضوضاءRMS الأوقاتCrestFactor=إجماليالضوضاءRMS times4. يرتبط متوسط قيمة الجذر التربيعي للضوضاء عند الخرج بالكثافة الطيفية المشار إليها في المواصفات (أو بالأحرى جذرها) وعرض النطاق المكافئ للضوضاء (عرض نطاق الضوضاء المكافئ ، ENBW) هو عرض نطاق النظام المكافئ الذي له استجابة تردد مستطيلة ونفس القيمة عند التردد الأصلي للنظام الأصلي وتشتت عند الإخراج ، عندما تتعرض لمدخلات أنظمة الضوضاء البيضاء):
NRMS=PSD times sqrtENBW
ويتصل عرض النطاق الترددي للضوضاء بالنطاق ثلاثي الأبعاد بواسطة المعاملات المقابلة لترتيب مرشح تمرير منخفض:
ENBW=1.57 cdotf3dB textrmللترتيبالأول
ENBW=1.11 cdotf3dB textrmللترتيبالثاني
ENBW=1.05 cdotf3dB textrmللترتيبالثالث
ENBW=1.025 cdotf3dB textrmللترتيبالرابع
اذا حكمنا من خلال الدراسة في [MPU9250_DLPF] ، فإن خيارنا هو 1.57. تأخذ قيمة جذر متوسط التربيع المتحصل عليها في الاعتبار مساهمة الضوضاء البيضاء (لا يوجد ضوضاء تكميمية أو ضوضاء ميكانيكية هناك). على سبيل المثال ، بالنسبة لمقياس التسارع ، القيمة المحسوبة لـ

اتضح
NRMS=4mg . في هذه الحالة ، تحتوي المواصفات على إجمالي ضوضاء rms

التناقض كبير. لسوء الحظ ، يشار إلى نطاق واحد فقط ، ومقياس التسارع BMI088 ، يشار إلى PSD فقط في المواصفات. لذلك سوف نستخدم ما هو. خذ العامل المشترك 4. الآن الأكثر إثارة للاهتمام. الموقف
FS/Noisepk−pk سيعطي ترتيبًا تقريبيًا للبتات الفعالة في نطاق القياس هذا ، وهو أقل من دقة 16 بت من ADC.
| MPU-9250 | BMI088 |
|---|
| جيروسكوب |
|---|
| smallNTotalRMS=0.1 circ/s(BW=92Hz) | smallNRMS=0.1 circ/s(BW=47Hz) |
|---|
| smallPSD=0.01 circ/s/ sqrtHz | smallPSD=0.014 circ/s/ sqrtHz |
|---|
| صغيرBW،هرتز | smallNRMS، circ/s−rms | smallNPP، circ/s | صغيرBW،هرتز | smallNRMS، circ/s | smallNPP، circ/s |
| | | 523 | 0.41 | 1.6 |
| 250 | 0.2 | 0.8 | 230 | 0.27 | 1.1 |
| 184 | 0.17 | 0.69 | 116 | 0.19 | 0.76 |
| 92 | 0.12 | 0.49 | 64 | 0.14 | 0.57 |
| 41 | 0.08 | 0.32 | 47 | 0.12 | 0.49 |
| 20 | 0.06 | 0.23 | 32 | 0.1 | 0.4 |
| 10 | 0.04 | 0.16 | 23 | 0.09 | 0.34 |
| 5 | 0.03 | 0.11 | 12 | 0.06 | 0.25 |
| التسارع |
|---|
| smallNTotalRMS=8mg textrm(BW=99Hz) | smallPSDXY=160 mug/ sqrtHz |
|---|
| smallPSD=300 mug/ sqrtHz textrm(Gyrooff) | صغيرPSDZ=190 mug/ sqrtHz(gFS3g، textrmNormalmode) |
|---|
| صغيرBW،هرتز | صغيرNRMS،mg | صغيرNPP،mg | صغيرBW،هرتز | smallNRMSXY،mg | smallNPPXY،mg |
| 218.1 | 5.6 | 22 | 280 | 3.4 | 14 |
| 99 | 3.8 | 15 | 145 | 2.4 | 10 |
| 44.8 | 2.5 | 10 | 80 | 1.8 | 7 |
| 21.2 | 1.7 | 7 | 40 | 1.3 | 5 |
| 10.2 | 1.2 | 4.9 | 20 | 0.9 | 4 |
| 5.05 | 0.9 | 3.4 | 10 | 0.6 | 2.6 |
| 420 | 7.8 | 31 | 5 | 0.5 | 1.8 |
| 1046 | 12.3 | 49 | | | |
التأخير (مللي ثانية) ، أو من أين يأتي التأخير
بسبب الحاجة إلى تخزين المتغيرات في المخزن المؤقت الداخلي لتقسيم الإشارة على المرشح على ترددات مختلفة
المجموع كلما انخفض تردد القطع للمرشح ، قل مستوى الضوضاء في الإشارة. ولكن هنا يجب أن نكون حذرين ، لأنه في الوقت نفسه ينمو التأخير. بالإضافة إلى ذلك ، يمكنك تخطي الإشارة المفيدة [8].
| MPU-9250 | BMI088 |
|---|
| جيروسكوب ، 16 بت |
|---|
| المدى (FS) circ/s (dps) | القرار ، بت (BW = 92Hz) | المدى (FS) circ/s (dps) | القرار ، بت (BW = 64Hz) |
| | مساء125دولا | 8 |
| مساء250دولا | 9 | مساء250دولا | 9 |
| مساء500دولا | 10 | مساء500دولا | 10 |
| مساء1000دولا | 11 | مساء1000دولا | 11 |
| مساء2000دولا | 12 | مساء2000دولا | 12 |
| التسارع |
|---|
| المدى (FS) ، ز | القرار ، قليلا (NPP=32mg) | المدى (FS) ، ز | القرار (س ، ص) ، بت (NXPPY=14mg) |
| مساء2دولا | 6 | مساء3دولا | 8 |
| مساء4دولا | 7 | مساء6دولا | 9 |
| مساء8دولا | 8 | مساء12دولا | 10 |
| مساء16دولا | 9 | مساء24دولا | 11 |
وهذه مجرد المعلمات الأساسية.
من أين جاء هذا؟
- المستند الأكثر إمتاعًا من Freescale Semiconductor هو "كم عدد القطع يكفي؟"
- [EE] - "الدقة مقابل الدقة مقابل الحساسية عبر الارتباك"
- [إلكترونيات الوقت] - "أجهزة استشعار الحركة ممس من STMicroelectronics: التسارع والجيروسكوبات"
- [LSB] - "بت ADC و DAC الأقل أهمية (LSB)"
- [حوسبة القياس] - "TechTip: الدقة ، الدقة ، الدقة ، والحساسية"
- [KIT] - "أجهزة قياس تسارع الأجهزة التناظرية - الجهاز والتطبيق"
- [Easyelectronics] - "Sigma-Delta ADC"
- [Radiolotsman] - "أجهزة قياس المغنطيسية: مبدأ التشغيل ، تعويض الأخطاء"
- [SO] - "قياس الضوضاء"
- [Mide] - "مواصفات التسارع: فك شفرة ورقة بيانات مقياس التسارع"
- [CiberLeninka] - دلتا سيغما مرشح ADC
- [SciEd] - "ميزات تنفيذ التصفية الرقمية مع تغيير في تردد أخذ العينات"
- [MPU6050] - "استخدام DLPF الخاص بـ MPU6050"
- [MPU9250_DLPF] - التحقيق في عمل MPU9250 Gyro Noise DLPF
- فهم مواصفات قرار الاستشعار
- سيمنز معالجة الإشارات الرقمية
- أجهزة استشعار الحركة ممس من STMicroelectronics
- [TMWorld] - "تقييم وحدات القياس بالقصور الذاتي"
- [Sklyar] - الاتصالات الرقمية Sklyar B. الأسس النظرية والتطبيق العملي.