مرحبا بالجميع!
مسألة التنمية الجسدية لأطفالهم هي دائما ذات الصلة. كان الابن الأصغر يبلغ من العمر ثلاث سنوات ، بالإضافة إلى المشي ، وأراد أن يجد دروسًا له بانحياز رياضي. نظرًا لأنه مهتم بأنواع مختلفة من النقل ، فقد وقع الاختيار بشكل طبيعي على الدراجة الهوائية. وبعد مشاهدة مقاطع الفيديو الحارقة ، بينما كان الأطفال الأكبر سناً يعتنقون الدراجات الهابطة ، قررت التحقيق في هذه المسألة بمزيد من التفصيل. بعد أن أصبحت مسلحًا بوحدة IMU من Amperka في 10 درجات من الحرية ، و Raspberry Zero W مزود بمصدر الطاقة و 40 سطرًا من التعليمات البرمجية في Python ، ذهبت إلى مدرسة ركض. ما جاء منه - انظر تحت القطع)

الدراجات الهوائية ليست واسعة الانتشار مثل الدراجات أو الدراجات البخارية للأطفال ، ولكنها تتمتع بالعديد من المزايا مقارنة بوسائل النقل الأخرى. يمكن للطفل أن يجلس على السرج ، مثله على دراجة ويدفع بساقين بالتناوب. وهذا يعطي حمولة أكثر اتساقا على كلا الساقين والظهر. على عكس سكوتر ، حيث تعمل ساق واحدة فقط. المكافأة الإضافية هي أن الطفل يتعلم التوازن. أي أنه من المفترض أن يحدث مزيد من النقل إلى دراجة ذات عجلتين دون أي مضاعفات.
في الأساس ، فإن تصاميم الدراجات النارية بسيطة للغاية. هذا هو إطار معدني (الألومنيوم أو الفولاذ) ، عجلة القيادة ، سرج وعجلتين (ضخها لنماذج أكثر تكلفة أو مصنوعة من المطاط الرغوي). هناك نموذجان مع نظام تعليق خلفي.

بدا لي التخميد من العجلة الخلفية تفاصيل مهمة بشكل خاص. سوف يقفز الطفل على دراجته حتما القيود ويركب على الطرق الوعرة (نحن نعيش في روسيا). لذلك ، فإن وجود المثبط يجب أن يقلل من الناحية النظرية الحمل على الظهر. في المستقبل ، مع نمو الكفاءة المهنية للمتسابق الشاب ، سيسمح لك المثبط أيضًا بعمل
قفزات وحيل أخرى مماثلة .
بعد البحث عن طريق الإنترنت ، وجدت أنه لم يسبق لأحد أن حدد الأحمال التي تقع على إطار الدراجة عند القفز من مختلف العقبات. أدى الاهتمام في هذه المسألة وكمية صغيرة من وقت الفراغ إلى حقيقة أنني جمعت من المواد في متناول اليد اختبار بسيط.
سيتم قياس التسارع باستخدام مقياس التسارع ثلاثي المحاور من
مستشعر IMU الذي تصنعه Amperka. لا يمكن استخدام مقياس تسارع الهواتف المحمولة لقياس التسارع نظرًا لحد القياس المنخفض (+ -2G). نطاق القياس لكل من محاور وحدة Amperka هو + -8G ، دعونا نأمل أن يكون هذا كافياً.
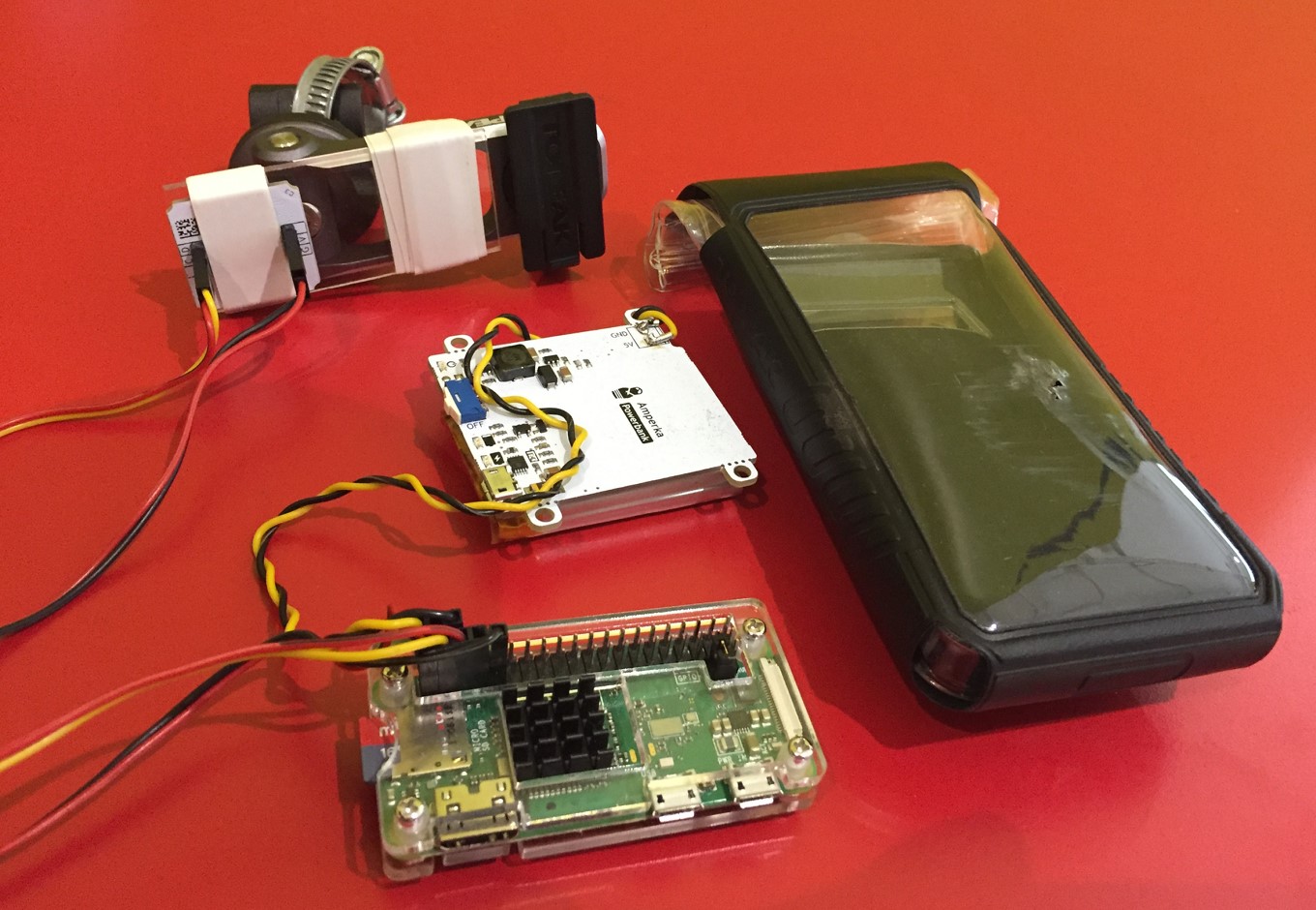
تم ربط مستشعر IMU بالإطار باستخدام حامل Topeak (اضطررت إلى إزالته مؤقتًا من دراجتي) ، وقطعة من زجاج شبكي وعدة طبقات من الشريط الكهربائي. تم استخدام Raspberry Pi Zero W على السبورة واحدة لاستطلاع المستشعر ، حيث قام برنامج Python صغير باستطلاع مقياس التسارع خلال فترة تبلغ حوالي 10 مللي ثانية:
imu.pyimport time from pytroykaimu import TroykaIMU imu = TroykaIMU() imu.accelerometer.set_range('8G') file_name = '' print(' ( )') file_name = str(input ()) file_name = file_name + '.csv' print(' , Ctrl+C') t0 = time.time() imu_array = [] while True: try: ax, ay, az = imu.accelerometer.read_gxyz() gx, gy, gz = imu.gyroscope.read_radians_per_second_xyz() imu_array += [time.time(), ax, ay, az, gx, gy, gz] time.sleep(0.006) except KeyboardInterrupt: t1 = time.time() lines = int(len(imu_array)/7) print(" - -", lines, '- ', file_name) imu_file = open(file_name, 'w') imu_file.write('time,ax,ay,az,gx,gy,gz' + '\n') for i in range(lines): imu_file.write(str(imu_array[7*i]) + ',' + str(imu_array[7*i+1]) + ',' + str(imu_array[7*i+2]) + ',' + str(imu_array[7*i+3]) + ',' + str(imu_array[7*i+4]) + ',' + str(imu_array[7*i+5]) + ',' + str(imu_array[7*i+6]) + '\n') imu_file.close() print (' , -', t1 - t0, '') break
تمت إزالة Power Raspberry من
Power Bank من نفس Amperka ، وقد بدأت من بعيد باستخدام خلية مثبتة عليه محطة غير مثبتة عليه. أخفيت اللوحة أحادية مزودًا بمصدر طاقة في علبة للهاتف الخلوي ، وقمت بتوصيل مستشعر IMU بمقعد الدراجات الهوائية المدروسة كما يلي:

أخذنا قياسات مع Evgeny Ivanov من
مدرسة BegovelMsk في موسكو . قدمت مدرسة الجري للاختبار بلطف دراجتين (
Puky LR Ride و
Early Rider Trail Runner 14 ). هذان النموذجان شائعان في مدارس الركض ، الأول - بشكل أساسي للحيل ، والثاني - لتشغيل الدراجات. تم تضخيم إطارات كلا النموذجين لحوالي 3.5 أجواء.
يتألف الاختبار من حقيقة أن المتسابق Artyom قفز من نقطة انطلاق صغيرة على دراجة الجري التي تم اختبارها:

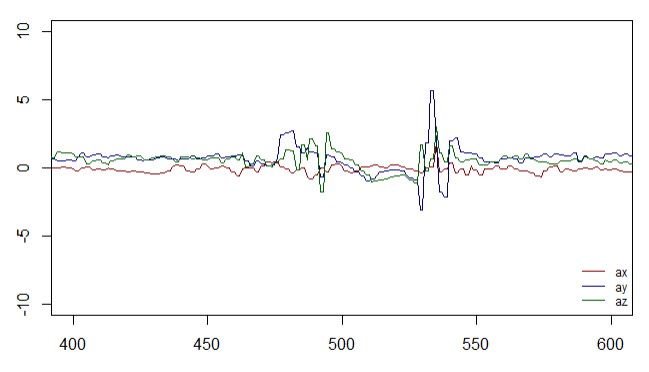
نتيجة لذلك ، في كل قفزة على بطاقة SD ، قام Raspberry بتسوية ملف باستطلاعات من جميع المحاور الثلاثة لمقياس التسارع كل 10 مللي ثانية. يمكن اشتقاق مثل هذا الرسم البياني من كل ملف ؛ يتم رسم التسارع في G على طول المحور العمودي:
اتضح أن الرسوم البيانية للقفزات المشابهة متشابهة إلى حد كبير ، لكن منحنيات التسريع للطرازين المدروسين من الدراجات النارية مختلفة جداً. لتبسيط الصورة ، يتم رسم المكونات الرأسية فقط من التسارع في الرسم البياني التالي (لتجربتنا ، هذا هو المحور Y مقسومًا على جيب التمام لزاوية الانحراف عن العمودي). يوضح الرسم البياني أيضًا وقت الوصول على المنصة (التي يتم تحديدها بواسطة الفيديو الخاص بالسباقات) ووقت لمس الأرضية بعد القفزة (هذه هي أقصى إشارة في السعة).
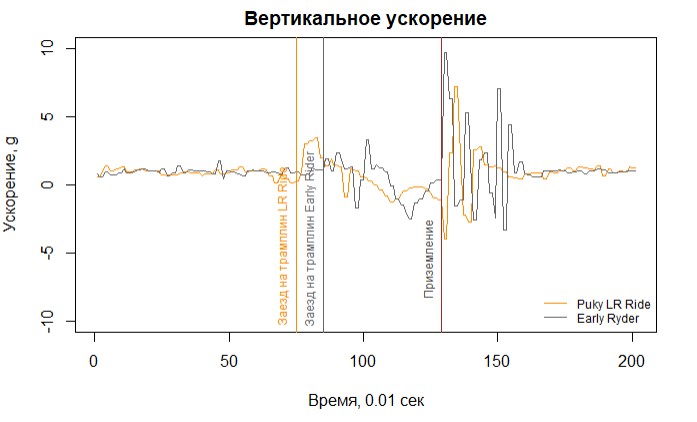
كما ترون ، فإن الإطار يعمل (ومعه الطفل) عند القفز من نقطة انطلاق ، فإنه يواجه حمولة صدمة قصيرة المدى تصل إلى 10G! بشكل غير متوقع اعتقدت أن الحمل كان أقل من ذلك بكثير. يمكن أن نستنتج أنه لا يستحق الجري أسفل الرصيف أثناء الجلوس كنقطة خامسة على السرج. خلاف ذلك ، سوف تقع ضربة على العمود الفقري والأعضاء الداخلية للطفل. سيكون من الأمثل نقل هذا الحمل إلى الساقين. لذلك ، بالنسبة لنموذج Puky LR Ride ، تتوفر
خطوة خاصة ، حيث يصبح الطفل قدمًا عند أداء الحيل.

ما هي الاستنتاجات الأخرى التي يمكن استخلاصها من هذه المنحنيات؟ تقريبا ما يلي:
- يعمل المثبط الموجود على LR Ride على تقليل حمل الصدمات على إطار العداء بنسبة 30٪ تقريبًا (على الأرجح أكثر ، لأن مقياس التسارع يشبع على إطار Trail Runner 14 الصلب). كذلك ، فإن طبيعة الزيادة في تغييرات الحمل ، تصبح أكثر سلاسة من النموذج دون المثبط.
- يساعد المثبط على زيادة مسافة القفزة ، حيث يمكن للطفل استخدامها كنوع من الربيع أمام لوحة الغوص (انتبه إلى منحنى البرتقال قبل الدخول إلى لوحة الغوص).
- يثبط المثبط الاهتزازات المتبقية في إطار دراجة التشغيل ، ويمكن استبداله بعد القفزة LR Ride وهي أصغر بكثير من Trail Runner 14 ، سواء من حيث الوقت أو السعة. هذا يحسن من التعامل مع runbike وراحة المتسابق.
تم الحصول على هذه النتائج المثيرة للاهتمام بشكل غير متوقع من تجربة واحدة بسيطة. في النهاية ، أعرب مرة أخرى عن امتناني لمدرسة الجري والفارس أرتيوم والمدرب
إيفجيني إيفانوف .

شكرا لك على القراءة حتى النهاية وأراك قريباً!