كجيل جديد من السيطرة مع تحسين الإدراك ثلاثي الأبعاد والأحاسيس عن طريق اللمس ، يتعلم كيفية التعامل مع الأشياء من مجموعة واسعة
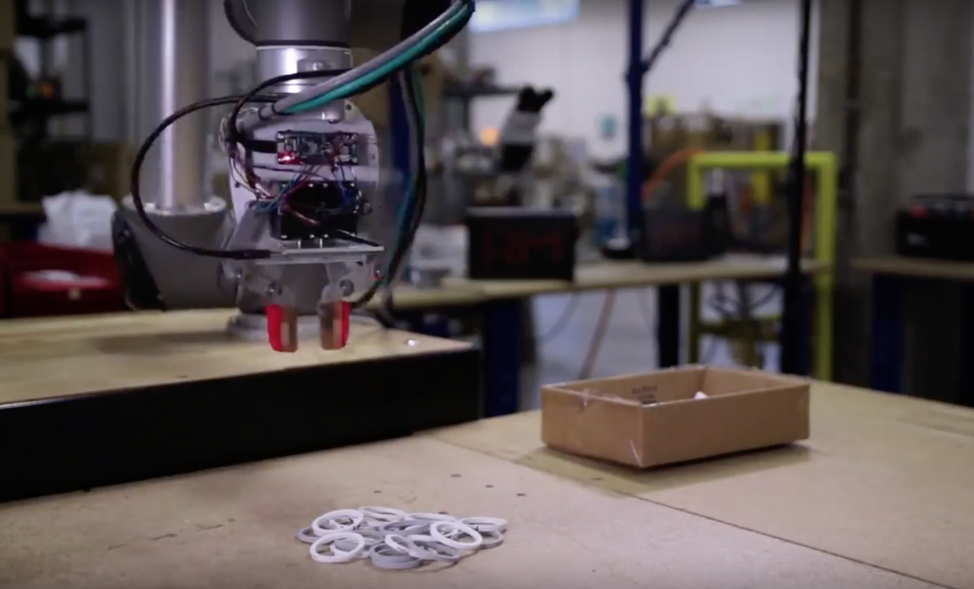
 يؤدي الالتقاط الذي أنشأته شركة Robotic Materials Inc. ، التي أسسها مؤلف المقال ، مهمة التلاعب في مسابقة التجميع الصناعي في قمة طوكيو العالمية للروبوتات.
يؤدي الالتقاط الذي أنشأته شركة Robotic Materials Inc. ، التي أسسها مؤلف المقال ، مهمة التلاعب في مسابقة التجميع الصناعي في قمة طوكيو العالمية للروبوتات.على الرغم من أن الروبوتات تمكنت من إعداد وجبة الإفطار
منذ عام 1961 ، إلا أن التلاعب بالأغراض العامة (MES) في العالم الحقيقي قد يمثل مشكلة أكثر تعقيدًا من القيادة الآلية للسيارات. ومع ذلك ، من الصعب وصف سبب ذلك تمامًا. إذا نظرت بعناية إلى الفيديو من عام 1961 ، يمكنك أن ترى أن الالتقاط المتوازي بإصبعين مناسب لعدد كبير جدًا من المهام ، وفقط عدم وجود الأحاسيس والحس السليم المضمن في الروبوت يمنعه من أداء مهام مماثلة في العالم الحقيقي. ذكرنا مقال نُشر مؤخرًا في مجلة Science بأنه حتى هذه المهمة الغنية باللمس مثل
تجميع الأثاث تكون ضمن إمكانيات الروبوتات الصناعية الحالية. المشكلة الحقيقية هي العدد الهائل من الحركات والتلاعب الممكنة ، والحركات المطلوبة لصنع شطيرة بالزبدة ، لا تتطابق بالضرورة مع الحركات اللازمة لتجميع الكرسي.
من وجهة نظر صناعية ، قد لا تكون MES مشكلة يجب معالجتها. بعد كل شيء ، يمكننا إنشاء آلة لأي شيء - صنع إسبرسو وغسيل الأطباق وتجميع القمح والإنتاج الضخم لأحذية الصالة الرياضية. هذه هي الطريقة التي يتم بها استخدام معظم الروبوتات في الصناعة الحديثة. حتى الروبوتات التي يتم ترقيتها كـ "آلات تعاون" تصبح أساسًا أجزاء من آلة أكثر تعقيدًا على خط التجميع (وهي لا تحتاج إلى حارس للعمل بأمان). تقاس محاولات تطوير MES التي تثير اهتمامًا علميًا فيما يتعلق بحالات الاستخدام هذه. لهذا السبب ، تصبح مزايا الحل المعمّم لمشكلة أقل وضوحًا وتتعرض لخطر الوقوع في "زقاق عدم الكفاءة" عندما يفقد المستثمرون والصناعة اهتمامهم بها. ومع ذلك ، تشمل عمليات الإنتاج والتسليم عددًا كبيرًا من المراحل المختلفة من المعالجة. حتى إذا كانت قيمة كل مرحلة تميل إلى الصفر ، فإن قيمتها الإجمالية مهمة اقتصاديًا.
كيف نعرف أن حل مشكلة التلاعب سيتم تعميمه بما يكفي للكشف عن هذه القيمة؟ اقترح مجتمع تطوير الروبوتات العديد من خيارات المنافسة التي يكون من الضروري فيها إما حل المشكلات المختلفة أو التعامل مع الكائنات المختلفة. هذه ، على سبيل المثال ، مسابقات مثل
RoboCup @ Home و
IROS و
Amazon Picking Challenge . على الرغم من أن هذه المسابقات تقوم بحملات لإيجاد حلول معممة ، إلا أنه لا يزال من الصعب الخروج بمهام لن تتغلب عليها الحلول المتخصصة بشكل أفضل. على سبيل المثال ، استخدم فريق IROS الحائز على كوريا نظام الروبوت
Baxter ونظام كتل الرغوة ذاتية اللصق لمعالجة عناصر مثل الألواح والملاعق. وبالمثل ، يمكن إنجاز معظم المهام في Amazon Picking Challenge باستخدام مضخة فراغ واحدة فقط. في الواقع ، نحن بحاجة إلى حل واحد للمعالجات التي تتكيف بشكل جيد مع كل هذه المهام.
تم تقديم وجهة نظر مختلفة عن الأشياء في مسابقة صناعية في القمة العالمية للروبوتات في طوكيو ، حيث قدموا جائزة بقيمة 130،000 دولار لفريق قادر على توفير حل معمم للعديد من المهام الصناعية لتحميل حاوية وتجميع العناصر التي يمكن التبديل بينها في يوم واحد. احتاجت الفرق أولاً إلى الحصول على كائنات بأحجام مختلفة جدًا من السلال (من المكسرات M3 إلى المحركات الكهربائية وأحزمة القيادة المرنة) ، ووضعها في حاوية ، ثم تجميع الهياكل المعقدة منها. لمثل هذه المنافسة ، هناك حاجة إلى حل للمعالجة لا يمكنه التقاط الأشياء ومعالجتها فحسب ، بل يمكن أيضًا إعادة برمجته بسهولة خلال يوم المسابقة. في حالة النجاح في إنشاء مثل هذه الروبوتات ، يمكن استخدامها كمساعدين في تجميع الأثاث أو المساعدة في الحركة أو مهام التلاعب الأخرى التي يمكن للناس فهمها بسهولة ، ولكن لا يمكن الروبوتات الحديثة.
مضخات الفراغ ، والسيطرة والروبوتات الناعمة
ما هي الخيارات المتاحة لدينا لتحقيق MES؟ في الأتمتة الصناعية ، تهيمن ثلاثة نماذج متنافسة: المضخات ، المقابض الميكانيكية والأذرع ، والروبوتات اللينة مؤخراً. توجد المضخات في المقدمة نظرًا لأن الكؤوس الشفطية تكون مشوهة وتتخذ شكل جسم ، حتى عندما يكون موقعها غير معروف تمامًا. بعد ذلك ، يمكنك امتصاص الهواء ، مما يجعل الوعاء صلبًا ويخلق قيدًا حلقيًا على حركة الكائن. هذا خيار جذاب ، نظرًا لأن كوب الشفط الواحد قادر على التقاط عدد كبير من الكائنات المختلفة. ومع ذلك ، فإن كوب الشفط لا يحل جميع المشكلات - على سبيل المثال ، عندما يكون الكائن ثقيلًا جدًا ، ومساميًا للغاية ، عندما يكون من الضروري إجراء مزيد من التلاعب ، أو عند تطبيق تأثيرات معينة عليه ، لمزيد من التلاعب.
 الكائنات ذات الثقوب يصعب انتزاعها بمجرد كوب الشفط
الكائنات ذات الثقوب يصعب انتزاعها بمجرد كوب الشفطيمكن استخدام التطبيق الدقيق للقوات عند استخدام القابضات الميكانيكية ، والتي يتم تنفيذها غالبًا في شكل قبضة متوازية أو آليتين من
أربع وصلات . تُستخدم حلول الأصابع الثلاثة في كثير من الأحيان ، وتظهر بشكل جيد إذا لزم الأمر ، التقاطات من الكائنات الأسطوانية من الأعلى. المشكلة في المقابض الضيقة هي أن سرعة المقبض يجب أن تكون صفراً على اتصال بالكائن لتجنب إرسال نبضات غير ضرورية. في حالة جهات الاتصال المرنة ، يتم الحفاظ على الدافع ، ونتيجة لذلك ترتد الأشياء الصغيرة من الالتقاط بسرعة عالية. يمكن تقليل الارتداد عن طريق تطبيق قبضة قابلة للتشويه للحصول على قدر أكبر من اللدونة التلامسية ، مما يزيد من دقة الإدراك بحيث يمكن أن تغلق القبضة في الوقت المحدد ، أو تقيد الحركة المحتملة للكائن.
في الحالات القصوى ، تؤدي هذه التدابير إلى استخدام قبضة ناعمة تمامًا ، مما يؤدي تشوهها إلى منع الكائن من الارتداد ، كما يقلل النعومة من الدقة اللازمة للإدراك. يكمن نجاح الالتقاط في منطقة التلامس الكبيرة لزيادة الاحتكاك وتقليل درجات الدوران لحرية الكائن. عند إمساك قضيب مربع باستخدام القابض ذو الإصبعين ، نحتاج إلى وضعه بحيث تكون الأصابع متوازية مع طائرتي القضيب. لا يحتاج المقبض اللين إلى تحديد اتجاه القضيب وتخطيط المقبض ، حيث إنه ببساطة سيحيط الكائن. لكن تشوه السيطرة ، مما يقلل من متطلبات التصور والتخطيط ، يعقد التطبيق المتحكم فيه للجهد. موضع الكائن في اليد الناعمة غير معروف ، ولا يسمح تشوهه بتطبيق الجهود بطريقة محكومة. عند التقاط الكائن ثم إسقاطه ، قد لا تكون هذه مشكلة ، ولكنها تعقد بشكل كبير التلاعب الذي تحتاجه لرفع الكائن ووضعه بشكل صحيح.
يمكن تحقيق نتائج عملية جيدة من خلال الجمع بين التحكم البسيط في الموقف والحد من عزم الدوران الأقصى للمحركات. مثل الأذرع الآلية الرخوة القابلة للتشوه ، يمكن للمقبض ذو التحكم في المقاومة أن يتكيف مع الكائن ، ويعوض عن عدم الدقة في الإدراك.
وبالتالي ، يجب أن تصبح القبضة المثالية صلبة أو ناعمة عند الضرورة ، مما يتيح لك التقاط الأشياء بأقل قدر من التصور والتخطيط ، مما يؤدي إلى التخلص من أوجه عدم اليقين في موقع الكائن والسماح بمعالجة صارمة. في الوقت نفسه ، يجب أن يحافظ سطح الالتقاط على تواصل مستمر مع الكائن. ويمكن تحقيق ذلك من خلال الجمع بين التقنيات المذكورة أعلاه. على سبيل المثال ، يمكن أن تصبح قبضة ناعمة صلبة مع انحشار حبيبي ، أو يمكن أن تستكمل آلية الشفط بقبضة لتوفير قيود إضافية. يمكن أن تستكمل قبضة ميكانيكية بكأس شفط أو منصات كهرباء لالتصاق قابل للكسر. تقوم اليد البشرية بعمل رائع في الجمع بين هذه الخصائص: يتيح لك الجمع بين العظام الصلبة والأنسجة الرخوة تغيير الصلابة ، ويمكن أن تغطي الأجسام ، مع الحفاظ على القدرة على التحكم بدقة. تتحقق هذه الفرص من خلال منصات الإصبع الناعمة ، والاحتكاك في الجلد والقدرة على الالتصاق - مثل قطعة صغيرة من الورق تلتصق بإصبع.
السيطرة عزم الدوران السيطرة
تتيح لنا بعض الميزات التي يسهل الوصول إليها الجمع بين مزايا الروبوتات اللينة والتقليدية لإنشاء حلول MON تجارية. واحد منهم هو التحكم في المقاومة كما هو مطبق على السيطرة التقليدية بإصبعين. من خلال التحكم في المقاومة ، نحن نتحكم في مقاومة الحركات الخارجية التي تفرضها البيئة. يمكن تحقيق نتائج عملية جيدة من خلال الجمع بين التحكم في الموقع البسيط مع تحديد الحد الأقصى لعزم الدوران للمحركات. عن طريق الحد من عزم الدوران ، يمكن أن تصبح قبضة صلبة مشوهة بشكل تعسفي (ضمن دقة أجهزة استشعار عزم الدوران). مثل المكافئ القابل للتشوه تمامًا ، يمكن للقبضة مع التحكم في المقاومة أن تتكيف مع الكائن ، لتعويض التصور غير الدقيق. في الوقت نفسه ، يمكن أن تصبح هذه الخطة صعبة للتلاعب الدقيق. السيطرة على المقاومة جنبا إلى جنب مع تصور موقف الأصابع هو شكل من أشكال الإحساس باللمس. سوف يكون Capture قادرًا على تحديد وجود الكائنات في البيئة وموقف التتبع وعزم الدوران. ستكون الحركات ناعمة ، لتعويض عدم دقة الإدراك.
 أعلاه: الاستيلاء على الفراولة باستخدام التحكم في المقاومة. يتيح الحد الأقصى لعزم الدوران المسموح به أن تتوقف الأصابع عند ملامسة إحدى العقبات وليس لسحق التوت.
أعلاه: الاستيلاء على الفراولة باستخدام التحكم في المقاومة. يتيح الحد الأقصى لعزم الدوران المسموح به أن تتوقف الأصابع عند ملامسة إحدى العقبات وليس لسحق التوت.
أدناه: التقاط كائن صلب مع سيطرة المقاومة. يسمح التحكم في عزم الدوران للأصابع بالتحرك حتى يحدث التلامس. معرفة موقف كل إصبع ، يمكنك إدخال السيطرة على الموقف على مستوى الذراع كله.يمكن السيطرة على عزم الدوران يمكن أن تكون بمثابة منصة لتجسيد نتائج البحوث الأخيرة على المتلاعبين لينة: تكملة أطراف الأصابع والنخيل مع كوب الشفط ، نحن نجمع بين مزايا التحكم الدقيق في الموقف والجهد وموثوقية أكواب الشفط. يمكن استكمال مستشعر عزم الدوران في مفاصل الأصابع بأجهزة استشعار عن طريق اللمس تقيس الضغط ، ويتمتع بموقع استراتيجي على المقبض. يمكن أن تساعد مستشعرات اللمس والنصائح اللمسية في التمييز بين ما إذا كانت هناك عقبة خارجية تمنع حركة الأصابع ، أو إذا كانت اليد تلامس الكائن المطلوب. تقوم المستشعرات اللمسية أيضًا بإضافة أجهزة استشعار بصرية مباشرةً ، وتحديد لحظة التلامس وتحسين تقييم اتجاه الكائن والمكان الذي أمسك به اليد.
الإنجازات الحديثة للإدراك ثلاثي الأبعاد تجعل هدف MES قريبًا كما لم يحدث من قبل. أجهزة استشعار ثلاثية الأبعاد مثل Intel RealSense قادرة على استشعار وجود الكائنات 11 سم من الكاميرا بدقة تسمح لك بالتقاط حتى
الأشياء الصغيرة مثل المكسرات M3 ، والحلول المعقدة متوفرة بالفعل في السوق - على سبيل المثال ، Robotic Materials Inc. ، بناءً على بحث من مختبري ،
صدر للتو بيتا من يدها. يتيح لك العمل المشترك المتمثل في الإدراك الدقيق ثلاثي الأبعاد والتحكم في المقاومة للتفاعل اللطيف مع البيئة ومختلف أساليب الإحساس باللمس التي تتيح لك تقييم نجاح الالتقاط ، إجراء معالجة موثوقة للأشياء في بيئة غير دقيقة.
على سبيل المثال ، لقد أظهرنا مؤخرًا التعبئة المتنقلة للحاويات ، والتي يلزم فيها الروبوت للحصول على كائنات من ثلاثة أنواع مختلفة (المكسرات M3 وجزء من الآلية وحزام مطاطي) من السلال ، وموقعه على الطاولة معروف فقط تقريبًا. على الرغم من الخطأ 10 سم الناتج عن النقل الذاتي الذي يتحرك على طول نقاط الحدود المختلفة للمستودع ، تمكن الروبوت من اكتشاف سلال وأشياء فردية باستخدام تصور ثلاثي الأبعاد مدمج في اليد. يستخدم عزم الدوران للتفاعل بدقة مع محتويات السلال ويقلل من تأثير الاصطدامات المحتملة. يتم استخدام الإدراك باللمس باستخدام قياس عزم الدوران لقياس نجاح المقبض.
على الرغم من النجاحات المدهشة للإدراك ثلاثي الأبعاد والتحكم في المقاومة والإدراك الملموس في حالة MES ، فإن هذه التقنيات تتناقض مع النموذج الصناعي السائد للحلول المتخصصة للمتلاعبين. أي شكل من أشكال الإدراك يستغرق وقتًا ويفرض قيودًا على سرعة الالتقاط اللازمة للحد من طاقة التأثيرات غير المتوقعة. لذلك ، ستكون الشركات الصغيرة والمتوسطة الحجم في طليعة MES التي تعمل بتشكيلة كبيرة وعدد صغير من المنتجات ، بالإضافة إلى اللاعبين الكبار الذين يرغبون في تمييز منتجاتهم ، مما يقلل من دورة الإنتاج ويزيد من إمكانيات التخصيص. في الوقت نفسه ، توجد روبوتات متحركة بشكل متزايد في المستودعات والفنادق والمستشفيات. في مثل هذه الحالات ، يمكن أن تؤدي بعض المعالجات ، مثل التحميل والتفريغ والصيانة ، إلى زيادة قيمة هذه الروبوتات بشكل كبير ، مما يخلق المتطلبات الاقتصادية اللازمة لحل مهمة المعالجة للأغراض العامة.